Treuil pour parapente - Raoul Pahud Travail de Bachelor Juillet 2021 Destinataire : Ioan Balin
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous

Travail de Bachelor : Treuil pour parapente Raoul Pahud Systèmes Industriels, 3ème année Travail de Bachelor Juillet 2021 Destinataire : Ioan Balin Raoul Pahud Treuil pour parapente Page 1 sur 56

Table des matières 1. Introduction ..................................................................................................................................... 4 2. Glossaire .......................................................................................................................................... 4 3. Analyse des systèmes existants....................................................................................................... 4 3.1. Treuils mobiles à dévidoir ....................................................................................................... 5 3.1.1. Payout winch G8 .............................................................................................................. 5 3.1.2. Payout Winch « Eladia » .................................................................................................. 6 3.1.3. Mini Payout Winch .......................................................................................................... 6 3.1.4. 1 kW Payout Winch ......................................................................................................... 7 3.2. Treuils mixtes........................................................................................................................... 7 3.2.1. eWinch – 4 modèles ........................................................................................................ 7 3.3. Treuils fixes .............................................................................................................................. 8 3.3.1. Treuils construits à partir de systèmes existants ............................................................ 8 3.4. Conclusion ............................................................................................................................... 9 4. Théorie............................................................................................................................................. 9 4.1. Définition de la portance et explication du phénomène ........................................................ 9 4.1.1. Théorème de Bernoulli .................................................................................................. 11 4.2. La portance ............................................................................................................................ 12 4.3. La traînée ............................................................................................................................... 13 4.4. La résultante des forces aérodynamiques ............................................................................ 14 4.5. Termes aérodynamiques ....................................................................................................... 15 4.6. La finesse ............................................................................................................................... 16 4.7. La polaire d’une aile .............................................................................................................. 17 4.8. Vol treuillé ............................................................................................................................. 18 4.8.1. Treuillage fixe ................................................................................................................ 18 4.8.2. Treuillage mobile ou à dévidoir ..................................................................................... 20 4.8.3. Comparaison tracté-treuillé .......................................................................................... 22 5. Spécifications du treuil fixe ........................................................................................................... 24 5.1. Electriques ............................................................................................................................. 24 5.2. Mécaniques ........................................................................................................................... 24 5.3. Usages ................................................................................................................................... 24 5.4. Sécurité .................................................................................................................................. 24 5.5. Général .................................................................................................................................. 24 6. Catalogue des solutions du treuil fixe ........................................................................................... 24 6.1. Motorisation .......................................................................................................................... 24 Raoul Pahud Treuil pour parapente Page 2 sur 56
