Savoir où - dedans comme dehors - SwissTopo
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous

Géodésie et Direction fédérale des mensurations cadastrales Report 21-02 2021
Savoir où – dedans comme dehors
© swisstopo
Positionnement et navigation en intérieur : pour une navi
gation parfaitement fluide de la gare de Berne jusqu’à une
salle de réunion.
Rapport sur l’expérience acquise durant le projet pilote
Maria Klonner
Jürg Liechti
Simon Gartmann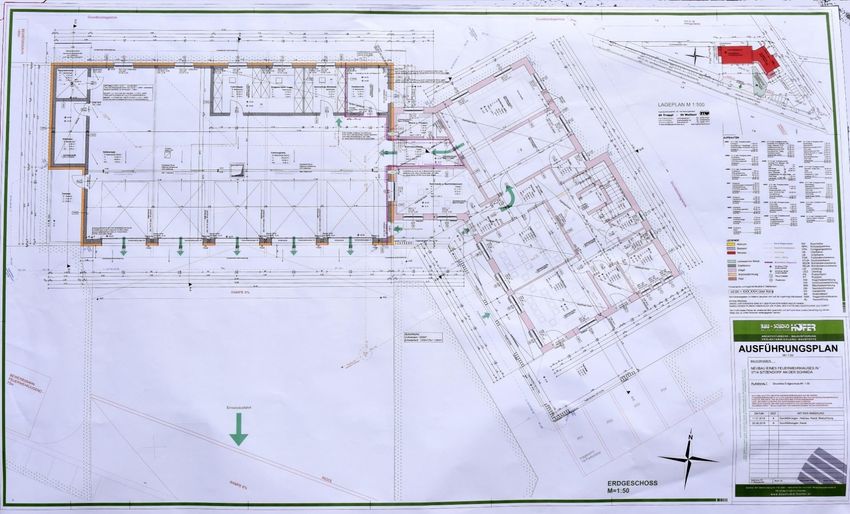
Photo de couverture : itinéraire suivi jusqu’à une salle de réunion de swisstopo, appli WebApp (M. Klonner) Impressum © 2021 Office fédéral de topographie swisstopo Certificat SQS ISO 9001:2015 Rédaction : Office fédéral de topographie swisstopo Géodésie et Direction fédérale des mensurations cadastrales Seftigenstrasse 264 CH-3084 Wabern Téléphone : +41 58 469 01 11 Courriel : vermessung@swisstopo.ch
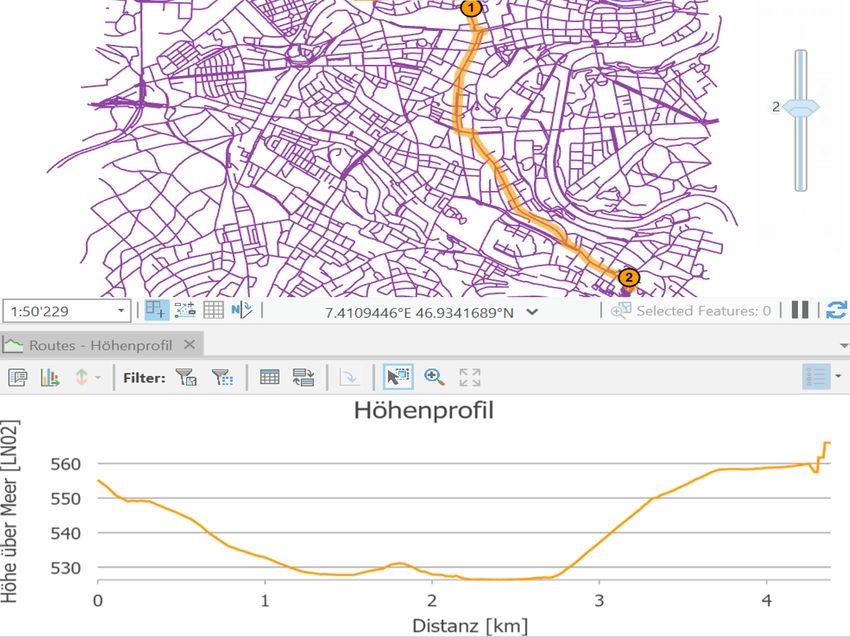
Table des matières
1. Introduction 3
2. Introduction à la géolocalisation 4
2.1. Description de l’espace intérieur 5
2.1.1. Modèle de données 5
2.1.2. Représentation graphique 6
2.2. Itinéraire (routing) 7
2.3. Positionnement 7
2.4. Influences non techniques 9
2.4.1. Que se passe-t-il avec les données saisies ? 9
2.4.2. Réserves d’ordre sanitaire 9
3. Géolocalisation en intérieur : planifier la mise en œuvre 10
3.1. Cas d’utilisation 10
3.2. Exigences envers l’application 12
3.3. Technologies 15
3.3.1. GNSS et pseudolites 16
3.3.2. WiFi 17
3.3.3. Balises (beacons) Bluetooth 17
3.3.4. UWB 18
3.3.5. Lumière 18
3.3.6. RFID passive (UHF ou HF) 19
3.3.7. GSM 19
3.3.8. (Ultra)Sons 19
3.3.9. Fusion de capteurs (Sensor fusion) 20
3.4. Evaluation des technologies et des exigences 20
3.5. Tendances 21
4. Projet pilote de positionnement en intérieur au sein de swisstopo 22
4.1. Définition du projet pilote 22
4.1.1. Cas d’utilisation concret 22
4.1.2. Exigences 23
4.1.3. Technologie 24
4.2. Mise en œuvre du positionnement en intérieur 24
4.3. Représentation graphique 25
4.3.1. Préparer les données et remplir le modèle de données 25
4.3.2. Traiter les données 30
4.3.3. Préparer le plan visuellement 30
4.4. Itinéraire 32
4.4.1. Créer un réseau de chemins 32
4.4.2. Intégrer le MTP et les noms des rues 33
4.5. Publication des données 35
4.5.1. Appli de démonstration ArcGIS Indoors 35
4.5.2. Appli WebApp 36
Savoir où – dedans comme dehors. Positionnement et navigation en intérieur 1 / 48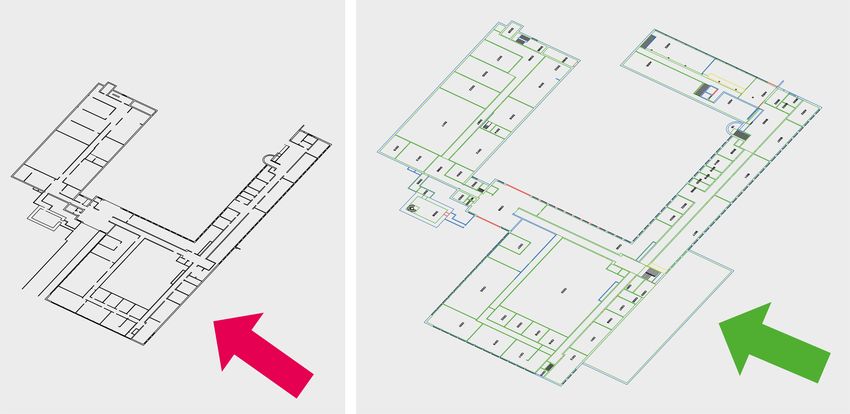
4.5.3. Visualisation sur map.geo.admin.ch 37
4.6. Positionnement en intérieur 37
4.6.1. Installation du matériel 37
4.6.2. Préparation du plan par étage 39
4.6.3. Mesure de référence 39
4.6.4. Mise en relation du positionnement et du plan d’intérieur 40
5. Bilan 41
Liste des abréviations 43
Bibliographie 45
Liste des figures 46
Liste des tableaux 48
Savoir où – dedans comme dehors. Positionnement et navigation en intérieur 2 / 48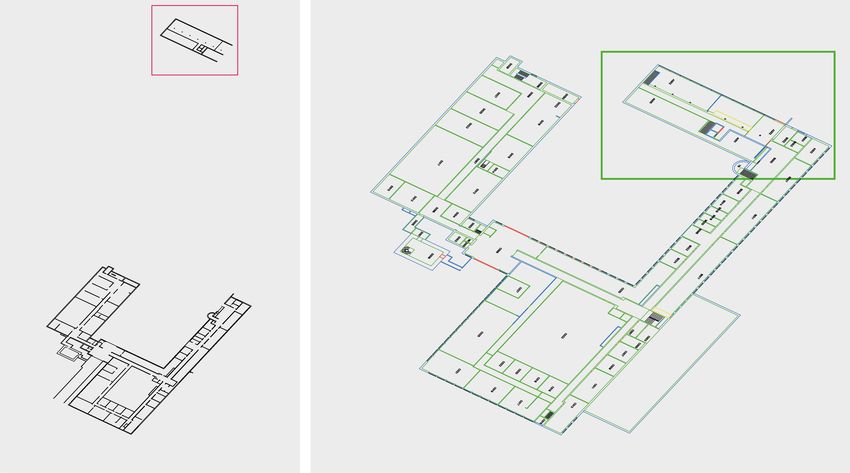
