BTS INFORMATIQUE ET RESEAUX
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
LYCEE TECHNIQUE REGIONAL DORIAN
BTS INFORMATIQUE ET RESEAUX
POUR L’INDUSTRIE ET LES SERVICES TECHNIQUES
BTS INFORMATIQUE ET RESEAUX
MÉMOIRE DE FIN DE STAGE
Améliorations d’un outil de trajectographie
terrestre
par Olivier HARGOAA
Du 19 mai au 30 juin 2003
Directeur du stage: (Thierry PERSON, responsable de
l’unité des Travaux Spéciaux de l’IGN)
Unité des Travaux Spéciaux de l’IGN Saint-Mandé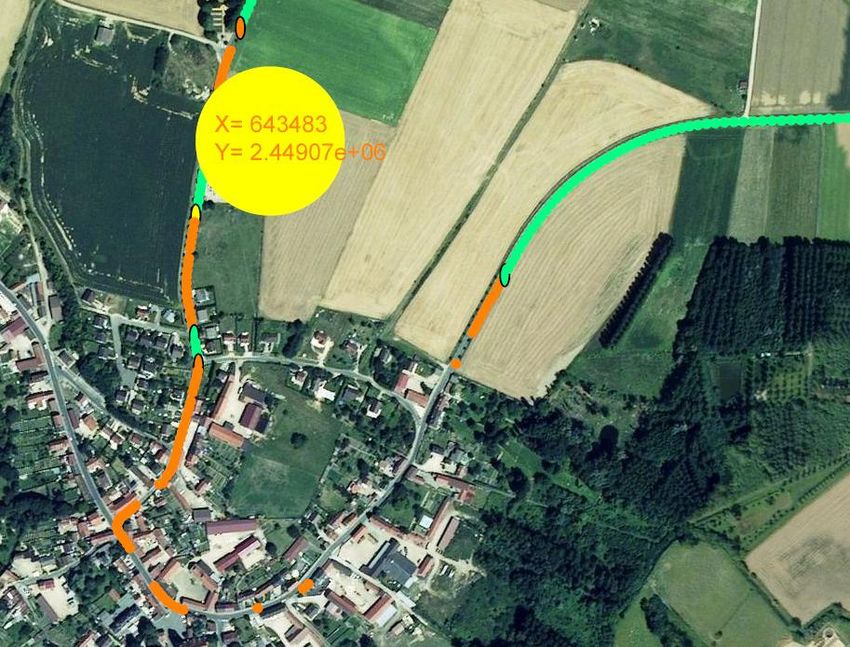
HARGOAA Olivier Remerciements
REMERCIEMENTS
Je tiens à remercier vivement l’ensemble des personnels du Service de Géodésie et
Nivellement qui m’ont soutenu, aidé et conseillé.
Je remercie en particulier :
-Michel KASSER, chef du Service de Géodésie et Nivellement de m’avoir permis de réaliser
au sein de son service un projet parfaitement adapté avec ma formation.
-Thierry PERSON, chef de l’unité des Travaux Spéciaux et Valérie MICHEL, son adjointe,
pour leur accompagnement tout au long du stage
- L’ensemble des géomètres et techniciens de l’unité : Georgia ROESH, Laurent DELGADO,
Jean-Claude POYARD, Franck TERTRE, Céline CORBIERE, Sylvain DUMONT et Pierre
DAVIN qui m’ont aidé, dans la bonne humeur et à des degrés divers, dans mon entreprise
-Franck MARGELIDON stagiaire géomètre aux TS pour m’avoir apporté les connaissances
nécessaires sur la trajectographie afin que je puisse mener a bien mon projet.
- Stéphane KALOUSTIAN, et Eric FOURRESTIER pour leur aide sur la programmation.
Je remercie également chaleureusement les personnes des autres services de l’IGN , ainsi que les
stagiaires présents dans le service.
Mémoire de stage de BTS IRIS Page 1 sur 34
HARGOAA Olivier Table des matières
Table des matières
REMERCIEMENTS ............................................................................................................................... 1
Table des matières ................................................................................................................................... 2
Introduction ............................................................................................................................................. 3
1. Présentation de l’entreprise et du système de travail........................................................................... 4
1.1. Présentation de l’entreprise .......................................................................................................... 4
1.1.1. L’Institut Géographique National.......................................................................................... 4
1.1.2. Répartition du personnel........................................................................................................ 5
1.1.3. Les missions de l’institut géographique national : ................................................................ 5
1.1.4. Budget : ................................................................................................................................. 6
1.1.5. Organisation et place du service d’accueil : .......................................................................... 6
1.1.6. Le Service de Géodésie et de Nivellement (SGN) et la division des Travaux Spéciaux (TS)
......................................................................................................................................................... 8
1.1.7. Management et déroulement du stage : ................................................................................. 9
1.1.8. Contexte économique des travaux effectués pendant le stage :............................................. 9
1.2. Présentation générale des principes de la trajectographie terrestre ............................................ 10
1.2.1. Mode opératoire : ................................................................................................................ 10
1.2.2. Principe du positionnement par GPS :................................................................................. 10
1.3. Schéma des différentes étapes du traitement des signaux .......................................................... 11
2. Mise à jour et amélioration du logiciel Trajectographie 2002........................................................... 13
2.1. Présentation de trajectographie 2002 (Extrait de J.Farah).......................................................... 14
2.1.1. Présentation et objectifs....................................................................................................... 14
2.1.2. La conception du logiciel .................................................................................................... 15
2.2. Passage d’une trajectoire d’antenne à une trajectoire sol ........................................................... 18
3.2.1 Description et principe de fonctionnement du capteur à ultrasons :..................................... 18
2.2.1. La datation dans le référentiel de temps GPS des mesures du capteur à ultrasons : ........... 19
2.3. Evolutions pour Trajecto_2002 .................................................................................................. 20
2.3.1. La demande de l’IGN .......................................................................................................... 20
2.3.2. Mise à jour et améliorations ................................................................................................ 20
2.4. Conclusions ................................................................................................................................ 23
3. Création d’un logiciel de visualisation de trajectoires....................................................................... 24
3.1. Présentation des contraintes ....................................................................................................... 25
3.1.1. Fonctionnalités .................................................................................................................... 25
3.1.2. Performances demandées .................................................................................................... 26
3.1.3. Contraintes de réalisation .................................................................................................... 26
3.2. Réalisation.................................................................................................................................. 26
3.2.1. Analyse et code ................................................................................................................... 26
3.2.2. Le logiciel............................................................................................................................ 28
3.3. Les résultats................................................................................................................................ 29
3.3.1. Performances ....................................................................................................................... 29
3.3.2. Le SVG produit ................................................................................................................... 30
3.4. Conclusions et perspectives d’évolution .................................................................................... 31
Conclusion............................................................................................................................................. 32
Bibliographie......................................................................................................................................... 33
Table des annexes.................................................................................................................................. 34
Mémoire de stage de BTS IRIS Page 2 sur 34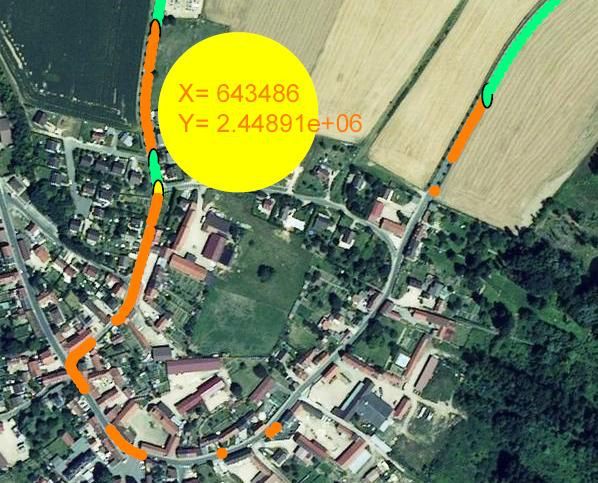
HARGOAA Olivier Introduction
Introduction
La technologie spatiale GPS (Global Positioning System) est aujourd’hui l’outil privilégié
pour se positionner avec une grande précision, et devient fondamental aussi bien pour les milieux
industriels (grands chantiers, auscultations d’ouvrages d’art) que pour les sciences de la Terre
(surveillance des risques naturels et quantification des mouvements tectoniques).