6.2. Système de freinage .............................................................................................................. 25 6.3. Guide-câble............................................................................................................................ 25 6.4. Système de réglage de la tension .......................................................................................... 27 6.4.1. Treuil mobile.................................................................................................................. 27 6.4.2. Treuil fixe ....................................................................................................................... 27 6.5. Système de largage ............................................................................................................... 28 6.6. Système de rembobinage du câble ....................................................................................... 29 6.7. Système d’enroulement du câble sur la bobine .................................................................... 29 7. Dimensionnement ......................................................................................................................... 29 7.1. Hypothèses ............................................................................................................................ 29 7.2. Fonctionnement global du système ...................................................................................... 29 7.3. Puissance ............................................................................................................................... 30 7.3.1. Conclusion ..................................................................................................................... 38 7.4. Moteur................................................................................................................................... 38 7.5. Transmission .......................................................................................................................... 39 7.6. Système d’engrenages .......................................................................................................... 44 7.7. Bobine.................................................................................................................................... 45 7.8. Câble ...................................................................................................................................... 49 7.9. Guide-câble............................................................................................................................ 50 7.10. Coupe-câble/Système guillotine ....................................................................................... 50 7.11. Mesure de la tension du câble .......................................................................................... 51 7.12. Châssis ............................................................................................................................... 51 7.13. Système de freinage .......................................................................................................... 51 8. Conclusion et améliorations .......................................................................................................... 52 9. Remerciements ............................................................................................................................. 52 10. Table des illustrations................................................................................................................ 53 11. Bibliographie.............................................................................................................................. 55 Raoul Pahud Treuil pour parapente Page 3 sur 56

1. Introduction Ce travail de Bachelor dit TB a pour but de conceptualiser et fabriquer un treuil pour parapente. En règle générale, un treuil pour parapente est utilisé pour faire décoller un parapente sur un terrain plat, puis prendre de la hauteur. Il peut aussi être utilisé sur un lieu de décollage en pente en montagne lorsque la vitesse et/ou la direction du vent ne sont pas appropriés pour un décollage normal sans treuil. Le but de ce TB était de conceptualiser deux treuils. Un serait minimaliste et muni uniquement d’un petit moteur de rembobinage, pour donner un ordre d’idée, 200 W sont suffisantes. La puissance et la vitesse sont fournies par un véhicule roulant ou flottant et il ne faudrait dimensionner uniquement un frein pour gérer la tension dans le câble. Ce genre de treuil est nommé treuil mobile ou à dévidoir. L’autre serait un treuil fixe. Par rapport au premier, le fil est préalablement déroulé avant le treuillage. Alors que pour le premier le fil se déroule pendant le treuillage, ici, le fil est rembobiné. La puissance et la vitesse sont fournies par un moteur plus puissant. Pendant le TB, j’ai réalisé qu’il serait difficile de conceptualiser et fabriquer ces deux treuils. Etant moi- même instructeur de parapente au sein d’une école, je me suis décidé pour le treuil fixe qui est un engin redoutable pour les initiations et apprendre à voler. Cet engin permet de faire plusieurs simulations de décollages et atterrissages sur un même terrain dans un court laps de temps. Le but n’est donc pas de faire un treuil très puissant qui permette d’élever très haut les parapentistes, mais d’avoir un treuil qui peut les élever autour des 30 à 50 mètres par rapport au sol. 2. Glossaire Au préalable, il est nécessaire de définir certains termes techniques. • Treuil : Appareil de levage et de chargement, composé d’un cylindre (tambour) qu’on fait tourner sur son axe à l’aide d’une manivelle ou d’un moteur et autour duquel s’enroule une corde, un câble. Dans le domaine du parapente, le treuil servira à faire décoller ou aider au décollage sur un sol plat ou non un parapente qui est fixé en bout de câble. • Treuillage : Utilisation d’un treuil pour soulever ou tirer une charge. • Treuiller : Manipuler à l’aide d’un treuil • Treuil fixe : Le treuil est immobile et fixe en un point. Le câble est préalablement déroulé avant utilisation. Lors du treuillage, le câble est enroulé et permet au parapente de décoller. Plus le déroulement préalable est grand, plus le parapente aura l’occasion de s’élever. • Treuil mobile ou treuil à dévidoir : Dans ce cas, le treuil est mobile, sur un véhicule, un bateau ou une voiture par exemple. C’est la force et/ou la vitesse du véhicule qui permet au parapente de décoller et de s’élever. Lors du treuillage, le câble est déroulé, ce qui permet au parapente d’aller toujours plus haut. • Treuil mixte : Ce treuil a la possibilité de fonctionner en mode fixe ou mobile. 3. Analyse des systèmes existants Dans ce chapitre, il est proposé de faire une étude afin de déterminer ce qui existe déjà sur le marché, ce qui peut être amélioré et surtout ce qui peut être conceptualiser pour trouver d’autres parts de marché. Dans cette étude, il a été complexe de trouver les informations relatives aux treuils et aux systèmes existants. Raoul Pahud Treuil pour parapente Page 4 sur 56