1. Introduction Obtenir une position précise en extérieur relève de l’évidence aujourd’hui. Du fait de la large diffusion des smartphones, depuis 2007, et des systèmes de navigation embarqués à bord de nos véhicules, notre po sition et sa précision ont gagné en importance au quotidien. L’omniprésence du positionnement conduit donc à se demander s’il est aussi possible de le déterminer en intérieur. Pour pouvoir répondre à cette question, les auteurs se sont d’abord penchés sur divers aspects théoriques liés à la géolocalisation en intérieur. Un projet pilote a ensuite été exécuté sur la base des enseignements ainsi tirés. Le rapport commence par présenter les bases de la géolocalisation en intérieur au chapitre 2. La géoloca lisation se fonde sur trois composantes que sont la description de l’espace intérieur, l’itinéraire (routing) et la détermination de sa propre position. La planification de la mise en œuvre d’un projet de géolocalisation en intérieur est ensuite exposée au chapitre 3. Les raisons de l’interaction entre l’application, les exigences et le choix de la technologie sont précisées. Ainsi, les exigences et les conditions-cadre ne sont analysées qu’une fois l’application définie. Des possibilités en résultent alors pour la technologie. Celle choisie doit donc être en accord avec l’appli cation et les exigences. La complexité de la géolocalisation se reflète à travers de nombreuses exigences (§ 3.2) brièvement dé crites au sein de tableaux. Nous présentons les technologies principales (§ 3.3), avec leurs avantages et leurs inconvénients. Nous proposons par ailleurs un diagramme en étoile (de Kiviat) issu de ce travail (Figure 3-5) comme une possibilité de visualisation et d’analyse des informations acquises. Après la partie théorique, c’est le projet pilote de positionnement en intérieur au sein de l’Office fédéral de topographie swisstopo qui est détaillé au chapitre 4. La prise de décision et la mise en œuvre sur le plan technique se sont fondées sur les bases théoriques précédemment exposées et ont été appliquées à un cas d’utilisation concret. L’application s’est construite à partir de ce cas concret, puis les exigences ont été déterminées et les technologies possibles ont enfin été analysées. La première étape de la mise en œuvre a consisté à remplir le modèle de données de l’espace intérieur avec les données existantes. Les données soumises à des traitements complémentaires ont servi de base à la visualisation puis à la publication. Les rues les plus proches ont par ailleurs été intégrées au modèle et le positionnement fondé sur des balises (beacons) Bluetooth a été testé dans une partie du bâtiment. Les résultats sont enfin récapitulés au chapitre 5 et des perspectives d’avenir sont esquissées. Les points principaux du rapport, résultant du projet pilote et de la partie théorique, sont présentés de manière com pacte. Les tendances déduites sont replacées dans le contexte global de la géolocalisation. Savoir où – dedans comme dehors. Positionnement et navigation en intérieur 3 / 48

2. Introduction à la géolocalisation
La géolocalisation, autrement dit la détermination de la position dans l’espace, peut être subdivisée en
deux parties, comme le montre la Figure 2-1 : il y a d’une part la localisation (comme dans le cas du radar),
où des tiers déterminent la position d’un objet, et d’autre part le positionnement au sens strict, où l’on
détermine soi-même sa position (comme pour le GPS1). La localisation et le positionnement peuvent aussi
bien être utilisés pour des personnes que pour des objets.
Figure 2-1 : définition des notions liées à la géolocalisation
Depuis l’apparition du premier iPhone en 2007, les smartphones se sont généralisés à une vitesse expo
nentielle . Cela a notamment conduit à ce qu’une grande partie de la population entre en contact pour la
toute première fois avec le positionnement par GNSS (Global Navigation Satellite System)2 et la navigation.