C’est dans le cadre originel de la surveillance d’affaissements miniers que l’unité des Travaux
Spéciaux de l’IGN a mis au point, au cours de l’année 2000, une nouvelle méthode de levé
altimétrique, dans la perspective de détecter les affaissements du sol avec une précision centimétrique.
La faisabilité, dans le cadre de travaux de recherches, d’une telle surveillance ayant été démontrée,
l’unité des Travaux Spéciaux cherche à rendre cette technique de trajectographie compatible à des
impératifs « industriels » et applicable à des objectifs variés (profil en long d’une route, complément à
de la photogrammétrie terrestre, détection d’affaissements miniers, …..).
Le système développé fait appel à une station GPS fixe et à un récepteur GPS embarqué sur un
véhicule couplé à un capteur à ultrasons. Le post-traitement des observations GPS permet de connaître
la position de l’antenne pour des fréquences d’observation variables (1 hz pour les récepteurs Z12 de
la marque Ashtech, 10 hz pour les Leica 530). Le capteur à ultrasons permet de connaître la hauteur
d’antenne du récepteur GPS embarqué à des fréquences allant de 5 à 25 hz..
Mon étude va s’articuler sur deux projets :
Correction d’erreurs et mise à jour du logiciel Trajecto_2002 utilisé pour la récupération des
données capteur et GPS. La mise à jour consiste à rendre le logiciel compatible avec des récepteurs
GPS Leica SR530 achetés en avril 2003 par l’IGN.
Création d’un logiciel capable rapidement de représenter les trajectoires venant d’être levées
de la manière la plus lisible possible en fonction de critères de qualités très précis de telle sorte que
l’utilisateur sache instantanément quelles portions de trajectoires il doit lever de nouveau afin
d’obtenir la meilleure trajectoire possible.
Mémoire de stage de BTS IRIS Page 3 sur 34
HARGOAA Olivier Première partie : Présentation
1. Présentation de l’entreprise et du système de
travail.
1.1. Présentation de l’entreprise
1.1.1. L’Institut Géographique National
Mémoire de stage de BTS IRIS Page 4 sur 34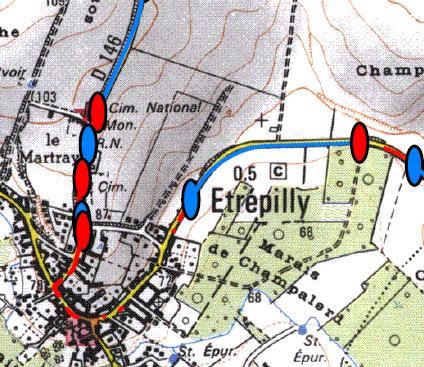
HARGOAA Olivier Première partie : Présentation
1.1.2. Répartition du personnel
1.1.3. Les missions de l’institut géographique national :
L'IGN a pour mission de service public de conduire les actions de recherche dans le domaine
géographique, d'assurer la formation initiale et continue des agents de l'Institut et de tenir à jour la
documentation géographique institutionnelle. Au delà de ces activités transversales, il a pour mission
Mémoire de stage de BTS IRIS Page 5 sur 34
HARGOAA Olivier Première partie : Présentation
fondamentale d'assurer la production, l'entretien et la diffusion de l'information géographique de référence
en France. L'ensemble de cette information est constitué par des référentiels géographiques de base
(géodésie, nivellement et photographies aériennes), et des référentiels géographiques élaborés (bases de
données numériques et fonds cartographiques).
1.1.4. Budget :
A la lecture de ce graphique présentant les recettes et les dépenses commerciales, on constate que la part
de budget apporté par l’Etat constitue pratiquement la moitié des recettes de l’IGN, les autres recettes
étant les gains de la vente de produits ou de services à tous ceux qui ne constituent pas le secteur public.
Contrairement à ce que l’on pourrait croire, la réalisation des cartes (visible sur le coté dépenses du
graphique sous le nom de secteur grand public) ne représente pas la plus grande partie des dépenses
commerciales puisqu’elle se place en seconde position juste après le secteur professionnel, qui lui,
consomme des services (demande de mesures pour la construction d’un ouvrage …).
L’IGN étant un service public, le déficit constaté pour l’année 2002 sera compensé par une augmentation
de la dotation de l’état.
1.1.5. Organisation et place du service d’accueil :
L’IGN présente la caractéristique d’intégrer quatre fonctions principales: formation, recherche,
production et commercialisation. Leur symbiose favorise le développement des compétences des
personnels et constitue une des composantes majeures de la culture de l’établissement.
L’IGN présente une structure fonctionnelle (hiérarchique par fonctions) avec des communications
verticales, ce qui a pour principal intérêt la simplicité au détriment de la vitesse des communications.