3.1. Treuils mobiles à dévidoir Dans cette catégorie, ce sont les treuils mobiles qui sont abordés. Cette catégorie a la chance d’utiliser un petit moteur uniquement pour le rembobinage. Cependant, il faut aussi un certain espace comme un grand plan d’eau si le treuil est installé sur un bateau ou une longue route s’il est fixé à une voiture. 3.1.1. Payout winch G8 Figure 1: Payout winch G8 déplié et pliéi Le Payout Winch G8 est un treuil à dévidoir conçu pour avoir une efficacité indéniable et pour effectuer un maximum de treuillages à l’heure. Dimensions plié 560 x 480 x 330 mm Dimensions en fonctionnement 1080 x 480 x 330 mm Masse 53 kg Surface de montage Surface plate ou boule de remorquage Gamme de tension (Réglée électroniquement) 0-130 daN Puissance moteur de rembobinage 1.5 kW Détection de ligne connectée Oui Capacité de longueur de ligne 1600 m (Dyneema 2.5mm) Batterie du véhicule recommandée (bateau ou ≥55 Ah voiture) Système de coupage de ligne instantané Oui (Guillotine) Altitude maximale de treuillage 1100 m Température d’utilisation -20 à +35 °C Prix 6'000 € Prix – 1600m, Dyneema 2,5mm 640 € Prix – Adaptateur boule de remorquage 120 € Prix – Aile de récupération avec drogue chute en 150 € bout de câble Tableau 1: Caractéristiques du Winch G8 Raoul Pahud Treuil pour parapente Page 5 sur 56
3.1.2. Payout Winch « Eladia » Figure 2: Treuil "Eladia"ii Masse 40 kg Dimensions en fonctionnement 600 x 500 x 400 mm Surface de montage Surface plate ou boule de remorquage Puissance de treuillage 30 – 200 kg Puissance moteur de rembobinage 1,7 kW, 12V Vitesse de rembobinage 1050 m/min Batterie recommandée du véhicule >50 Ah Système de coupage de ligne instantané Non (Guillotine) Durée de vie de la pompe hydraulique 100'000 treuillages Température d’utilisation -5 à 40 °C Capacité de longueur de ligne 1300 m (Dyneema 3mm) Prix – Sans la ligne 1'500 € Tableau 2: Caractéristiques du treuil "Eladia" 3.1.3. Mini Payout Winch Figure 3: Mini Payout Winchiii Raoul Pahud Treuil pour parapente Page 6 sur 56
Je n’ai trouvé que très peu d’informations sur ce treuil. Ce qui est intéressant, c’est son prix de 299 $. Il est rembobiné manuellement à l’aide d’une visseuse. La tension est constante dès le début du treuillage et peut provoquer un à coup au départ du véhicule. Ce treuil est trop fragile et le câble n’est pas très approprié. Il faut garder son aspect simple et peu coûteux. 3.1.4. 1 kW Payout Winch Figure 4: 1 kW Payout Winchiv Il n’y a pas non plus beaucoup d’informations sur ce treuil. Celui-ci dispose d’un moteur de rembobinage de 1 kW et son prix est de 999 $. Tout comme le treuil précédent, il est composé de pièces en imprimante 3D qui sont fragiles et peu résistantes à l’usure. Néanmoins, son fonctionnement est très simple. 3.2. Treuils mixtes Les treuils mixtes sont bien évidemment plus polyvalents que ses deux cousins, puisqu’ils peuvent être utilisés en mode fixe ou en mode mobile. Ils sont même parfois utilisés sur un même treuillage en dévidoir au début et en fixe pour la fin avant le largage du fil de tracté. Dans cette catégorie, seulement un treuil est vraiment connu. 3.2.1. eWinch – 4 modèles Figure 5: Treuil "eWinch"v Raoul Pahud Treuil pour parapente Page 7 sur 56

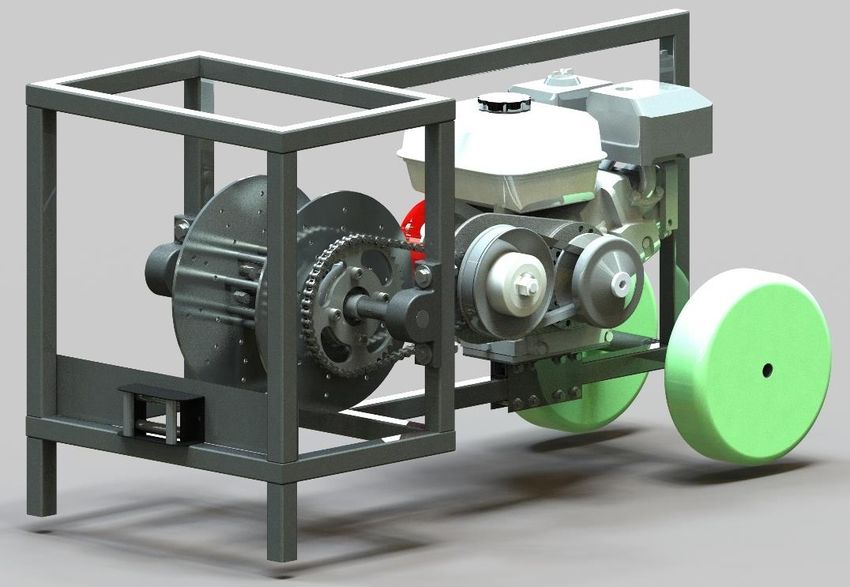
Pour le treuil eWinch, il y a 4 modèles. C’est leur puissance qui les différencie. Masse 19 kg – 28 kg – 28 kg – 35 kg Dimensions en fonctionnement Non connues Surface de montage Support de montage au sol ou boule de remorquage Moteur Electrique Puissances de treuillage et rembobinage 6 kW – 10 kW – 10 kW – 15 kW Batterie Lithium 72V 30Ah Système de coupage de ligne instantané Oui (télécommandé) (Guillotine) Température d’utilisation 0 à 40°C Capacité de longueur de ligne 2'000m Auto-treuillage Possible Prix – Sans la ligne et sans batterie 4'895 $ - 5'995 $ - 5'995 $ - 6'995 $ Prix - Batterie 1'250 $ Tableau 3: Caractéristiques des 4 modèles de treuil "eWinch" 3.3. Treuils fixes Dans cette catégorie, il n’existe pas de treuil reconnu à proprement dit. Ils ont tous été fabriqués artisanalement par des passionnés pour leur propre usage. Il n’y a donc pas de données sur ces treuils. Néanmoins, je vous cite quelques exemples pour représenter les engins existants. 3.3.1. Treuils construits à partir de systèmes existants Les images ci-dessous représentent ce que font les fabricants de treuils. Ceux-ci sont aussi souvent les utilisateurs de leur propre treuil. Sur la première image, le treuil a été fabriqué à partir d’un mécanisme existant. Dans ce cas, c’est un scooter qui a été modifié. La roue avant a été enlevée et remplacée par un système de guidage du fil, tandis que la roue arrière a été remplacée par la bobine de fil. Moteur, embrayage, démarreur, poignée de gaz, siège et freins ont été gardés. La force de tension est souvent contrôlée « au feeling » du treuilleur. Figure 6: Treuil fixe à partir d'un scooter 125ccvi En ce qui concerne le second treuil, celui-ci est beaucoup plus gros et plus puissant bien qu’il n’y a pas données techniques dessus. Celui-ci est créé de toute pièce et n’est pas basé sur un mécanisme ou Raoul Pahud Treuil pour parapente Page 8 sur 56