Que ce soit dans les équipements de navigation proposés sur le marché ou sur l’application cartographique
préinstallée d’un téléphone portable, la position de l’utilisateur est toujours indiquée par un point bleu ou
une flèche bleue. Avec l’essor actuel des communications numériques, un nombre sans cesse croissant
d’appareils, téléphones portables ou autres, est par ailleurs connecté en continu à Internet ou au réseau
de téléphonie mobile. Cela permet de localiser parfaitement et en permanence de nombreux équipements
simultanément, en exploitant les données de connexion.
Toutefois, une grande partie des utilisatrices et des utilisateurs ne s’intéresse pas plus que cela à la tech
nologie à l’œuvre derrière le positionnement par GNSS : ‘ça fonctionne, c’est tout’. C’est pourquoi les non-
initiés ne comprennent généralement pas que ‘le GPS’ puisse ne pas fonctionner. Pourquoi ne puis-je pas
voir où je me trouve en avion ? Pourquoi la navigation ne fonctionne-t-elle pas en intérieur ? Ces questions
surgissent souvent et restent sans réponse la plupart du temps.
Que faut-il alors pour que le point bleu indique aussi la position correcte sur le plan à l’intérieur ? Qu’est-
ce qui distingue le positionnement de personnes du suivi d’actifs ou d’utilisateurs (Asset or User Tracking)3
? C’est à ces questions que le présent rapport entend répondre de manière simple et compréhensible.
1
Le GPS (Global Positioning System) américain a été développé à l’origine pour un usage militaire. Il est aussi dispo
nible pour un usage civil depuis l’an 2000 par l’abandon de l’accès sélectif qui consistait en une dégradation artificielle
du signal (swisstopo, 2020).
2
On parle de GNSS lorsque l’on inclut tous les systèmes mondiaux de navigation par satellites existants. Outre le
GPS, il s’agit du Glonass russe, du Beidou chinois et du Galileo européen.
3
Par Asset Tracking, on entend le suivi d’actifs, donc d’objets possédant une certaine valeur. Les objets désignés
comme étant des actifs peuvent varier en fonction du cas de figure considéré : au bureau, c’est le matériel informa
tique, ordinateurs portables ou autres ; pour les services de messagerie, ce sont les colis à livrer ; dans l’industrie, ce
sont des pièces ou des appareils. Ce qui est commun à tous ces actifs, c’est que le suivi permet de savoir où ils sont
à tout moment. Il en va de même du suivi des utilisateurs qui vise à analyser leurs déplacements en continu. Cela
peut prendre la forme de profils de déplacement ciblés (quand et où cette personne s’arrête-t-elle, avec qui commu
nique-t-elle ? cf. recherche de collaborateurs sur la Figure 3-2), mais les résultats peuvent aussi concerner un groupe
de personnes (réalisation d’analyses de fréquences, cf. carte thermique/taux d’utilisation sur la Figure 3-2).
Savoir où – dedans comme dehors. Positionnement et navigation en intérieur 4 / 48
Le positionnement en intérieur se compose de trois éléments :
1. La description de l’espace intérieur, avec les informations le concernant (modèle de données) et sa
géométrie (visualisation ou représentation).
2. L’itinéraire (routing) : quels chemins peut-on emprunter pour se rendre d’un lieu A à un lieu B ?
3. Le positionnement au sens strict : comment peut-on déterminer sa propre position ?
Ces trois éléments vont être décrits dans les paragraphes suivants.
2.1. Description de l’espace intérieur
Cette première étape du positionnement en intérieur comprend deux parties : un modèle de données stock
ant les données recueillies d’une manière structurée et une représentation graphique de ces données. Ces
deux éléments permettent de reproduire aussi bien la géométrie (où se trouvent les murs, les portes, les
escaliers ?) que les informations disponibles (quels étages sont reliés entre eux par les escaliers, quelles
sont les heures d’ouverture de la cafétéria ?).
2.1.1. Modèle de données
Un modèle de données propose une structure pour le stockage des données nécessaires. Un modèle de
données pour la navigation en intérieur doit, de plus, pouvoir reproduire les relations existantes entre les
objets.
Un point d’intérêt (Point of Interest, une machine à café par exemple) est affecté à un local (B206). Ce local
fait lui-même partie d’un étage (2ème étage) dans une partie du bâtiment (aile B) dont l’adresse est Sefti
genstrasse 264. Le 2ème étage est situé sous le 3ème étage et surmonte lui-même le 1er étage. Le 2ème étage
est dépourvu d’accès vers l’extérieur, mais présente des ascenseurs et des cages d’escalier qui le relient
aux étages adjacents.
Un modèle de données pour le suivi d’actifs pourrait reproduire les relations suivantes :
Un actif (par exemple l’ordinateur portable T304933) possède un identifiant propre, différentes propriétés
(modèle, numéro de commande, attribué à, contenu, destinataire) et des informations lui sont associées,
concernant son emplacement actuel, passé et futur prévu. Le numéro de commande permet de connaître
le fournisseur et la date de livraison. Les points d’accès affectés à chacun des emplacements sont saisis,
de même que leur position dans le bâtiment (exemples : étagère 30, rangée 25, niveau 4 ou ascenseur A
3ème étage). Pour autant que le modèle de données le permette, les actifs peuvent être regroupés au sein
de livraisons et continuer à n’exister que sous cette forme.
Comme on peut le constater, les modèles de données varient très fortement d’une application à l’autre.
Imaginons maintenant un centre commercial, avec ses magasins et ses kiosques dans les allées : qu’est-
ce qui distingue un kiosque d’un magasin ? Où saisir les heures d’ouverture et les locataires ? Quelles
catégories doivent être proposées pour les boutiques ? Comment les magasins qui s’étendent sur plusieurs
étages sont-ils traités ? Toutes ces questions sont abordées dans le modèle de données. Des fournisseurs
différents résolvent les tâches de manières différentes, ce dont résultent des modèles de données diffé
rents. S’il existe des formats ouverts tels qu’IndoorGML ou Simple Indoor Tagging d’Open-StreetMaps, ils
ne sont pas utilisés à des fins commerciales à notre connaissance.