La direction générale est assurée par le PDG Monsieur Bertrand LEVY.
Mémoire de stage de BTS IRIS Page 6 sur 34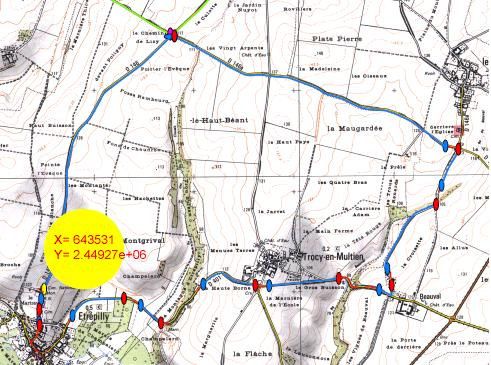
HARGOAA Olivier Première partie : Présentation Le service d’accueil est le service des Travaux Spéciaux contenu dans le service de géodésie et nivellement (encadré en rouge sur l’organigramme). Il est dirigé par Thierry PERSON et se compose d’une vingtaine d’ingénieurs et techniciens supérieurs géomètres. Mémoire de stage de BTS IRIS Page 7 sur 34
HARGOAA Olivier Première partie : Présentation
1.1.6. Le Service de Géodésie et de Nivellement (SGN) et la division des Travaux
Spéciaux (TS)
C’est un service de production dont la principale mission est l’établissement des réseaux
nationaux de géodésie et de nivellement. Il assure donc la référence en matière de positionnement sur
la surface du territoire français, des départements et des territoires d’Outre-mer.
Ses domaines d’activités sont :
La géodésie : avec les méthodes terrestres et spatiales (interférométrie, système DORIS, GPS..)
Le nivellement : avec l’établissement du Réseau Français de Nivellement de Précision.
La métrologie : contrôle d’ouvrages (ponts, bâtiments, …), surveillance de zones susceptibles de
subir des déplacements (versants instables, zones d’exploitations minières, contrôle en surface lors
de creusement de tunnels, …).
La documentation : maintient d’une base de données documentaire concernant les réseaux de
géodésie et de nivellement.
Expertise et formation : les ingénieurs du SGN participent activement aux demandes d’expertise
ou d’aide à la maîtrise d’ouvrage.
La division des TS intégrée dans le Service de Géodésie et de Nivellement, participe à des
tâches d’enseignement et intervient sur des projets scientifiques, des travaux publics et industriels. Elle
réalise des développements internes avec des partenaires et répond, régulièrement en urgence, aux
besoins les plus exigeants en topométrie et métrologie. Les interventions sont ponctuelles dans la
durée que ce soit en France ou à l’étranger, par des détachements d’ingénieurs capables de former et
piloter des équipes locales dans les domaines suivants :
L’aménagement urbain : densification géodésique,
Laboratoires : canevas d’appuis, positionnement, contrôles, métrologie,
Aviation : positionnements et orientations,
Edifices et grands travaux : guidage de constructions, mesures de déformations, canevas d'appui
planimétriques et altimétriques, implantations et contrôles,
Ouvrages d’art : suivi de grands ponts,
Mouvements de terrains : mesures de déformations,
Suivis sécuritaires : mesures de déformations en cours de travaux.
Les techniques maîtrisées sont diverses :
Géodésie, nivellement et métrologie, méthodes terrestres et spatiales (GPS),
Mesures instantanées et continues, statiques et dynamiques, absolues et différentielles,
Calculs géodésiques, analyses géométriques des résultats,
Production appuyée sur des systèmes de références précis, référencés dans une base de données
couvrant le monde entier.
Mémoire de stage de BTS IRIS Page 8 sur 34
HARGOAA Olivier Première partie : Présentation
1.1.7. Management et déroulement du stage :
Tuteurs de stage :
Thierry PERSON, directeur des travaux spéciaux (TS).
Franck MARGELIDON (Chef d’escadrons de l’Enseignement Militaire Supérieur
Scientifique et Technique ; DEA Science de l’information géographique à l’ENSG), Stagiaire
aux TS.
Déroulement du stage :
Ce stage a été conçu comme un stage individuel avec une grande autonomie à l'image des stages
proposés aux élèves ingénieurs-topographes du service.
Dès l'arrivée, familiarisation avec les techniques de géodésie (lecture de cours IGN sur le GPS
2 jours).
Premier projet (2 semaines).
Exposé d’introduction du 1er projet par le chef de service (2 heures).
Lecture du code et de la doc. laissée par le stagiaire précédent.
Acquisition "sur le tas" des bases du langage Delphi 6.
Montage du banc de test (PC + GPS + capteur + carte développée précédemment 4 heures).
Essai du programme existant et ajout des corrections nécessaires (5 jours).
Extension du logiciel aux nouveaux récepteurs GPS et création de l’aide du logiciel ( 1
semaine).
Deuxième projet (5 semaines).
Exposé d’introduction du 2ème projet par le chef de service (2 heures).
Etude du cahier des charges, choix de l'environnement de programmation (langage C++).
Etude des formats des données à intégrer au logiciel à créer.
Création du logiciel.
Réunion et exposé intermédiaire pour le service.
Recherche d'une méthode d'affichage : le SVG, et familiarisation avec ce langage pour le Web.
Réalisation complète du logiciel.
Tests concluants sur le terrain (pour les deux projets).
Réunion et exposé de fin projet pour le service.
Réalisation de l'aide pour le logiciel en utilisant le langage d'aide pour Windows.
Rédaction du mémoire pour l'archivage par l'IGN et gravure du CDROM contenant les
logiciels destinés à l'utilisation interne de l'IGN (1 semaine).
1.1.8. Contexte économique des travaux effectués pendant le stage :
Les 2 projets confiés par l'IGN n'entrent pas dans la constitution de produits commercialisables. Il n'y
a donc pas eu d'étude de marché, ni de notion de rentabilité en jeu. Mais si ces projets ne s'inscrivent
pas dans une logique marchande, ils ont quand même une utilité économique.
Ce sont des "outils" informatiques "maison" développés pour améliorer la précision et la productivité
des relevés de l'IGN. Avant ces outils, l'IGN savait mener ces mêmes travaux, mais avec moins
d'efficacité.
Ainsi les ingénieurs-topographes pourront exploiter directement les résultats de leurs relevés sur le
terrain et les reprendre en cas d'erreur, ce qui leur évitera des aller-retour à leur bureau.