engin existant. Il est intéressant puisqu’il est transportable avec une voiture munie d’un crochet d’attelage. Néanmoins, il est très encombrant. Figure 7: Treuil sur remorque avec moteur électrique alimenté par un groupe électrogènevii 3.4. Conclusion De cette étude de marché se dégagent plusieurs constats : • Les treuils à dévidoir et mixtes sont puissants (6-15kW) mais chers (>1'500.-) • Les treuils mixtes sont la plupart du temps électriques et nécessitent une batterie externe qui doit être rechargée fréquemment • Les treuils fixes sont de fabrication dite maison et il n’existe aucun treuil de série en vente. Par conséquent, je vois mon travail s’orienter sur deux treuils différents : • Un treuil de type dévidoir low-cost (environ 500.-) avec un système pour le rembobinage • Un treuil fixe simple et transportable dans le coffre d’une voiture qui sera aussi à un prix le plus bas possible Après réflexion et expériences, j’ai réalisé ne pas avoir le temps de concevoir deux treuils différents. Etant moniteur de parapente, j’ai décidé de me consacrer au treuil fixe qui est un outil utilisé pour les initiations et apprendre à voler en parapente. C’est généralement le moniteur qui est treuilleur. Les spécifications du treuil fixe seront données prochainement. 4. Théorie 4.1. Définition de la portance et explication du phénomène Il y a plusieurs théories qui expliquent ou tentent d’expliquer le phénomène de la portance. • Troisième loi de Newton : « Tout corps A exerçant une force sur un corps B subit une force d’intensité égale, de même direction mais de sens opposé, exercée par le corps B ». Si A est l’aile, et B l’air, alors Raoul Pahud Treuil pour parapente Page 9 sur 56

l’aile subit une force en réaction au mouvement de la masse d’air dû au déplacement de l’aile. Si l’air est dévié par le bas, l’aile est tirée vers le haut. »1 • Effet Coanda : « Attraction ou l’attachement d’un jet de fluide par une surface convexe sur laquelle il s’écoule. Le fluide suit la surface et subit une déviation avant de s’en détacher avec une trajectoire différente de celle qu’il avait en amont. »2 Figure 8: Démonstration de l'effet Coandaviii • Théorème de Kutta-Jukowski : « Il détermine la circulation autour d’un profil d’aile et permet donc d’en déduire sa portance. Quand un corps symétrique à forme lisse, comme un cylindre à section ovale, se déplace dans un fluide avec une incidence positive il y a deux points d’arrêt sur une section du corps, près du bord d’attaque sur l’intrados et du bord de fuite sur l’extrados. La circulation est nulle et il n’y a pas de portance. Si un profil avec un bord de fuite aigu démarre avec une incidence positive, les deux points d’arrêt se trouvent au début dans les mêmes positions que précédemment. Quand l’air qui passe sous l’intrados atteint le bord de fuite il doit contourner celui-ci pour aller vers le point d’arrêt supérieur. À cause du rayon de courbure nul, la vitesse devrait être localement infinie. À défaut de vitesse infinie, il y a une vitesse importante qui crée sur l’extrados, près du bord de fuite, un tourbillon appelé tourbillon initiateur. »3 Figure 9: Démonstration de l'effet Kutta-Joukowskyix Nous avons décidé d’éclaircir le phénomène de la portance en détail selon l’explication populaire donnée en aéronautique, soit selon le théorème de Bernoulli. 1 https://fr.wikipedia.org/wiki/Portance_(aérodynamique) (15.01.2020) 2 https://https://fr.wikipedia.org/wiki/Effet_Coand~a (15.01.2020) 3 https://fr.wikipedia.org/wiki/Théorème_de_Kutta-Jukowski 15.01.2020 Raoul Pahud Treuil pour parapente Page 10 sur 56
4.1.1. Théorème de Bernoulli Figure 10: Représentation des pressions statique et dynamiquex Sur la figure ci-dessus, le baromètre A représente la pression statique, le B la pression dynamique et le C la somme des pressions statique et dynamique. Dans le cas du dessus, la vitesse du vent dans le conduit est nulle. Les baromètres A et C affichent la même valeur. Par conséquent, la pression dynamique est nulle aussi. Dans le cas du dessous, la vitesse du vent dans le conduit est constante et non nulle. Le baromètre C indique une valeur supérieure à celle de A. La différence est manifestement la pression dynamique (B). La pression dynamique q se calcule suivant l’équation suivante : 2 = 2 Si l’on ne tient pas compte des pertes dues au frottement, la loi de Bernoulli s’applique à un tube de courant. Dans ce cas, nous constatons que la somme des deux pressions (baromètre C) est identique sur les deux sections différentes. Dans la grande section, la pression statique (A) est plus élevée et la pression dynamique (B) est plus faible que dans la petite section. Dans la petite section, la vitesse du flux est plus grande par l’effet de Venturi. Cela fait augmenter la pression dynamique et baisser la pression statique. D’après ce constat, nous pouvons en tirer la loi de Bernoulli : ( ) + ( ) = Raoul Pahud Treuil pour parapente Page 11 sur 56
Figure 11: Représentation de l'effet Venturixi Sur une même ligne de flux, la quantité de Bernoulli se conserve. 2 + + = 2 Où P est la pression en un point [Pa] ou [N/m2], ρ est la masse volumique en un point [kg/m3], V est la vitesse du fluide en un point [m/s], g est l’accélération de la pesanteur [N/kg] ou [m/s2], z est l’altitude du point considéré [m]. A la suite de cela, nous pouvons expliquer le phénomène de la portance. 4.2. La portance La portance est une force perpendiculaire au déplacement du fluide. Elle est créée par l’aspiration dans une zone de dépression formée sur le dessus du profil dessiné à cet effet. C’est la forme du profil notamment qui influence la vitesse de l’écoulement de l’air. Sur un profil d’aile, le flux d’air se sépare entre l’intrados et l’extrados. Par sa forme, le flux est accéléré sur l’extrados et souvent décéléré sur l’intrados. Un fluide accéléré crée une dépression et un fluide. Il y a donc une dépression sur l’extrados et une surpression sous l’intrados. Cela a pour effet "d’aspirer" l’aile vers le haut. C’est la naissance de la portance. Figure 12: Phénomènes sur l'aile ventiléexii La portance est calculée de la manière suivante : 1 = 2 2 Raoul Pahud Treuil pour parapente Page 12 sur 56