En principe, choisir un modèle de données n’implique pas nécessairement de choisir un fournisseur, mais
dans les faits, la corrélation entre les deux est très forte. Nombreux sont les fournisseurs à n’accepter que
des bâtiments respectant leur propre standard (par exemple Apple Maps). Avec ArcGIS Pro il est possible
théoriquement d’implémenter n’importe quel modèle de données, cependant les outils disponibles fonc
tionnent mieux avec le modèle de données proposé par le logiciel.
Le modèle de données choisi ou le partenaire retenu pour la mise en œuvre conditionne aussi l’intégration
possible ou non des données de l’espace intérieur dans Apple Maps ou Google Maps. En cas d’intégration,
il est plus probable qu’une navigation fluide soit possible sans appli supplémentaire. C’est toutefois en
Savoir où – dedans comme dehors. Positionnement et navigation en intérieur 5 / 48
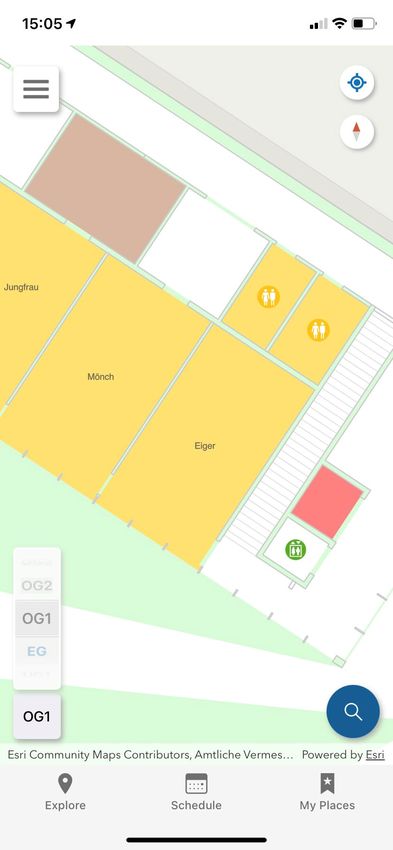
développant sa propre appli que l’on bénéficie de la liberté la plus grande et des possibilités les plus éten dues lors de la mise en œuvre. Les ressources disponibles et les connaissances techniques sont en fait les seules limites à la mise en œuvre dans ce cas de figure. Les fonctions de positionnement peuvent être intégrées au moyen de bibliothèques ou de services, afin d’obtenir une solution sur mesure, satisfaisant pleinement ses propres besoins. 2.1.2. Représentation graphique Des plans intérieurs sont requis pour un système convivial. En extérieur, les cartes sont répandues depuis fort longtemps et leur établissement fait souvent suite à une mensuration de la zone considérée ou à la prise de vues aériennes. Suivant le but de l’utilisation, les cartes sont enrichies par des informations utiles, cas par exemple des restaurants, du nom des sommets, des arrêts des transports publics, des places de stationnement ou des fontaines d’eau potable. En intérieur, les plans d’exécution sont souvent les seules représentations disponibles et ils ne sont plus actualisés une fois la construction achevée. On trouve aussi des plans d’évacuation ou des plans d’orien tation ici ou là, mais leur qualité laisse généralement à désirer. La Figure 2-2 présente quelques exemples. Ainsi, une source de données doit d’abord être trouvée pour la géométrie du bâtiment, pouvant éventuel lement nécessiter quelques reprises. Le degré de généralisation est un élément à considérer également pour les plans intérieurs. Un équilibre doit être trouvé : un nombre suffisant de points d'orientation doit être présent pour les utilisatrices et les utilisateurs du plan sans le surcharger de détails inutiles. Il faut par ailleurs se demander quels locaux ou objets internes au bâtiment peuvent revêtir de l’intérêt. On les appelle les POI (Point(s) of Interest). En intérieur, un POI peut être un bureau, une salle de réunion, une place de stationnement pour vélo, ou une machine à café. Les plans des bâtiments et les informations supplémen taires sont enregistrés dans le modèle de données sélectionné. La représentation graphique en est déduite. Figure 2-2 : exemples de plans d’intérieur : plan d’évacuation - Wikipédia (GrupsniHexe, 2010), copies d’écran - Google Maps / Apple Maps, plan d’exécution - Wikipédia (Manfred Kunzel, 2018) Ce sont le type de bâtiment et la nature de l’application qui décident des POI saisis. Voici quelques exemples pour la navigation au sein d’un bâtiment : - université : salles de cours, laboratoires, instituts - hôpital : salles d’opération, de diagnostic et de traitement - centre commercial : magasins, toilettes - complexe industriel : bureaux, ateliers, salles de réunion, douches. Certaines données relatives aux POI peuvent être déduites des locaux, mais d’autres doivent être saisies. Les données sont stockées hiérarchiquement dans le modèle de données. L’utilisation des données définit l’application, par exemple : Savoir où – dedans comme dehors. Positionnement et navigation en intérieur 6 / 48
- services généraux / facility management : trouver des équipements devant subir une maintenance
- université : les étudiants du premier semestre cherchent leurs salles de cours
- complexe industriel : affichage de la prochaine salle de réunion libre dans Outlook, affichage des
postes de travail libres en cas de bureaux partagés (Desk Sharing).
Il est judicieux de subdiviser les POI en catégories, afin de trouver facilement l’information souhaitée. Des
codes couleur clairs sur le plan affiché ainsi que des géométries simplifiées aident les utilisatrices et les
utilisateurs à bien s’orienter.
Avec ces informations, on peut proposer un plan4 sur lequel la position des POI est représentée. En cas
de mise à disposition sous forme numérique, les POI peuvent également être consultés. Cela peut se ré
véler suffisant pour de nombreuses applications. Les données peuvent aussi être mises à disposition
hors ligne. Aucune connexion Internet n’est alors requise et le suivi en temps réel des utilisatrices et des
utilisateurs est empêché.
2.2. Itinéraire (routing)
La deuxième étape du positionnement est la création d’un itinéraire. A cette fin, des chemins entre les
POI et des passages entre les étages sont d’abord créés. Le rattachement à l’extérieur doit aussi être
prévu, pour autant que le bâtiment ne doive pas en rester coupé. Des itinéraires sont ensuite générés par
l‘analyse des chemins, ouvrant ainsi la porte à la navigation au moyen d’une application adaptée.
Cette fonction d’itinéraire correspond à la planification d’un itinéraire dans un calculateur de trajet. Cela
signifie qu’un POI peut être recherché dans l’application et qu’un itinéraire est affiché d’un point donné
vers ce POI. Suivre cet itinéraire est de la responsabilité de l’utilisatrice ou de l’utilisateur. Pour garantir
que l’on se trouve bien sur le bon chemin, les informations des alentours doivent constamment être com
parées au plan.
