Document D4.4 Feuille de route détaillée des sites de test - Deuxième année du projet - 5G-CroCo
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
Contrôle transfrontalier de cinquième génération
Document D4.4
Feuille de route détaillée
des sites de test
- Deuxième année du projet
Version : v1.0
07/02/2020
Ce projet a reçu un financement du programme de l'Union européenne pour la recherche et l'innovation
Horizon 2020 dans le cadre de la convention de subvention n° 825050. Les résultats de 5GCroCo reflètent
uniquement l'opinion des auteurs. La Commission n'est donc pas responsable de l'usage qui pourrait être fait des
informations qu'ils contiennent.
http://www.5g-ppp.eu
Public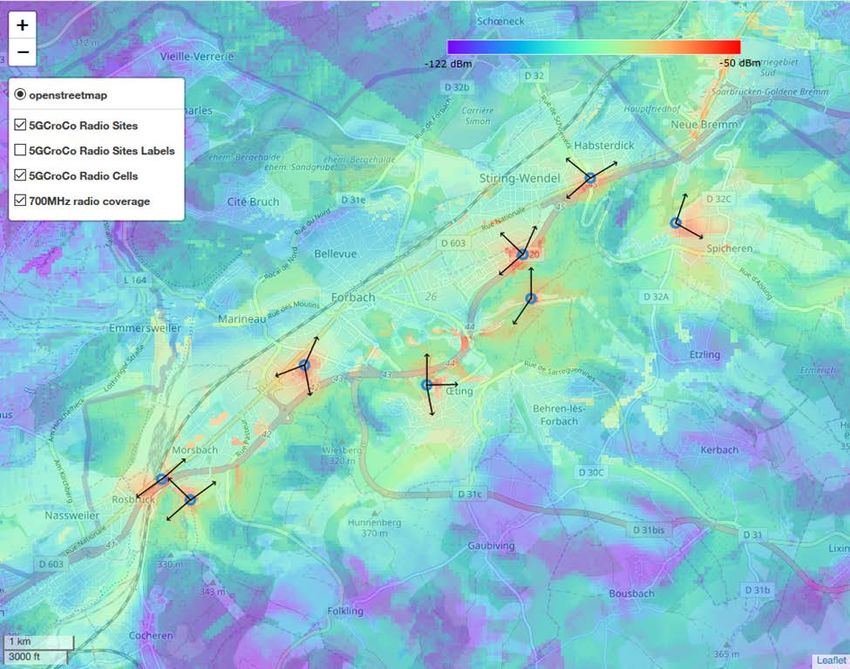
Document/Rapport D4.4
Feuille de route détaillée
des sites de test
- Deuxième année du projet
Numéro de la convention de subvention : 825050
Nom du projet : Contrôle transfrontalier de cinquième génération
Acronyme du projet : 5GCroCo
Numéro du document : 5GCroCo/ D4.4
Titre du document : Feuille de route détaillée des sites d'essai - Deuxième année du
projet
Version : v1.0
Date de livraison : 07/02/2020
Éditeur(s) : Stefan Wendt (Orange)
Auteurs : M. Muehleisen (ERI), S. Wendt (Orange), A. Schimpe (TUM), JM.
Odinot (Orange), R. Munoz (CTTC), J. Löfede (Volvo), L.
Dizambourg (PSA), M. Nilsson (Volvo), M. Gharba (HWDU), A.
Kousaridas (HWDU), E. Perraud (RSA), R-W. Henn (BOSCH), S.
Euler (ERI), S. Allio (Orange), F. Moscatelli (NXW), G. Landi
(NXW), C. Jung (POST), F. Vázquez-Gallego (CTTC), R. Vilalta
(CTTC), J.L. De la Cruz (CTTC), X. Vilajosana (WSE), M.
Catalan (I2CAT), E. Fischer (DTAG), H. Zhao (Volvo), T. Floess
(BOSCH), E. Walossek (BOSCH), I. Gonzalez Vazquez
(Volkswagen AG), J. Alonso-Zarate (CTTC).