Dans cette équation, ρ représente la masse volumique du fluide soit approximativement 1,2 [kg/m3] pour l’air, Cz [−] le coefficient de portance (déterminé expérimentalement), S [m2] la surface projetée de l’objet dans le plan x-y, et V [m/s] la vitesse du fluide dans l’axe x. Figure 13: Diagramme des forces aérodynamiques sur une ailexiii Dans le cas d’un avion, c’est la traction de l’hélice qui génère la vitesse de l’aile et un vent relatif suffisant, créant ainsi de la portance. Dans le cas d’un parapente en vol en l’absence de vent, c’est la gravité qui nous entraîne vers le bas qui crée ce vent relatif comme le fera un avion qui plane avec le moteur à l’arrêt. 4.3. La traînée La traînée est la force s’opposant au mouvement d’un corps dans un fluide et est perpendiculaire à la portance. Elle est calculée de la même manière que la portance à la différence que le coefficient CX est celui de la traînée. 1 = 2 2 Figure 14: Diagramme des forces aérodynamiques sur une ailexiv L’influence de la forme sur le coefficient de traînée est non négligeable. Sur l’image ci-dessous, la forme de la goutte d’eau avec le vent relatif venant du bout arrondi vers la pointe a le coefficient le plus faible. C’est pour cela que la plupart des ailes ont une forme s’y rapprochant afin de réduire au maximum la force de traînée. Raoul Pahud Treuil pour parapente Page 13 sur 56
Figure 15: Coefficients de traînée selon la formexv 4.4. La résultante des forces aérodynamiques En vol rectiligne stabilisé, la résultante des forces aérodynamiques (RFA) est directement opposée et égale au poids total volant. La somme de la traînée et de la portance représente la RFA. Figure 16: Schéma des forces en vol rectilignexvi Toutes ces forces sont dépendantes les unes des autres. L’objectif pour accroître ses performances, étant d’optimiser celles qui ont un effet « positif », la portance et la vitesse et de limiter celles qui ont un effet « négatif », la traînée. Raoul Pahud Treuil pour parapente Page 14 sur 56
La vitesse air est la première des composantes entrant dans le phénomène qui nous intéresse puisque pour voler, nous avons vu qu’un aéronef a besoin d’un vent relatif créant la portance et la traînée et par conséquent la RFA. 4.5. Termes aérodynamiques • Portance : Force perpendiculaire à la direction de la vitesse qu’a un corps dans un fluide • Traînée : Force s’opposant au mouvement d’un corps dans un fluide • Résultante des forces aérodynamiques (RFA) : Somme de la portance et de la traînée • Centre de poussée/portance : Point d’application des forces aérodynamiques • Centre de gravité : Point d’équilibre de l’aile s’il était possible de la suspendre à ce point • Finesse : Rapport entre la portance et la traînée, aussi appelé rendement de l’aile Figure 17: Termes aérodynamiquesxvii • Intrados : Surface inférieure de l’aile • Extrados : Surface supérieure de l’aile • Bord d’attaque : Section avant du profil • Bord de fuite : Partie arrière de l’aile • Ligne de de corde : Ligne reliant le bord d’attaque au bord de fuite • Ligne de cambrure : Différence entre la corde et la corde moyenne • Angle d’incidence : Angle entre la corde du profil et le vent relatif Raoul Pahud Treuil pour parapente Page 15 sur 56
Figure 18: 3 angles importantsxviii 4.6. La finesse La finesse est le rapport entre la portance et la traînée. Elle donne la performance d’une aile. Elle est calculée de la manière suivante : ( ) ℎ = = = î é î é ( ) Raoul Pahud Treuil pour parapente Page 16 sur 56
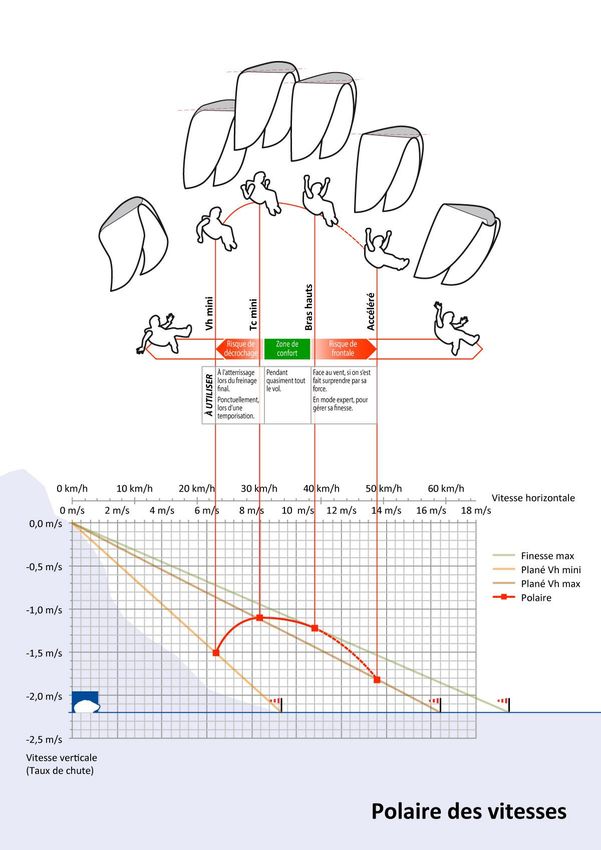
4.7. La polaire d’une aile La polaire d’une aile représente sa plage de vitesses. Sur le graphique ci-dessous, ce sont les vitesses horizontales et verticales qui sont représentées. Si la vitesse horizontale est divisée par la vitesse verticale, la finesse est obtenue. De plus, l’angle de finesse alpha peut être déterminé entre la verticale et la ligne tangente à la polaire passant par l’origine si les deux échelles sont identiques. Figure 19: Polaire d'une aile de parapentexix Raoul Pahud Treuil pour parapente Page 17 sur 56
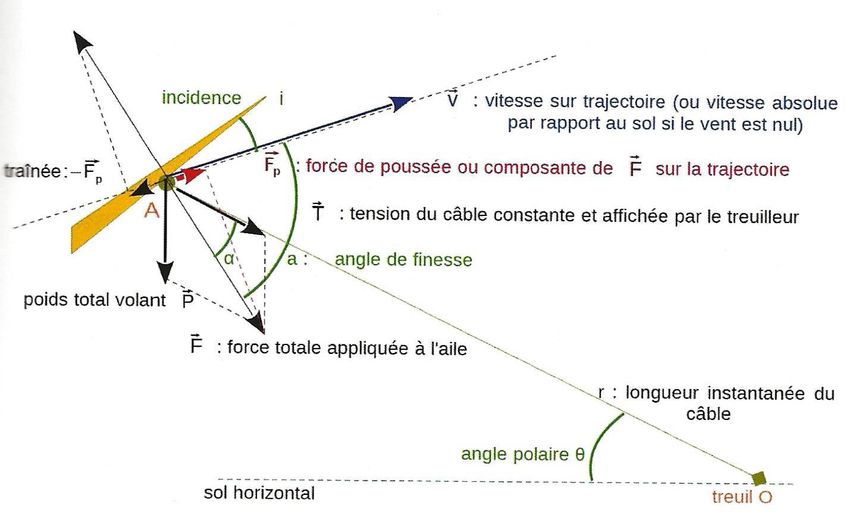
4.8. Vol treuilléxx Le vol treuillé permet de décoller depuis un terrain plat. La différence réside dans le fait que l’aéronef pourra s’élever. Ce n’est pas l’angle d’incidence qui est différent, mais l’angle d’assiette. La force de traction ajoute une contrainte supplémentaire sur l’aéronef, le facteur de charge. Celui-ci peut être très élevé selon la force de traction. Figure 20: Forces en vol treuilléxxi 4.8.1. Treuillage fixe Figure 21: Schéma des forces en treuillage fixexxii La tension T⃗ appliquée par le câble en A est évidemment dirigée de A vers O. Sa valeur est réglée par le treuilleur, plus l’aile monte, plus cette force tire vers le bas. Raoul Pahud Treuil pour parapente Page 18 sur 56