2.3. Positionnement
La troisième étape est l’ajout du positionnement au sens strict, ce qui permet d’afficher sa propre position
comme un point bleu sur le plan. Il faut pour cela disposer d’un système de positionnement en intérieur
(IPS). Bien des options sont envisageables sur le plan technique pour sa mise en œuvre et des technolo
gies possibles dans ce cadre sont présentées au paragraphe 3.3.
Tout IPS a besoin de capteurs de position5, à l’aide desquels la position peut être calculée. C’est sans
importance, dans ce cadre, que l’on connaisse ou non la position des capteurs. En revanche, la position
calculée à partir des signaux transmis s’appuie généralement sur l’une des méthodes suivantes :
- Fingerprinting / empreintes digitales : Etant donné que la force d’un signal est dépendant de l’environ
nement (murs, portes métalliques, …) on ne peut pas simplement se fier à la force du signal pour dé
terminer la position. Une empreinte digitales est créée pour chaque point de l’environnement afin de
cataloguer les différents signaux visibles et leur force. Une recherche est alors entreprise parmi les
empreintes digitales pour trouver celle qui s’en rapproche le plus. C’est alors elle qui fournit la position.
- Triangulation : position déterminée à l’aide de trois angles (ou davantage)
- Trilatération : position déterminée au moyen de trois distances ou mesures de temps de parcours (ou
davantage).
4
D’ordinaire, à partir de l’échelle du 1:10 000 et à l’intérieur d’un bâtiment, on ne parle plus de carte, mais de plan.
Cette différence n’existe pas en anglais, puisqu’il est question de map dans les deux cas.
5
Les capteurs de position comprennent notamment les satellites GNSS, les stations de base WiFi ou les balises
(beacons) Bluetooth.
Savoir où – dedans comme dehors. Positionnement et navigation en intérieur 7 / 48
Le lieu d’exécution du calcul dépend de l’implémentation concernée et peut avoir de fortes répercussions
sur la protection des données. Sur la Figure 2-3.1, la position (A) est directement calculée sur le terminal,
à partir des signaux. C’est le cas de figure du GNSS, pour lequel les signaux des satellites sont suffisants
pour déterminer la position. Une situation un peu plus complexe est représentée sur la Figure 2-3.2 : les
positions des capteurs n’étant pas connues, des informations supplémentaires telles que des données de
mappage sont nécessaires pour déterminer la position. Si ces informations sont disponibles sur le termi
nal, la position peut y être calculée (B). Si ce n’est pas le cas, la détermination doit être externalisée sur
un serveur. Ce dernier peut alors retourner la position (C) ou la stocker pour la conserver (D)6.
Figure 2-3 : positionnement - 1) Le terminal capte des signaux et calcule directement la position à partir d’eux. 2) Le
terminal reçoit des signaux émis par les capteurs. Des informations supplémentaires sont requises pour le traitement,
afin d’effectuer un mappage entre les capteurs de position et la position absolue. La position peut être déterminée soit
sur un serveur soit sur le terminal, selon l’endroit où les données de mappage sont disponibles.
L’IPS peut exploiter d’autres capteurs du terminal, en plus de la technologie retenue, afin d’améliorer la
qualité de la position. Cette méthode est connue sous le nom de Sensor Fusion. La technologie détermine
la précision du positionnement et influe sur la capacité à fonctionner hors ligne et sur le niveau de protection
des données offert par la solution.
Il doit en outre être possible, suivant le cas de figure considéré, de désactiver (par exemple pour des articles
de supermarché après le passage en caisse) ou d’activer (par exemple pour des collaborateurs sans poste
de travail fixe) la détermination de la position. Le geofencing est aussi envisageable : il consiste à déclen
cher une alarme lorsque l’objet quitte une zone donnée. Le suivi d’actifs dans les différentes variantes
indiquées existe depuis un certain temps déjà, surtout pour des applications industrielles ou commerciales.
La protection des données doit impérativement être prise en compte pour le suivi de personnes dans l’es
pace (semi-)public. Dans l’industrie, la technologie doit être choisie avec grand soin, afin de trouver le juste
équilibre, pour l’application considérée, entre une position précise, les frais d’installation, la couverture sur
site comme à l’extérieur et la convivialité.
De manière générale, une solution de positionnement en intérieur n’est pas nécessairement adaptée au
suivi d’actifs, la réciproque étant également vraie. Lors d’un tel suivi, on veut généralement connaître tous
6
Ce thème bénéficie d’un traitement approfondi dans de nombreuses publications (swisstopo, 2020) (Brand, et al.,
2017). Dans le présent rapport, nous nous sommes bornés à récapituler brièvement les points principaux.