Mémoire de stage de BTS IRIS Page 9 sur 34HARGOAA Olivier Première partie : Présentation
1.2. Présentation générale des principes de la trajectographie terrestre
1.2.1. Mode opératoire :
Le principe de la méthode
consiste à parcourir le réseau Antenne GPS
routier en appliquant la méthode de
trajectographie. Pour cela, on utilise
une voiture sur laquelle sont fixés
une antenne GPS et un capteur à
ultrasons permettant de déterminer
la hauteur de l’antenne par rapport
au sol, afin d’obtenir le profil de la
route.
Capteur à
ultrasons
Visualisation de l’antenne et du capteur à ultrasons
1.2.2. Principe du positionnement par GPS :
Cette méthode est basée sur le principe du GPS différentiel. Un récepteur GPS et son antenne
sont mis en station sur un point connu (station de référence), le récepteur GPS embarqué et son
antenne fixée sur le véhicule (station mobile) enregistrent les signaux, appelés observations, envoyés
par la constellation de satellites GPS qui gravitent à ce moment là au dessus du site.
Les observations concomitantes et identiquement cadencés (1hz pour les récepteur Z12
d’Ashtech, 10 hz pour les récepteurs SR530 de Leica) sont enregistrées sur des cartes mémoires, puis
déchargées « au bureau » en fin de campagne d’enregistrement. Elles sont alors post-traitées.
Les logiciels de post-traitement (PNAV1 pour les observations issues des récepteurs Z12
d’Ashtech, SKI-PRO pour celles issues des SR530 de chez Leica) permettent de calculer à chaque
époque d’observation (toutes les secondes pour Ashtech, dix fois par seconde pour Leica) le vecteur
entre les deux stations. Les fichiers résultats issus des logiciels PNAV et SKI-PRO nous donnent dans
le référentiel de temps GPS une trajectoire du centre de phase de l’antenne ainsi qu’un certain nombre
de renseignements complémentaires.
1
Precise differential gps NAVigation and surveying.
Mémoire de stage de BTS IRIS Page 10 sur 34HARGOAA Olivier Première partie : Présentation
Schéma explicatif du principe de la trajectographie.
La bonne résolution ou précision des points solutions issus du post-traitement est dépendante
de nombreux facteurs ou sources d’erreur du système GPS. Le nombre de satellites et leur géométrie
(PDOP2) au dessus du site d’observation, ainsi que l’éloignement maximum entre la station fixe et la
station mobile apparaissent comme discriminants. Les travaux menés en 2001 par Virginie LEBLOND
fixent comme valeurs admissibles :
Nombre de satellites minimum observé par les deux stations = 6
Critère de géométrie de la constellation, PDOP < 4
Eloignement entre stations ( appelé aussi ligne de base ) < 5 km
Le respect de ces critères généraux assure a priori, une très bonne précision, de l’ordre du
centimètre, sur les solutions données par les logiciels de post-traitement. Malheureusement ces
conditions ne sont pas toujours réalisées.
1.3. Schéma des différentes étapes du traitement des signaux
Pour mieux comprendre les différences rencontrées selon le type de GPS utilisé, voici un
schéma permettant une comparaison des arborescences de fonctionnement du processus de
trajectographie dans ses phases de post-traitement.
2
PDOP : Position Dilution of Precision
Mémoire de stage de BTS IRIS Page 11 sur 34HARGOAA Olivier Troisième partie : Trajectographie 2002
Capteur + Carte
Synchronisation Synchronisation
Hauteur Capteur - Sol
Leica500
Z12
Trajecto 2002
PNAV SKIPRO
Carte.txt
Gps.txt
Synthèse.txt
Pulse.txt
Fichier C Fichier Skipro
Fichier J Synthèse2.txt
Rapport.txt
Affichage.txt
Traject_SVG
Création d’un logiciel de visualisation de SVG.svg
Mémoire de stage de BTS IRIS Page 12 sur 34HARGOAA Olivier Troisième partie : Trajectographie 2002
2. Mise à jour et amélioration du logiciel
Trajectographie 2002.
Durée du projet : 15 jours.
Utilisation de Trajecto 2002 avec le nouveau GPS Leica SR530.
Mémoire de stage de BTS IRIS Page 13 sur 34HARGOAA Olivier Troisième partie : Trajectographie 2002
2.1. Présentation de trajectographie 2002 (Extrait de J.Farah).
Le logiciel « Trajectographie_2002 »
2.1.1. Présentation et objectifs
Après le remplacement du médiator par une carte électronique et toujours dans le but d’assurer
une bonne synchronisation au système, il était nécessaire de créer un logiciel qui récupère les données
envoyées par la carte et celles envoyées par le GPS afin de les interpoler.
Paramètres du GPS
Paramètres de la carte
Pour se
Afficher la durée des déconnecter Pour sortir sans
mesures sauvegarder Quitter
du GPS
Afficher l’heure GPS Afficher la distance Etalonnage du
Pour se capteur
connecter au en Ascii
GPS
Voir le terminal Afficher la distance en Pour se déconnecter
Etat de la connexion mètre de la carte
Etat de la connexion
Choisir le type du GPS utilisé La barre d’état Voir le terminal
(Prévu mais Astech uniquement)
Pour se connecter à la carte
Pour paramétrer la carte
La feuille principale dans le logiciel « Trajectographie 2002 »
Mémoire de stage de BTS IRIS Page 14 sur 34HARGOAA Olivier Troisième partie : Trajectographie 2002
Etant donné que l’horloge du PC dérive légèrement par rapport à l’horloge du GPS, nous
avons intérêt à faire l’interpolation sur une période de temps qui sera la plus courte possible. Pour cela
nous avons fait l’interpolation des données de la carte sur une période d’une seconde GPS.
D’autre part, comme la cadence des mesures Gps est à une seconde et les mesures du capteur
sont en général supérieur à 5 Hz, il faut que le logiciel soit capable de traiter de grandes quantités de
données sans bloquer la mémoire du Pc. Pour cela, l’utilisation des fichiers intermédiaires et des listes
était nécessaire dans la programmation du logiciel.
De plus, le système est formé de plusieurs composants qui doivent fonctionner sans problème
pendant toute la période de mesure. Pour résoudre ce problème, le logiciel est doté de plusieurs
options qui présentent pendant tout le temps de mesure l’état du Gps et de la carte et par suite le
capteur.