Le poids ⃗P à monter est évidemment le poids total aile et pilote. Il est toujours dirigé verticalement vers le bas. Nous pouvons sans inconvénient le supposé appliqué en A. La force totale ⃗F appliquée à l’aile est donc la somme vectorielle des deux forces précédentes. La construction de cette somme est visualisée par un parallélogramme qui se déforme en s’aplatissant ⃗ , résultante des forces lorsque l’aile monte. Cette force est équilibrée en permanence par la force F aérodynamiques du vent relatif sur le profil de l’aile. L’angle entre la trajectoire matérialisée par le vecteur v ⃗ , est appelé angle de finesse de ⃗ et la force F l’aile sur trajectoire : c’est l’angle a du schéma. La tangent de cet angle, soit tan(a), est appelé « finesse de l’aile », caractéristique célèbre et devenue un chiffre culte. Figure 22: Représentation des angles en treuillage fixexxiii L’angle polaire (le terme de polaire n’a strictement aucun rapport avec la courbe caractéristique de l’aile) θ est l’angle que fait le câble du treuil avec l’horizontale : la position de l’aile à un instant donné de la montée est entièrement connue si on connaît θ et la distance r entre l’aile et le treuil ; r et θ seront appelés coordonnées polaires de position ; ces coordonnées dépendent bien évidemment du temps t tout au long du treuillage. On introduira enfin l’angle α entre la force ⃗F véritable responsable de la traction et la direction générale ⃗ remplace donc le poids total volant qui était vertical dans le vol libre glissé ; lorsque l’aile du câble ; F monte, α diminue car le parallélogramme s’aplatit ; la figure suggère qu’il existe une relation organique entre les angles α et θ. Nous pouvons obtenir la tangente α par géométrie de la manière suivante : cos ( ) tan(∝) = xxiv + sin ( ) ⃗ observée dépend naturellement de la composante ⃗⃗⃗⃗ La vitesse v F de F⃗ suivant la trajectoire ; plus cette poussée est grande, plus l’aile va vite ; mais v ⃗ dépend aussi de l’incidence i donnée à l’aile par le pilote, qui a pour conséquence un certain angle de finesse de vol : ⃗ ,v = (F ⃗) Nous dirons que « a est réglé par i ». La relation entre a et i est d’ailleurs complexe, mais n’est pas nécessaire de la connaître puisque i résulte d’une action de pilotage ; i n’est pas un angle entre vecteurs ! L’incidence n’interviendra donc pas directement dans les calculs. Raoul Pahud Treuil pour parapente Page 19 sur 56
Sur le schéma vectoriel, nous voyons aussi que la projection de v ⃗ sur l’axe du câble est dirigée vers le treuil, ce qui est le cas général par vent nul : le câble diminue donc de longueur sous la tension du treuil, ce qui justifie ici la présence d’un moteur pour réaliser ce travail. Mais il peut être bien différemment lorsqu’un treuillage se déroule l’aile face à un vent météorologique ; nous verrons alors que la présence de vent est sans influence sur l’équilibre des forces appliquées à l’aile, mais peut en revanche influer considérablement sur la performance du treuillage : le treuilleur constate (sans rien y pouvoir directement) un enroulement moins rapide du câble voire même un dévidage. 4.8.2. Treuillage mobile ou à dévidoir Dans le treuillage mobile, le câble, sous l’influence d’une force, oblige le tambour au dévidage, lui communique une puissance et donc étalée dans le temps une énergie, dont le treuil usuel ne sait que faire ; celle-ci est convertie en chaleur dans le frein à frottement solide, à tambour ou à disque, dans un frein à frottement visqueux, frein à courants de Foucault, à huile ou à eau, ou encore dans un freinage aérodynamique. La question est alors : si l’aile et le treuil reçoivent tous les deux de l’énergie, qui ou quoi les fournit ? Réponse : l’atmosphère, le milieu dans lequel baigne l’aile, c’est-à-dire l’air ; c’est donc le vent qui fournit toute l’énergie nécessaire – comme il pourrait le faire à une éolienne : • À la lévitation de l’aéronef en lui communicant de l’énergie potentielle de pesanteur ; • Au travail de sa traînée qui est de l’énergie dégradée, ou chaleur, perdue par frottement aérodynamique ; • À la chaleur dissipée dans le frein du treuil qui est également de l’énergie perdue. Figure 23: Différence treuillages fixe et mobilexxv ⃗ se déplace dans le même sens que ce vecteur, soit dans le sens Lorsque le point d’application de T d’un enroulement du câble, la puissance positive ∗ indique que le treuil doit fournir de la puissance, donc que le tambour doit être mu par un moteur ; c’est au minimum le cas de tous les treuillages par vent faible. L’angle entre −F ⃗ et v⃗ étant supérieur à 90°, cela signifie que la puissance de la résultante aérodynamique est négative (elle vaut −F ⃗⃗⃗⃗ ∗ ), donc que le milieu atmosphérique reçoit de l’énergie de la part de l’aile, et que cette énergie est perdue sous forme de chaleur fabriquée par la traînée ; l’aile a reçu son énergie de la part du treuil ; c’est donc ici le treuil qui fournit tout. En treuillage par vent faible, il peut en revanche y avoir un certain partage : • Le treuil fournit la part principale de l’énergie ; Raoul Pahud Treuil pour parapente Page 20 sur 56
• L’atmosphère en mouvement – le vent – fournit le reste, disons la petite part ; • L’aile et son pilote collectent la somme des deux contributions précédentes pour leur plus grand bien. En treuillage par vent fort avec dévidage du câble, la part fournie par le treuil fixe peut disparaître, le vent fournissant alors la totalité de l’énergie. L’idée de base du treuillage au dévidoir est de conserver la tension du cordon ombilical en toute circonstance, en déplaçant le treuil initialement fixe dans un sens qui transforme l’enroulement du tambour en un dévidage, simulant ainsi le vent naturel qui n’existe pas : Figure 24: Schéma simplifié du treuillage en dévidoirxxvi • Il y a alors un dévidage du câble par rapport au tambour du treuil, qui correspond à la nécessité d’un freinage pour l’entretien de sa tension ; on pourrait imaginer ici un dispositif récupérant la puissance correspondante pour la transformer en énergie plus noble ; • Le véhicule lié au tambour fournit finalement la tension ⃗T du câble, mais comme celle-ci voit sont point d’application O se déplacer dans le même sens que le véhicule, c’est donc ce dernier qui fournit la puissance donc l’énergie nécessaire à l’ensemble de l’opération. Il n’y a donc pas de différence physique fondamentale entre le treuillé, appellation que nous réservons au treuil fixe et le tracté, appellation que nous réservons au treuil mobile sans moteur d’entraînement du tambour. On remplace simplement dans le tracté, le déplacement de la masse d’air (le vent) qui était suffisant pour entraîner le dévidage du tambour du treuil fixe, par son déplacement relatif, c’est-à-dire par un déplacement permanent du repère initialement fixe qu’était le treuil ; c’est donc dorénavant le treuil qui se déplace par rapport à la masse d’air, et non plus l’aire qui se déplace par rapport au treuil fixe. La vitesse de déplacement du treuil mobile doit donc être au moins égale à celle du vent qui entraînait le dévidage du treuil fixe, c’est-à-dire au moins égale à la plus faible valeur de la composante horizontale de la vitesse/sol de l’aile. La formule ⁄ conduit à la condition approximative : ⁄ ≈ 1 → ≥ xxvii Raoul Pahud Treuil pour parapente Page 21 sur 56