Savoir où – dedans comme dehors. Positionnement et navigation en intérieur 8 / 48les mouvements d’un objet et on a souvent besoin de la position au mètre près dans un entrepôt à rayon nages élevés. Si 0,1% seulement des objets ne sont pas saisis avec précision, le gain inhérent à l’automa tisation est déjà réduit, puisqu’il faut continuer à chercher des actifs. Un humain en revanche peut très bien se débrouiller avec une position imprécise, pour autant qu’il dispose par ailleurs d’autres informations en nombre suffisant : l’IPS affiche un bureau comme position, mais le collaborateur ou la collaboratrice est debout devant le bureau. C’est suffisant en pratique. Nous reviendrons plus en détail sur les interactions entre l’application, la technologie et les exigences au chapitre 3. 2.4. Influences non techniques Outre les aspects mentionnés jusqu’à présent au chapitre 2, il conviendrait également de tenir compte des influences non techniques à un stade précoce. Elles peuvent être décisives pour l’acceptation d’un projet. 2.4.1. Que se passe-t-il avec les données saisies ? Comme cela a déjà été indiqué dans l’introduction, un bon équilibre devrait être trouvé entre la protection et l’utilisation des données. Une communication ouverte envers toutes les parties concernées par le projet contribue à ce que les utilisatrices et les utilisateurs puissent correctement évaluer le système. En principe, le positionnement ne nécessite pas la saisie de donnés des utilisateurs, comme dans le cas des GNSS. Lorsque la collecte et l’exploitation des données sont possibles, on devrait savoir quelles données sont exploitées par qui et à quelle fin. Et cela indépendamment du fait que les utilisatrices et les utilisateurs puissent recourir librement au système (par exemple pour connaître leur position à l’intérieur d’un aéroport) ou qu’ils n’aient pas d’autre choix (par exemple lorsqu’ils s’enregistrent à leur poste de travail après avoir réservé leur bureau et que leur position est chargée dans le registre des adresses de l’entreprise). Enfin, quand l’exploitant du système veut utiliser les données, diverses options sont envisageables : les informa tions peuvent être agrégées, par exemple celles sur le taux d’occupation de la cafétéria, ou au contraire être individualisées, pour savoir qui passe combien de temps à la cafétéria. 2.4.2. Réserves d’ordre sanitaire Une question finit inévitablement par se poser dans la plupart des projets faisant intervenir des ondes radio : qu’en est-il de l’exposition aux rayonnements et de la sécurité de la technologie retenue ? Bien que tout le monde ou presque possède un téléphone portable aujourd’hui, tout rayonnement électromagnétique supplémentaire éveille des craintes. Il est très rare que l’on parvienne à lever tous les doutes dans ce domaine, mais il est souvent rassurant de savoir que l’électronique proposée au grand public en Europe fait l’objet de tests intensifs et que les émissions maximales autorisées ne sont pas dépassées. Une com paraison de l’exposition due à la technologie mise en œuvre avec celle due au WiFi ou aux micro-ondes permet de relativiser les choses. Savoir où – dedans comme dehors. Positionnement et navigation en intérieur 9 / 48
3. Géolocalisation en intérieur : planifier la mise en œuvre Lorsque la géolocalisation est mise en œuvre au sein d’une entreprise, les trois aspects que sont l’appli cation, les exigences et la technologie (cf. Figure 3-1) doivent être parfaitement coordonnés entre eux. Comme la figure le laisse entrevoir, ces trois aspects s’influencent mutuellement et ne peuvent par consé quent pas être envisagés séparément. Figure 3-1 : les interactions entre les applications, les exigences et la technologie Il est judicieux de réfléchir en premier lieu à l’application devant être mise en œuvre. Les exigences de vraient ensuite être définies sur la base de ce choix. L’application pouvant éventuellement subir une modi fication ici, la technologie ne devrait être choisie qu’à ce stade. Le choix de la technologie peut à son tour influer sur les exigences ou sur l’application. Ce travail préparatoire constitue la première étape importante sur la voie du succès pour un projet. Les paragraphes suivants livrent des pistes pour développer ses propres réflexions en matière d’applica tions, d’exigences et de technologies et indiquent comment les résultats peuvent être visualisés et analysés grâce à un diagramme en étoile. 3.1. Cas d’utilisation L’acquisition de géodonnées d’un environnement intérieur permettent la mise en œuvre de nombreuses applications. Diverses possibilités sont présentées sur la Figure 3-2 en les situant à la fois en termes de localisation / positionnement et de personnes / objets. Savoir où – dedans comme dehors. Positionnement et navigation en intérieur 10 / 48
Figure 3-2: situation de diverses applications possibles entre localisation et positionnement Les processus classiques de navigation et d’orientation positionnent des personnes dans l’espace. Au cun transfert de données de position à caractère privé n’est en principe requis pour cela. Dans le cas de l‘orientation, seules des informations sous forme de plans sont mises à la disposition des utilisatrices et des utilisateurs. La position que l’on occupe peut être présentée sur le plan numérique. Pour trouver un lieu, la réalité est comparée au plan, comme on le ferait pour s’orienter avec une carte d’excursions. La navigation va plus loin et donne des indications qui conduisent les utilisatrices et les utilisateurs à destina tion pas à pas (vraisemblablement aussi lorsque l’on s’écarte de l’itinéraire prescrit). L’utilisation par des véhicules autonomes constituerait une application analogue pour des objets. La plupart des applications se fondent sur la localisation, c’est-à-dire sur le fait qu’un tiers exploite la posi tion pour proposer des prestations de services sur cette base. A titre d’exemple, le partage de données de navigation et d’orientation pourrait permettre de générer des cartes thermiques (heatmaps), indiquant la répartition du personnel dans le bâtiment au cours du temps. On pourrait en déduire les zones nécessitant un nettoyage plus fréquent ou les endroits constituant des goulets d’étranglement. Les services géodé pendants (ou Location based services, LBS) peuvent aussi se situer à la limite entre localisation et posi tionnement. Fairtiq (Fairtiq, 2020), un système de billetterie pour les transports publics, constitue par exemple un service de ce type. Fairtiq calcule a posteriori le billet le moins cher, sur la base du trajet parcouru. Un musée peut proposer des informations soit sur la base d’œuvres d’art, soit sur celle de la position des visiteuses et des visiteurs. L’application de documentation d’un endroit donné vise à permettre la documentation des réparations qui y sont requises pour pouvoir y accéder ultérieurement. La conservation des preuves après des accidents (photos avec des coordonnées GNSS) entre aussi dans cette catégorie. Selon le type d’application con cerné, on se tournera plutôt vers le positionnement (par exemple celui de l’appareil photo) ou la localisation (par exemple pour une appli de documentation d’accidents localisant l’appareil considéré). A titre d’exemple de perception d’émoluments, on peut citer le paiement automatique d’un droit de péage autoroutier en fonction du nombre de kilomètres parcourus. La localisation peut se fonder ici sur différentes technologies comme la photographie de la plaque minéralogique, le recours à un lecteur RFID ou à un récepteur GNSS. Bien qu’il soit possible de se localiser soi-même, la localisation par un tiers est presque Savoir où – dedans comme dehors. Positionnement et navigation en intérieur 11 / 48
exclusivement retenue pour les systèmes automatiques, pour des raisons de sécurité (manipulation éven tuelle de données) et pour établir des statistiques. La même évaluation des risques a été entreprise pour l’appli Swiss Covid : les données de position auraient permis une exploitation plus poussée des données, mais l’appli aurait certainement été moins bien acceptée, les données de position sensibles ayant alors été partagées avec les exploitants de l’appli. La liste des applications n’est pas complète, elle vise simplement à donner un aperçu des possibilités ré sultant de la géolocalisation. 3.2. Exigences envers l’application Lorsque l’on planifie une application, il faudrait d’abord se demander à qui elle est destinée et pourquoi. Les exigences les plus diverses en résultent. La Figure 3-3 et le Tableau 3-1 subdivisent les exigences en quatre catégories. Elles sont baptisées Coverage, il s’agit de la couverture et de la portée, Useability, notion qui recouvre la convivialité au sens le plus large du terme, Safety & Security, regroupant des thèmes tels que la sécurité, la disponibilité ou la protection des données, et enfin Installation & mainte nance. Les exigences devraient être discutées avec les parties prenantes, tout au moins avec les utilisatrices / utilisateurs et avec les informaticiens. Les modifications peuvent influer sur le but visé, le public ciblé et la solution. Une technologie adaptée ne devrait être choisie qu’à l’issue de cette harmonisation. Figure 3-3 : situation d’exigences possibles dans les quatre catégories baptisées Coverage, Useability, Safety & Se curity et Installation et maintenance Savoir où – dedans comme dehors. Positionnement et navigation en intérieur 12 / 48
Tableau 3-1 : exigences possibles, affectation aux thèmes et pistes pour développer ses propres réflexions
Exigence Catégorie Commentaires
Installation de Installation & Une infrastructure propre doit être installée pour certains sys
l‘infrastructure maintenance tèmes de positionnement. Elle a un coût et requiert du temps, il
faut du reste la renouveler périodiquement et assurer sa mainte
nance. Des bornes WiFi pourraient déjà être installées aux en
droits les mieux adaptés, de sorte qu’il faudrait vérifier les interac
tions entre les deux systèmes (existant et à mettre en place).