Le logiciel a pour but de :
Configurer les ports du PC,
Assurer la connexion de la carte au Pc,
Configurer la carte (direction des pulses, fréquence de mesure, fréquence des pulses),
Etalonner le capteur,
Récupérer les données (les mesures du capteur) provenant de la carte,
Transformer les données reçues en hexadécimal au format ascii,
Récupérer l’heure PC correspondant à chacune de ces données,
Créer un fichier contenant la mesure et l’heure PC correspondante,
Assurer la connexion du GPS au Pc,
Récupérer les données (les heures) provenant du GPS,
Récupérer l’heure PC correspondant à chacune de ces données,
Créer un fichier contenant l’heure GPS et l’heure PC correspondante,
Calculer l’heure GPS correspondant à chaque mesure du capteur,
Créer un fichier de synthèse dans lequel se trouvent les mesures du capteur et les heures GPS
interpolées.
2.1.2. La conception du logiciel
Comme déjà cité précédemment, ce logiciel doit assurer la synchronisation la plus parfaite
possible entre le GPS et le capteur. Donc, la programmation de ce logiciel doit être faite sur deux pôles
indépendants mais qui seront exécutés en même temps. Pour cela, il faut minimiser le calcul pendant
la période de mesures et le faire à la fin.
Etant programmé sur l’environnement Delphi, ce logiciel est formé de cinq types de fichiers :
.dpr : le fichier projet
.res : le fichier ressource
.dof : le fichier d’option de projet
.pas : le code source de l’unité
.dfm : le fichier de gestion de l’unité Pour chaque fiche créée
trajecto2002.ini : le fichier d’initialisation.
3.1.3. La démarche appliquée
La démarche dans ce logiciel est la suivante :
1. la phase d’initialisation : on distingue :
L’initialisation des paquets : ce sont les paquets qui doivent recevoir les données de la carte et du
GPS. Dans cette étape, nous déterminons les caractères de début, de fin et la taille de la chaîne
envoyée.
L’initialisation des ports : dans cette étape, une recherche du fichier trajecto2002.ini est
déclenchée. Si le fichier est trouvé alors l’initialisation des ports (port, baud rate, data bits, stop
bits, parity, flow control) sera faite automatiquement. Sinon, ce fichier sera créé automatiquement
et l’initialisation sera faite en même temps. Il faut noter qu’après cette initialisation, toute
modification des paramètres des ports est faisable manuellement.
L’initialisation du type de GPS utilisé : le choix par défaut est pour le « Z12 d’Ashtech» mais le
choix du « Leica System 500 » est toujours possible.
Mémoire de stage de BTS IRIS Page 15 sur 34HARGOAA Olivier Troisième partie : Trajectographie 2002
L’étalonnage : (non opérationnel)
Avant de se connecter, une
phase d’étalonnage du capteur peut être
facultative car le fichier d’initialisation
trajecto2002.ini contient un étalonnage
par défaut. Mais pour le type de capteur
qu’on utilise, il est préférable de faire
un étalonnage avant chaque manip (et
pas avant chaque essai). Pour cela, le
logiciel contient une option qui permet à
l’utilisateur de faire l’étalonnage d’une
manière directe et simple.
Il suffit de prendre les valeurs
qui s’affichent dans les cases libres de
cette feuille et les placer respectivement
dans (X1,Y1) ; (X2,Y2) ;…il faut noter
ici que les X sont les distances en Ascii
et les Y sont les distances équivalentes
en mètres.
Bien que deux X avec les Y
équivalentes suffisent pour avoir un
résultat, il est conseillé que le maximum
des X et de Y soit rempli pour avoir les
valeurs les plus précises.
L’étalonnage du capteur à l’aide de « Trajectographie 2002 »
Le paramétrage de la carte :
Dans cette phase, nous déterminons la direction des pulses, la fréquence des mesures ainsi que
la fréquence des pulses. Cette phase peut être facultative et les valeurs par défaut seront :
Direction : GPS Carte
Fréquence des mesures : 5 Hz
Fréquence des pulses : F/5.
La création de deux fichiers .dat :
Ce sont les fichiers gps.dat et carte.dat. Ces deux fichiers sont réservés pour le stockage des
données déjà retenues dans les paquets. Ces deux fichiers seront effacés à la fin de l’exécution du
logiciel.
5. La connexion et le stockage des données :
Lorsque les initialisations, l’étalonnage et le paramétrage de la carte sont faits, le système est
prêt à recevoir les données envoyées par la carte et le GPS. Pour cela, il suffit d’appuyer sur les
touches « connecter » et la procédure suivante est déclenchée : les mesures du capteur et le temps Pc
correspondant sont stockés dans le fichier carte.dat et, en même temps, les mesures GPS et le temps
Pc correspondant sont stockés dans le fichier gps.dat. Dans ce contexte, il faut noter que :
Les numéros des mesures du capteur sont calculés en Ascii avant leur stockage.
Les mesures du capteur sont calculées en Ascii puis en mètres avant leur stockage.
L’ordre de connexion ou de déconnexion au GPS et à la carte est arbitraire car le logiciel contient
une procédure qui découpe les listes correspondantes aux fichiers .dat d’une manière adaptée.
Le calcul :
Lorsque les mesures sont terminées, le calcul est lancé dès qu’on appuie sur la touche
« quitter ».
Les différentes étapes dans cette phase sont les suivantes :
La création d’un premier fichier dont le nom par défaut sera carte.txt (mais qui peut être
sauvegardé autrement selon l’utilisateur) et qui contient :
Mémoire de stage de BTS IRIS Page 16 sur 34HARGOAA Olivier Troisième partie : Trajectographie 2002
L’heure Pc dans le format de Windows.
L’heure Pc en heures, minutes, secondes.
La lettre envoyée par la carte qui indique s’il y a des pulses et leurs directions.
Le numéro de la mesure.
La distance mesurée en mètre.
Un indicateur de prise de mesure qui est « T » pour indiquer que le capteur prend des mesures et
qui est « F » lorsque le capteur est bloqué c.à.d qu’il n’est pas dans l’intervalle de mesure.
La création d’un second fichier dont le nom par défaut sera gps.txt (mais qui peut être
sauvegardé autrement selon l’utilisateur) et qui contient :
L’heure GPS brute.
L’heure GPS en jours, heures, minutes, secondes.
L’heure Pc dans le format de Windows.
L’heure Pc en heures, minutes, secondes.
Création de deux listes : la première contenant les données du fichier carte .dat et la deuxième
contenant celles du fichier gps.dat.
L’enlèvement des mesures inutiles qui se trouvent dans ces deux listes comme :
Le buffer reçu à l’instant de connexion au GPS.
Les mesures du GPS qui sont prises avant la connexion à la carte en laissant une seule mesure
avant cette connexion.
Les mesures du GPS qui sont prises après la déconnexion de la carte en laissant une seule mesure
après cette déconnexion.