Ici, la vitesse de treuil et la vitesse de vol libre glissé de l’aile sont largement réglable, alors qu’au treuil fixe la vitesse du vent était totalement subie, et pouvait même être la cause d’une vitesse de pilotage plus ou moins forcée ! Figure 25: Schéma des forces en treuillage mobilexxviii La composition des vitesses exige une analyse attentive : le treuil est mobile par rapport au sol ; l’air (le vent) est mobile par rapport au sol et au treuil ; enfin l’aile est mobile par rapport à l’air, au treuil et au sol. Le schéma vectoriel donnant la vitesse relative ⃗⃗⃗ de l’aile par rapport au véhicule-treuil est la visualisation du principe de composition galiléenne des vitesses : ⃗⃗⃗ = ⃗V + ⃗⃗⃗ − ⃗⃗⃗ xxix Qui est à la base de l’analyse générale du tracté et de la figure ci-dessus. Cet outil de gestion montre que : • ⃗ , ⃗⃗⃗⃗ Pour permettre le déroulement du câble, il faut que l’angle (T V0 ) soit supérieur à 90° ; • Lorsque ⃗⃗⃗⃗ V0 devient perpendiculaire au câble, celui-ci ne déroule plus et la tension s’annule brusquement ; ceci n’est certes pas dangereux et l’aile retourne paisiblement au vol glissé ; mais attention au phénomène du coup de fouet qui peut être pallier en gardant une vitesse de dévidage suffisante ; • Pour diminuer l’angle polaire d’un câble qui serait « trop haut », il faut augmenter ⃗⃗⃗ jusqu’à ce que ⃗⃗⃗ ait une composante orthoradiale dans ce sens, ce qui correspondra assurément à une vitesse du véhicule-treuil d’autant plus grande qu’on veut un câble peu incliné ; pour laisser monter le câble, il suffit de ralentir. 4.8.3. Comparaison tracté-treuillé Si la mécanique du tracté-dévidoir est totalement analogue à celle du treuillé, il existe de profondes différences pratiques et logistiques entre ces 2 formes de motorisation auxiliaire. Les avantages du tracté-dévidoir sur le treuil fixe : Raoul Pahud Treuil pour parapente Page 22 sur 56
• Le tracté exige en principe un matériel plus simple quoiqu’il faille quand même prévoir de quoi rembobiner le câble sur le tambour après dévidage ; • La tension est réglée avec le frein du dévidoir ; si celui-ci est de type à disque ou à tambour, c’est-à-dire à frottement solide, la physique de ces frottements indique une grande indépendance du couple de freinage par rapport à la vitesse ; on peut considérer dans ce cas exceptionnel que la régulation de tension puisse être simplifiée, puisqu’elle consistera pour l’essentiel à assurer une pression constante dans le circuit hydraulique du frein ; autrement dit, l’asservissement de la tension du câble est un système qui n’a plus vraiment besoin d’être, ce qui ne veut pas dire que la tension ne doit pas être mesurée et affiché de façon visible ! • Le tracté-dévidoir permet, si la longueur de piste n’est pas comptée, et quelle que soit la faiblesse du vent, d’atteindre les altitudes fantastiques du vol quasi-stationnaire car la vitesse du véhicule-treuil peut être réglée : elle règle donc l’évolution angulaire du câble, ce qui confère au tracté un irremplaçable atout supplémentaire par rapport au treuil fixe ; • La communication véhicule-pilote peut se faire sans radio au décollage, ce qui constitue un atout en matière de sécurité, alors qu’au treuil fixe la longueur du câble au décollage pouvait se voir limitée pour garder un contact visuel suffisant. Les inconvénients du tracté-dévidoir sur le treuil fixe : • Il faut un conducteur de véhicule et un actionneur du frein de tambour surveillant de tension, soit 2 « treuilleurs » ; • Il faut un terrain « roulant », à défaut de l’utilisation d’un chemin carrossable ; la loi de Murphy prévoit alors que le vent sera toujours exactement perpendiculaire au chemin ; cependant, pas moins qu’avec un treuil fixe, il peut être bon de s’éduquer au décollage vent de travers pour ne pas rester perpétuellement clouer au sol ; après le décollage, le pilote aura le chois entre deux variantes : 1. Suivre l’aplomb du chemin en volant en crabe pour contrer le vent de travers, c’est la méthode incontestablement la moins intuitive pour garder un vol symétrique ; 2. Laisser dériver le plan vertical de treuillage jusqu’à se mettre dans le vent relatif pour monter avec l’axe de l’aile face au treuil ; c’est certainement le plus confortable pour le pilote. Conclusion : Ce n’est pas tant le principe physique de fonctionnement que le champ d’application qui distingue le tracté du treuillé : • Le treuil fixe motorisé est le treuil « tout terrain » ; • Le dévidoir mobile, plus délicat sur le choix de la surface opératoire, est en principe plus performant par son double réglage tension-vitesse. L’arme absolue facilement imaginable serait une combinaison des deux machines précédentes. Il y a toujours mieux, mais c’est plus cher. Raoul Pahud Treuil pour parapente Page 23 sur 56