Existe-t-il des endroits où une installation est interdite, par
exemple parce que l’aspect extérieur du bâtiment pourrait être pé
joré ou pour des raisons de sécurité ? L’installation doit-elle être
homologuée ?
Si les appareils forment un réseau : comment est-il relié au réseau
du bureau et comment est-il protégé ? Qui assure la maintenance
de l‘infrastructure, quelles activités sont requises dans ce cadre et
à quelle fréquence ? Existe-t-il un outil de gestion facilitant le tra
vail ?
Durée de vie de Installation & Si aucune alimentation électrique directe ou aucune production
la batterie maintenance d’énergie n’est possible à proximité pour une infrastructure de po
sitionnement, alors il faut recourir à une batterie. Sa durée de vie
dépendra de la fréquence à laquelle elle est sollicitée. Plus l’acti
vité augmente, plus le besoin en énergie est important, mais la
position des utilisatrices et des utilisateurs peut alors être définie
avec une précision accrue.
Actualisation Installation & Des changements interviennent de temps à autre au niveau des
maintenance données, par exemple lorsque la construction est modifiée ou que
les signaux radio ou l’utilisation des locaux changent. Qui se
charge alors de la mise à jour des données ?
Si l’environnement électromagnétique subit des modifications :
est-il acceptable de prendre à nouveau les empreintes digitales ou
cela suppose-t-il une charge de travail trop lourde qu’il faudrait
donc éviter ? Les empreintes digitales peuvent-elles être actuali
sées en continu par les utilisatrices et les utilisateurs (crowd sour
cing) ?
Solution proprié Installation & Faut-il utiliser un standard ouvert, via lequel l’utilisateur n’est pas
taire captive maintenance lié à un producteur, ou est-il acceptable d’utiliser du matériel ou
(vendor lock-in) / des modèles de données propriétaires ? C’est important à la fois
normes et stan pour le modèle de données et pour le positionnement. La migra
dards tion des données d’un modèle de données vers un autre est pos
sible en principe, mais les différences entre structures peuvent la
rendre lourde et complexe.
Perturbations ré Installation & C’est surtout dans des zones électroniquement sensibles que le
ciproques maintenance / recours à des appareils électroniques ou à des technologies radio
Safety & Secu peut être restreint pour ne pas perturber des machines et des
rity équipements de mesure sensibles. C’est souvent le cas dans des
hôpitaux, mais c’est également possible dans des laboratoires ou
dans l’industrie.
Protection des Safety & Secu Des données sur le comportement des utilisatrices et des utilisa
données et droits rity teurs doivent-elles être recueillies, par exemple pour découvrir où
de la personna et quand un grand nombre de membres du personnel se retrou
lité vent (« hotspot analyse ») ? L’écart entre amélioration du service
et surveillance du personnel est particulièrement ténu ici. Une
Savoir où – dedans comme dehors. Positionnement et navigation en intérieur 13 / 48Exigence Catégorie Commentaires
communication ouverte et un équilibre judicieux entre les béné
fices et les risques sont importants pour une mise en œuvre réus
sie. Souvent, le but visé peut aussi être atteint sans surveillance ;
le recours à davantage de technologie n’est pas forcément la
meilleure option.
Accès au cloud Safety & Où les données sont-elles stockées ? Les données des bâtiments
Security peuvent-elles être accessibles à tous, dans le monde entier, ou
doivent-elles être réservées au personnel ? Les forces d’interven
tion doivent-elles bénéficier d’un accès simple ?
Perturbations Safety & Que se passe-t-il si quelqu’un perturbe délibérément le système
Security de positionnement, par exemple avec un brouilleur ou en repro
grammant des capteurs ? De telles perturbations sont-elles pos
sibles, comment peuvent-elles être identifiées et/ou évitées ?
Quelles sont les conséquences d’une position dégradée ou com
plètement fausse ?
En ligne / hors Safety & Doit-il être possible d’utiliser également la solution hors ligne ou
ligne Security / Use une connexion Internet/Intranet est-elle impérative ? L’option hors
ability ligne est généralement plus rapide et dépend moins d’une bonne
connexion ou de serveurs fonctionnant bien, mais les données té
léchargées doivent être réactualisées de temps à autre. Le suivi
(selon la technologie employée) requiert plutôt une connexion, la
position actuelle ayant vocation à être partagée.
Précision Useability Quelle précision est exigée pour l’application ? Des indications ap
proximatives sont-elles suffisantes ou doivent-elles être de l’ordre
du cm ? Quels facteurs déterminent la précision ? Comment l’exi
gence de précision est-elle fixée ? Comment la précision et l’expé
rience des utilisateurs se combinent-elles ?
Interaction Useability Les besoins de personnes handicapées doivent-ils également être
couverts ? Dans ce cas, l’application devrait par exemple prendre
en charge des commentaires audio, voire accepter aussi l’entrée
en braille sur le téléphone portable. Des POI devraient être saisis
comme des points de repère, afin de permettre des commentaires
audio du type « suivez à présent le marquage jusqu’aux casiers ».