Les mesures de la carte qui sont prises avant (respectivement après) la connexion (respectivement
la déconnexion) du GPS.
Les mesures pendant lesquelles le capteur est bloqué.
L’interpolation des données GPS et des données cartes :
Elle consiste à :
Prendre pour chaque mesure de la carte qui se trouve dans la première liste, l’heure Pc
correspondante. Soit PcT.
Trouver ensuite dans la deuxième liste, l’heure Pc qui est directement inférieure et celle qui est
directement supérieure. Soient PcT1 et PcT2 .
Prendre les heures GPS correspondantes aux deux heures Pc déjà trouvées. Soient GT1 et GT2 .
En considérant GT comme l’heure GPS correspondante à la mesure du capteur, la formule
d’interpolation sera :
GT = GT2 - (PcT2 - PcT) * (GT2 - GT1 )/(PcT2 - PcT1 );
La création d’un troisième fichier dont le nom par défaut sera synthèse.txt (mais qui peut être
sauvegardé autrement selon l’utilisateur) et qui contient :
Les distances en dixième de millimètre
Les heures GPS correspondantes en jours, heures, minutes, secondes.
Ce fichier peut être introduit directement dans PNAV pour interpoler les distances avec les
coordonnées des points résultant du traitement des mesures GPS.
La création d’un quatrième fichier dont le nom par défaut sera pulse.txt (mais qui peut être
sauvegardé autrement selon l’utilisateur) et qui contient le même type de données que synthèse.txt
mais seulement pour les mesures prises avec pulse(envoyé ou reçu). Ce fichier sert à déterminer la
fiabilité de la synchronisation.
Mémoire de stage de BTS IRIS Page 17 sur 34HARGOAA Olivier Troisième partie : Trajectographie 2002
2.2. Passage d’une trajectoire d’antenne à une trajectoire sol
Dès le début des études, il est apparu clairement la nécessité de détenir une information
complémentaire et capitale : la hauteur d’antenne. L’idéal serait d’obtenir pour chaque point de la
trajectoire d’antenne, une valeur précise de la hauteur suivant la verticale entre le centre de phase de
l’antenne et le point associé au sol. La plate-forme (voiture ou utilitaire) à laquelle est fixée l’antenne
de la station mobile voit par le biais de ses suspensions son positionnement par rapport au sol évoluer.
L’adjonction d’un capteur à ultrasons a semble-t-il donné satisfaction lors de toutes les études menées
jusqu’à présent.
Hauteur antenne-bas de caisse = constante
Capteur de distance
Hauteur bas de caisse-sol = variable
Mesure de la hauteur d’antenne
3.2.1 Description et principe de fonctionnement du capteur à ultrasons :
Les ultrasons sont des vibrations de
même nature que le son, mais de fréquence
supérieure à la plus haute fréquence audible
pour l’homme. Il s’agit de vibrations
produites dans l’air à une fréquence
supérieure à 20000 Hz. Le fonctionnement
du capteur de distances est basé sur la
méthode de mesure dans le temps de la
propagation des ultrasons.
Les caractéristiques principales sont : Capteur à ultrasons
sa précision : +/- 2 mm
fréquence d’acquisition : de 1 à 25 Hz
Les tests de fiabilité (étude de Virginie LEBLOND) du capteur en terme de précision de la
mesure et de reproductibilité dans les conditions d’utilisations dynamiques (véhicule ayant une vitesse
maximum de l’ordre de 10 m/s) se sont avérés concluants.
Le principal obstacle à son utilisation réside dans le stockage et la mise dans un référentiel
temps commun aux observations GPS.
Mémoire de stage de BTS IRIS Page 18 sur 34HARGOAA Olivier Troisième partie : Trajectographie 2002
2.2.1. La datation dans le référentiel de temps GPS des mesures du capteur à
ultrasons :
Durant l’année 2002, une carte électronique et un
logiciel « Trajectographie 2002 », ont été conçus pour
résoudre ce problème. Il est à noter qu’il faut désormais mettre
en place un ordinateur portable dans le véhicule pour assurer la
Carte électronique
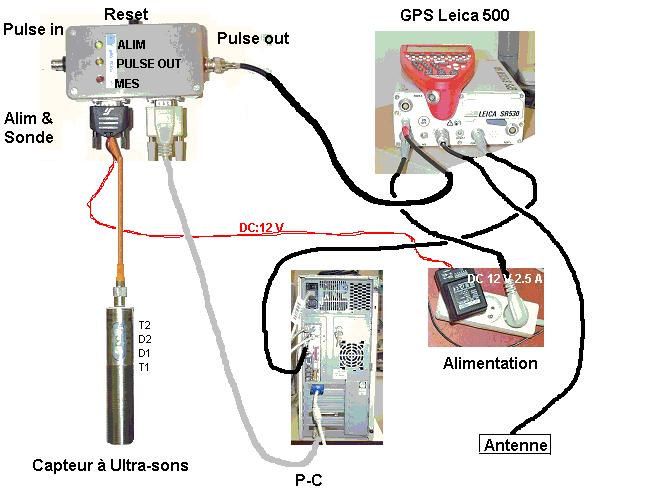
Voici décrits succinctement les rôles de chacun des composants embarqués :
La carte : elle a pour rôle principal de
récupérer les mesures du capteur à ultrasons
(tension électrique proportionnelle à la distance
mesurée) et de les envoyer à l’ordinateur portable
( codage ASCII de la tension reçue). Son second
rôle est d’envoyer, en direction du récepteur GPS,
des impulsions concomitantes aux mesures du
capteur.
Le récepteur GPS : son rôle principal est
d’enregistrer les signaux venant de la
constellation satellite toutes les secondes (pour
les récepteurs Z12). Son second rôle est d’émettre
toutes les secondes un message codée en ASCII
(date). Enfin, il date les évènements extérieurs
comme les impulsions issues de la carte
électronique.
Schéma des connexions entre tous les
composants embarqués
Le capteur à ultrasons : mesure une distance et envoie à la carte un créneau de tension
proportionnelle à la mesure. La fréquence est variable et peut-être choisie entre 5 et 25 Hz
environ.
L’ordinateur portable et le logiciel « Trajectographie 2002 » :
Ce logiciel créé en 2002, par Joseph FARAH et Jacques BEILIN, a pour fonction principale
de dater les valeurs mesurées par le capteurs à ultrasons. Un fichier de sortie « synthese.txt »
associe à chaque mesure du capteur une date dans le référentiel de temps GPS.