5. Spécifications du treuil fixe Après réflexion et expériences, j’ai réalisé qu’il serait trop compliqué 5.1. Electriques N° Description Importance Min Nom Max Alimentation issue de la chimie Recommandée Interrupteur de mise sous/hors tension Obligatoire 5.2. Mécaniques N° Description Importance Min Nom Max Poids du dispositif [kg] Obligatoire 35 Encombrement du dispositif [cm] Obligatoire 50x50x100 Tension du câble constante et réglable Obligatoire 0 80 [kg] Système de freinage automatique Recommandée Rembobinage motorisé du câble Obligatoire Système de trancannage Recommandée 5.3. Usages N° Description Importance Min Nom Max Un seul opérateur du treuil Obligatoire Aucune formation nécessaire à l’emploi Optionnelle Indication de la tension du câble Recommandée 5.4. Sécurité N° Description Importance Min Nom Max Coupe-câble instantané Obligatoire Largage manuel Obligatoire Confirmation visuelle de largage effectué Obligatoire Visuel du pilote depuis la place de Recommandée l’opérateur 5.5. Général N° Description Importance Min Nom Max Prix total du dispositif [CHF] (coût du Recommandée 550 matériel uniquement sans la fabrication) 6. Catalogue des solutions du treuil fixe 6.1. Motorisation Pour la motorisation, il y a 2 possibilités envisageables, le moteur électrique et le moteur à explosion. Il est intéressant de mettre les avantages et inconvénients de chacun. Raoul Pahud Treuil pour parapente Page 24 sur 56
Moteur à explosion Moteur électrique Avantages • Faible coût (environ 200CHF • Silencieux pour 5 kW) • Peu d’entretien • Facilité d’installation • Pas de rejet de CO2 à l’utilisation • Simple à piloté Inconvénients • Bruyant • Impact des batteries • Entretien • Contrainte de la recharge 6.2. Système de freinage En ce qui concerne le système de freinage, il n’y a pas besoin d’un système dissipant beaucoup d’énergie. En effet, le frein servira uniquement à interrompre le treuillage en cas de problème ainsi qu’à éventuellement créer du frottement lors du déroulement du câble évitant de cette manière des spires inopinées. En clair, beaucoup de systèmes pourraient être adéquats. Les aspects les plus importants seront le prix, la durabilité et l’entretien que le système demande. Dans ce registre, les freins suivants pourraient être utilisés : • Freins sur jante o Étriers • Freins sur moyeux o Freins à disque o Freins à tambour • Freinage magnétique • Frein à frottement réglable o Moulinet de pêche Dans ces divers freins, les freins sur moyeux à tambour et les freins à frottement réglable sont éliminés par leur complexité. Le freinage magnétique est trop cher et complexe pour l’usage recherché. Les freins utilisés seront donc des freins à disque avec des étriers de frein, commandés hydrauliquement ou mécaniquement. 6.3. Guide-câble Pour le guide-câble, j’ai deux solutions à proposer. Il y a tout d’abord une simple plaque usinée avec une poche ouverte à travers laquelle le fil passe. Celui-ci serait en métal avec un bon coefficient de glissement. Ensuite, il y a un guide-câble à 4 rouleaux qui minimise le frottement du câble grâce à la rotation de ces rouleaux. Raoul Pahud Treuil pour parapente Page 25 sur 56
Figure 26: Guide-câble simple avec poche Le guide-câble ci-dessus a l’avantage d’être simple à fabriquer et à monter. Cependant, le frottement est élevé et à long terme, le câble risque de pénétrer la matière et de se retrouver brûlé, affaibli, voire coupé. Figure 27: Guide-câble à rouleauxxxx Le guide-câble à rouleaux diminue fortement les frottements grâce à ses rouleaux tournants. Par conséquent, le câble est mieux préservé. Il est cependant plus complexe à fabriquer, mais il y en a qui sont à bas prix dans le commerce. Il faut voir selon les dimensions finales de la bobine et du treuil. Ce guide câble est monté soit avec des roulements, soit avec des paliers lisses. Guide-câble simple (Gorge) Guide-câble à rouleaux Avantages • Peu coûteux • Préserve le câble • Facile à usiner • Facile à monter • Facile à monter • Résistant Inconvénients • Usure • Compliquer à fabriquer • Affaiblissement du câble • Plus lourd Raoul Pahud Treuil pour parapente Page 26 sur 56
6.4. Système de réglage de la tension 6.4.1. Treuil mobile Comme indiqué dans la théorie, c’est la tension qui donne le rendement lors d’un treuillage. Dès lors, il est intéressant de pouvoir connaître la tension à un moment donné et la gérer. Pour le réglage de la tension, il peut y la possibilité d’avoir un système d’affichage donnant la tension instantanée dans le câble et que celle-ci soit gérée de façon instinctive par l’opérateur du treuil ou plutôt directement par un système de régulation autonome. Des systèmes connus gérant la tension sont les freins des moulinets de pêche et le système de réglage de tension dans la machine à coudre. Dans le frein du moulinet, le réglage consiste en un empilement de rondelles en métal et en feutrine. Celles-ci sont plus ou moins comprimées par la vis de serrage. Plus elle est serrée, plus il y a de frottement et donc de tension. La tension est gérée au « ressenti » du pêcheur. En effet, celui-ci va tirer sur le fil à l’aide de sa main et le fil doit se dérouler librement avec une force constante. Figure 28: Explosé d'un frein de moulinet de pêchexxxi Dans le cas de la machine à coudre, le système est plus complexe. Il y a la tension du fil supérieur ainsi que celle du fil inférieur. La tension du fil inférieur est gérée par la vis de réglage de la cannette dans laquelle la bobine se trouve. La tension du fil supérieur est quant à elle gérée par un pincement du fil entre deux plaques en métal avec des ressorts. Cette tension est régulée la plupart du temps par une molette manuelle. D’une part, le problème est que ces deux systèmes permettent uniquement d’avoir une tension constante et sont utilisables seulement pour un treuil mobile. 6.4.2. Treuil fixe Dans le cas d’un treuil fixe, il doit être possible de changer la tension instantanément pour avoir le rendement ou l’effet escompté. D’autre part, pour le frein du moulinet, il n’y a pas de moyen simple de connaître la tension exercée et pour la machine à coudre, le fait de pincer le fil entre deux plaques Raoul Pahud Treuil pour parapente Page 27 sur 56
Vous pouvez aussi lire