Terminaux Useability Si l’application doit être ouverte à toutes les utilisatrices et à tous
les utilisateurs, un téléphone portable récent (vieux de moins de
trois ans) devrait suffire. Attention : Android et iOS gèrent diffé
remment l’accès aux capteurs et aux interfaces et se comportent
donc différemment lors du positionnement. Un matériel plus spéci
fique est envisageable pour des applications particulières, mais il
doit être géré en plus pour le positionnement. Cette exigence a un
effet direct sur le choix de la technologie.
Intégration des Useability / Co La couverture doit-elle se limiter au seul espace intérieur ou doit-
espaces exté verage on pouvoir être guidé directement vers une salle de réunion de
rieur et intérieur puis l’extérieur ?
Couverture (par Coverage Quelle surface doit pouvoir être couverte par un appareil / un cap
unité) teur de position ? Si le bâtiment ou le secteur entier doit être cou
vert, de combien d’unités faut-il disposer ? Ce nombre varie-t-il en
fonction de la structure du bâtiment (en béton, en bois, etc.) ?
Disponibilité Coverage Le système peut-il être utilisé dans le monde entier ou est-il limité
(dans le monde à certains pays ? Si un système doit fonctionner dans le monde
entier) entier, le nombre de technologies envisageables est très faible,
Savoir où – dedans comme dehors. Positionnement et navigation en intérieur 14 / 48Exigence Catégorie Commentaires
rares étant celles qui sont certifiées et livrables partout. En Eu
rope, les fréquences autorisées sont harmonisées, mais la ques
tion n’est pas réglée aussi clairement ailleurs.
Interfaces Useability, Sa Des interfaces vers d’autres applications telles qu’Outlook ou
fety & Security map.geo.admin.ch sont-elles requises ? Les données doivent-
elles être mises à la disposition d’autres applications via une API
(Application Programming Interface, interface technique) ? Existe-
t-il une interface vers le service de position du système d’exploita
tion par exemple pour une navigation fluide dans Google Maps ?
Vue Useability Quelle vue est attendue par les utilisatrices et les utilisateurs ?
Qu’est-ce qui convient le mieux, une vue en 2D ou en 3D ? La re
présentation doit-elle plutôt tenir du plan abstrait ou de la carte
précise ? La visualisation, sous forme de carte au trésor par
exemple, est-elle adaptée pour l’entreprise concernée ?
3.3. Technologies
La Figure 3-4 et le Tableau 3-2 présentent certaines technologies7 revêtant de l‘intérêt pour le positionne
ment en intérieur.
Figure 3-4 : technologies pour le positionnement en intérieur, précision en abscisse, couverture en ordonnée, sur le
modèle de (Mautz, 2012).
Pour faciliter le classement des technologies, la zone d’intérêt pour l’espace intérieur a été colorée en
jaune. Des technologies d’une précision de quelques centimètres voire mieux sont requises pour des ap
plications spéciales, cas par exemple des installations industrielles automatisées. Des précisions de cet
ordre ne sont généralement pas nécessaires pour le positionnement de personnes.
Les technologies en vert clair sont largement répandues sur les téléphones portables et n’ont besoin d’au
cun matériel supplémentaire. C’est une exigence pour de nombreuses applications. La couverture et la
7
Bibliographie complémentaire pour les différentes technologies : (Mautz, 2012), (Hilty, et al., 2012), (esri, 2020).
Savoir où – dedans comme dehors. Positionnement et navigation en intérieur 15 / 48précision peuvent varier très fortement de l’une et l’autre : pour le WiFi, elles dépendent par exemple de la
fréquence à laquelle une application peut demander les points d’accès possibles pour le téléphone et du
nombre total de tels points disponibles. Si l’on marche à une vitesse de 1,4 m/s, on a parcouru 7 m si
l’intervalle de temps entre deux requêtes successives est de 5 secondes. Si le GNSS différentiel est entouré
en rouge, c’est parce que le service de positionnement swipos proposé par swisstopo se fonde sur lui.
Tableau 3-2 : vue d’ensemble des technologies de positionnement en intérieur. La couverture se rapporte toujours à
la portée d’un seul nœud. Adapté de (Mautz, 2012).
Technologie Préci Portée Méthode de mesure type Application type
sion type (m)
type
Caméra 0,1 mm- 1-10 Mesures d’angles à partir de Métrologie, navigation de ro
dm photos, reconnaissance bots
d’image (QR Code)
Infrarouge cm-m 1-5 Procédés à images ther Preuve de la présence de
miques, balises actives personnes, suivi
Son cm 2-10 Distance via le temps de par Hôpitaux, suivi
cours, reconnaissance de mes
sages
WiFi m 20-50 Fingerprinting (empreinte digi Navigation de piétons, ser
tale) vices géodépendants (LBS)
RFID dm-m 1-30 RSSI, voisinage, fingerprinting Navigation de piétons, suivi
d’actifs
Ultra-Wide cm-m 1-50 Réflexion, temps de parcours Robots, automatisation
band du signal
GNSS 10 m ‘global’ Distance via le temps de par LBS
cours
GNSS diffé cm ‘national’ Distance via le temps de par Mensuration, BTP, agriculture
rentiel cours
Pseudolites cm-dm 10-1000 carrier phase ranging (distance Mines à ciel ouvert avec mau
via la phase de la porteuse) vaise réception GNSS
Autres fré m 10-1000 fingerprinting, voisinage Suivi de personnes
quences ra
dio
Bluetooth m-10 m 10-30 fingerprinting, RSSI, voisinage Preuve de la présence de per
sonnes, suivi, navigation de
piétons, LBS
GSM 100-500 1-20 km cellID Location Suivi (d‘actifs)
m
Navigation 1% 10-100 dead reckoning Navigation de piétons
inertielle
Systèmes mm-cm 1-20 fingerprinting, mesure de dis Hôpitaux, mines
magnétiques tances
3.3.1. GNSS et pseudolites
Si les pseudolites (de pseudo et satellites) émettent un signal pour le positionnement, tout comme les
satellites GNSS, ils se trouvent toutefois sur la Terre. Les pseudolites seraient pratiques, car le signal est
identique à celui des satellites GNSS, si bien qu’aucun traitement supplémentaire ne serait à entreprendre.
Savoir où – dedans comme dehors. Positionnement et navigation en intérieur 16 / 48Vous pouvez aussi lire