Mémoire de stage de BTS IRIS Page 19 sur 34HARGOAA Olivier Troisième partie : Trajectographie 2002
2.3. Evolutions pour Trajecto_2002
2.3.1. La demande de l’IGN
Avec l’achat par l’IGN de nouveaux récepteurs GPS (en avril 2003), la mise à jour du logiciel
de Joseph Farah était devenu nécessaire, c’est pourquoi l’IGN m’a donné pour mission de rendre
compatible ce logiciel existant pour un fonctionnement avec un GPS dix fois plus rapide que le
modèle précédent.
Ce logiciel est codé sous Borland Delphi 6 en Pascal Objet, langage auquel il a fallu que je me
forme avant de pouvoir être opérationnel.
Dans la reprise de ce source, il me sont très vite apparues quelques nécessités telles que la
réfection totale de la procédure d’étalonnage ainsi que l’établissement d’une formule de conversion
des distances plus performante.
2.3.2. Mise à jour et améliorations
2.3.2.1. Tests sur le capteur à ultrasons et conclusions
Pour la détermination de la correction à apporter à la procédure d’étalonnage, j’ai dû effectuer
plusieurs séries de test sur le capteur à ultrasons.
D’après la notice du constructeur, la mesure renvoyée par le capteur serait proportionnelle à la
distance mesurée.
TTest
est de
surproportionnalité d’un capteur
la proportionnalité du capteur
1200
1000
800
Valeur capteur
600
400
200
0
0,28 0,3 0,32 0,34 0,36 0,38 0,4 0,42 0,44 0,46 0,48 0,5 0,51 0,52
Dis tance e n m è tre s
Les tests effectués, montrent une non proportionnalité des mesures renvoyées par le capteur
sur une plage de mesure qui est dite idéale par le constructeur (de 27 à 60 cm). On remarque sur le
deuxième graphique, où sont relevées les mesures renvoyées par le capteur en position fixe, montrent
une précision à 2 millimètres.
Mémoire de stage de BTS IRIS Page 20 sur 34HARGOAA Olivier Troisième partie : Trajectographie 2002
Relevé des mesures du capteur à l’arrêt.
-4
10 m
4090
4085
4080
4075
4070
4065
4060
4055
4050
1 6 11 16 21 26 31 36 41 46 51 56 61 66 71 76 81 86 91 96 101 106 111 116
10-1s
Ces graphiques nous montrent qu’il est nécessaire de réactualiser la fonction d’étalonnage.
Tout d’abord, il a fallut corriger les erreurs qui empêchaient son fonctionnement en
automatique dans les versions précédentes puis repenser la formule d’interprétation qui désormais se
base sur dix équations de droite calculées d’après les points de l’étalonnage.
L’algorithme de la page
suivante représente la fonction de
conversion des distances données par
le capteur en une distance réelle en
fonction des valeurs données par
l’utilisateur lors de la procédure
d’étalonnage.
Les valeurs d’étalonnage sont
stockées dans deux tableaux vx et vy.
La valeur fournie par le
capteur est appelée h.
La valeur convertie est placée
dans le champ hauteur de la structure
bufcarte : bufcarte.hauteur
Mémoire de stage de BTS IRIS Page 21 sur 34HARGOAA Olivier Troisième partie : Trajectographie 2002
DEBUT
h > vx[10]
h < vx[1]
inf = 1
bufcarte.hauteur=0 sup = 10
i=1
boucle = false
h ≥ vx[i]
h < vx[i] inf = i
sup = i
Boucle = true
i = i+1
i ≤ 10 et boucle = false
bufcarte.hauteur:=((vy[sup]-vy[inf])/(vx[sup]-vx[inf]))*h
+(vy[inf]-((vy[sup]-vy[inf])/(vx[sup]-vx[inf]))*vx[inf]);
Fin
Algorithme de la fonction de conversion des données capteur en valeurs métriques utilisant les points
de l’étalonnage.
Mémoire de stage de BTS IRIS Page 22 sur 34HARGOAA Olivier Troisième partie : Trajectographie 2002
2.3.2.2. Prise en considération du nouveau récepteur GPS
L’acquisition des données se fait de la même manière que pour les récepteurs Z12, c’est à dire
par le biais du port série. Pour pouvoir compiler le logiciel Trajecto_2002 il faut inclure la
bibliothèque CPortLib, disponible sur internet.
La trame délivrée par le GPS est de type HPT3, dont la structure diffère de celle des GPS
précédents d’où la création d’une nouvelle dans le programme unité bâtie sur le modèle du précédent
.
Poste de conception et de
tests pour l’amélioration du
logiciel Trajecto_2002.
Plusieurs tests ont été effectués pendant et après la réfection du logiciel à diverses vitesses de
transmission et d’acquisition ce qui a permis de valider cette nouvelle version du logiciel.
A été ajoutée une nouvelle gestion du bouton quitter du logiciel, sur lequel il est désormais
impossible de cliquer par erreur pendant une phase de mesure ainsi que celui des paramètres de la
carte et celui de l’étalonnage. On remarquera aussi que la gestion de l’étalonnage a été simplifiée par
la visualisation de la distance en mètres pendant le relevé.
L’ajout d’une aide en ligne simplifiera l’utilisation du logiciel vu qu’elle propose notamment
les schémas de connections entre les divers composants pour les deux modèles de GPS. Elle propose
aussi une aide pour la configuration du capteur sur la délimitation de ses plages de mesures.
2.4. Conclusions
Cette nouvelle version du logiciel appelée 10.0.12 semble fonctionner correctement mais
malheureusement, la version qui m’a servi de version de départ ne fonctionnait pas non plus avec les
anciens récepteurs (je ne m’en suis aperçu qu’en fin de stage lorsque qu’un GPG Z12 est revenu de
l’atelier). Pour avoir un logiciel complet il faudra désormais attendre la venue d’un autre stagiaire qui
pourrait concaténer les deux versions, mais en attendant il suffit de posséder la nouvelle version et la
version 10.0.9.
3
High Precision Time.
Mémoire de stage de BTS IRIS Page 23 sur 34HARGOAA Olivier Première partie : Présentation
3. Création d’un logiciel de visualisation de
trajectoires.
Durée du projet : un mois.
Cette partie présente les études et les réalisations pour le logiciel Trj_Svg_2003. Dans un
premier temps nous verrons le cahier des charges et les études qui ont été faites pour y répondre,
ensuite nous verrons le programme proposé ainsi que ses limites fonctionnelles qu’il faudrait
éventuellement retravailler.
Mémoire de stage de BTS IRIS Page 24 sur 34HARGOAA Olivier Deuxième partie : Visualisation de trajectoires
3.1. Présentation des contraintes
3.1.1. Fonctionnalités
Souhait :
Présenter le plus synthétiquement et visuellement la qualité d’une trajectoire afin de
déterminer les parties ou segment de trajectoire qui répondent au besoin du commanditaire (en terme
de précision) et donc de connaître les zones devant être reprises par des techniques de mesures 4 autres
que celle du lever par GPS 5 en vue de la constitution d’une trajectoire complète.
Ce logiciel doit être le plus indépendant possible afin de fonctionner dans toutes les situations.
Toutefois, le logiciel Circé 2000 6 doit être utilisé.
Fonctions à assurer :
Fonctions qualitatives :
-Pour PNAV :
Qualifier chaque point de la trajectoire en fonction des critères :
-Nombre de satellites 7
-PDOP (Position Dilution Of Precision) 8
-RMS (Root Min Square) 9
-Resid
-Chi2
-Pour Skipro :
Seul le critère de résolution des ambiguïtés sera retenu en attendant le résultat des géomètres
sur l’interprétation des autres valeurs données par Skipro.
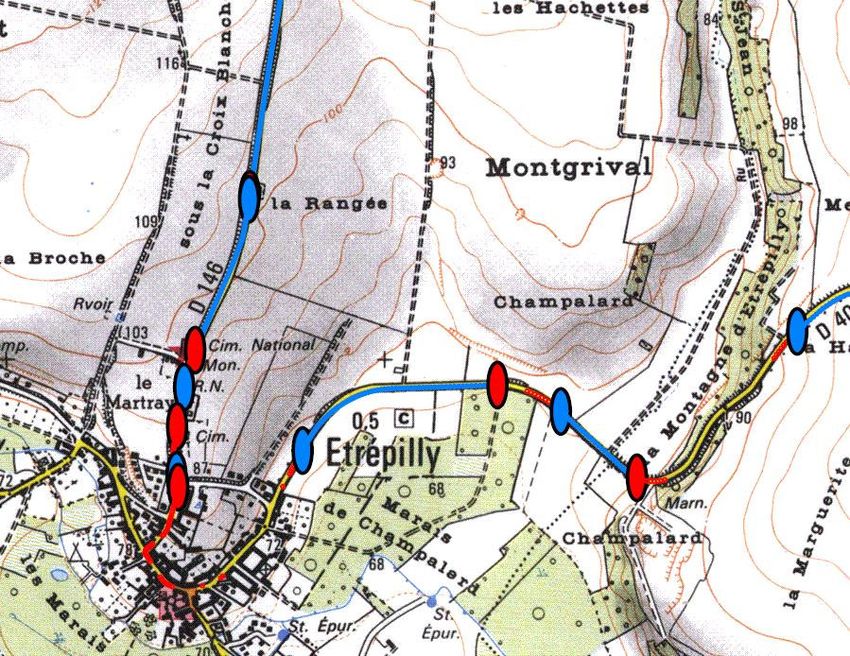
Fonctions visuelles :
Visualiser la trajectoire plane et les segments répondants à la qualité souhaitée et ceux ne
répondant pas avec l’utilisation d’une sémiologie simple (OK : bleu ; pas OK : rouge)… ceci dans un
but d’aide à la décision pour les éventuelles reprises et pour « comprendre » les problèmes survenus
(masque à la réception des signaux satellites, constellation mal ajustée…).
Le logiciel doit accepter plusieurs portions de trajectoires afin de créer une trajectoire
complète.
Produire un fichier de synthèse et un fichier de rapport.
4
Photogrammétrie, tachéométrie.
5
Global Positioning System.
6
Conversion des coordonnées géographiques et cartésiennes en coordonnées planes.
7
Doit être supérieur ou égal à 6 en trajectographie
8
Mesure de dilatation du réseau satellite
9
Critère de qualité de distance du calcul
Mémoire de stage de BTS IRIS Page 25 sur 34HARGOAA Olivier Deuxième partie : Visualisation de trajectoires
3.1.2. Performances demandées
Le logiciel doit être capable de gérer des fichiers volumineux (20 Mo ⇔ 200 000 points) car
les GPS relèvent des trajectoires jusqu'à 10 Hz. Il doit être possible en quelques minutes de visualiser
sa trajectoire sur un fond de carte en fonction des critères de qualité demandés.
3.1.3. Contraintes de réalisation
Ce logiciel a été crée et testé sous un environnement Windows 2000 Pro équipé d’un PIII
800Mhz et de 512 Mo de SDRAM. Pour une visualisation confortable de la trajectoire, il est plus que
conseillé d’avoir un système performant.
Le compilateur utilisé est Borland C++ Builder 6, et il est nécessaire de posséder Adobe SVG
Viewer disponible en freeware sur Internet.
3.2. Réalisation
3.2.1. Analyse et code
3.2.1.1. Première partie : Gestion des fichiers
On rappelle que le logiciel doit pouvoir traiter de gros fichiers, c’est pourquoi il a très vite
fallu trouver une alternative à la copie des données en mémoire RAM. Le logiciel ne demandant pas
de performances remarquables en matière de vitesse, la solution retenue est une gestion des flux de
fichier ligne à ligne ce qui permet de repousser les limites du programme à celles de la capacité du
disque dur.
Pour traiter les fichiers ASCII en mode ligne à ligne, le C++ offre des fonctions performantes
grâce à la classe de gestion de flux « fstream.h ».
Le logiciel séparé en 4 étapes a pour premier rôle d’extraire d’un ou plusieurs fichiers 10
certaines données et de les réécrire dans un autre fichier au format d’entrée pour le logiciel Circe 2000.
Il récupère ensuite les données issues de Circe 2000 et les intègre avec les données des fichiers
précédents pour créer un fichier de synthèse globale. On note aussi la création d’un fichier de synthèse
pour l’affichage et la création en ligne à ligne d’un fichier svg 11 pour la visualisation des trajectoires
3.2.1.2. Deuxième partie : Création de processus
Une autre des contraintes du logiciel était de réussir à intégrer le logiciel Circe2000 à
l’intérieur du fonctionnement général du programme.
La fonction « CreateProcess » permet de lancer le logiciel Circe 2000 tout en gardant la main
sur les autres programmes en cours d’exécution.
10
Fichiers C et J ou fichiers issus de Skipro.
11
Squalable Vectorial Graphics
Mémoire de stage de BTS IRIS Page 26 sur 34Vous pouvez aussi lire