Réviseurs externes : Cédric Seureau (Orange)
Mots-clés : 5G, CCAM, sites de test, planification, cas d'utilisation
Statut : Final
Niveau de diffusion : Public
2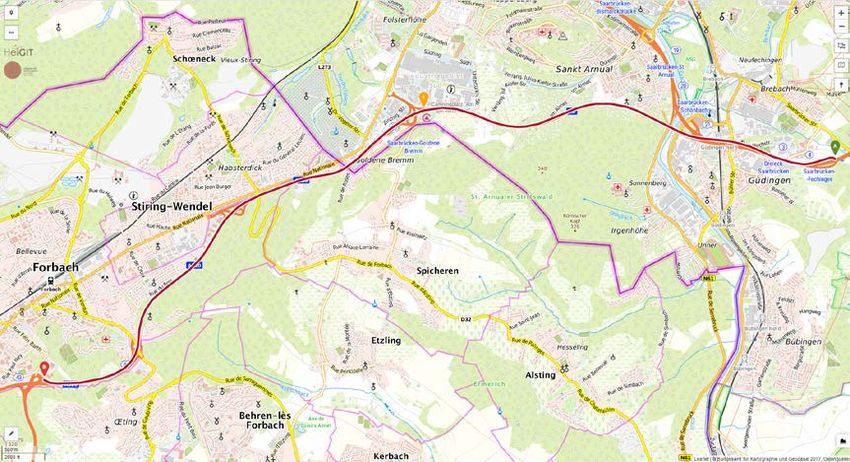
Historique des versions
Version Date de Description des changements Dernier éditeur
publication
0.1 13/12/2019 Première ébauche Stefan Wendt
1.0- 06/01/2020 Ajout de détails et contenu manquant Stefan Wendt
ÉBAUCHE
1.0- 14/01/2020 Restructuration et harmonisation Stefan Wendt
ÉBAUCHE
v1.0- 24/01/2020 Peaufinage après saisie pour restructuration Stefan Wendt
ÉBAUCHE
v1.0- 30/01/2020 Version finale pour l’équipe de gestion de Stefan Wendt
PMT1 projet (PMT) ;
peaufinage final et achèvement effectués
v1.0- 31/01/2020 Version finale pour l’équipe de gestion de Stefan Wendt
PMT2 projet (PMT) ;
intégration des commentaires du réviseur
externe
v1.0 06/02/2020 Version finale Stefan Wendt
comprenant les commentaires de la révision
de la PMT
v1.0 07/02/2020 Contrôle final avant soumission au CE Jesus Alonso-
Zarate
3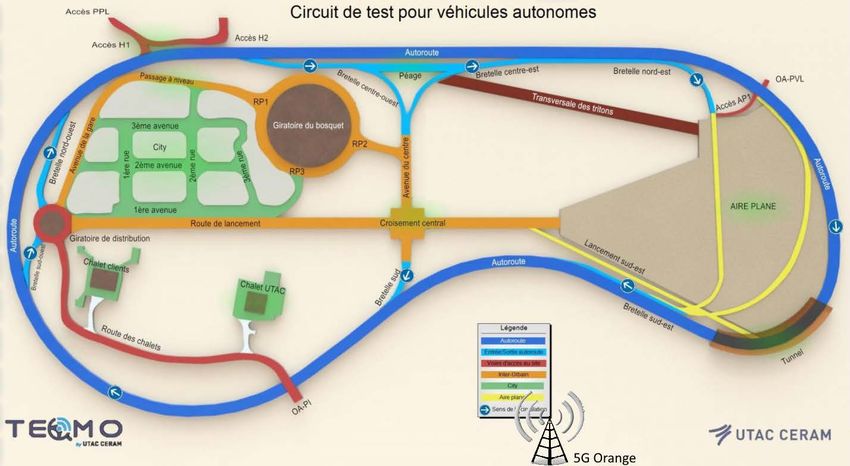
Document : 5GCroCo/ D4.4
Version : v1.0
Date : 07/02/2020
Statut : Final
Niveau de diffusion : Public
Table des matières
1 Introduction ........................................................................................................................11
1.1 Objectif du document ..................................................................................................11
1.2 Structure du document ................................................................................................11
2 Cas d'usage du projet 5GCroCo ........................................................................................13
2.1 Conduite à distance ....................................................................................................13
2.2 Cartographie haute définition ......................................................................................14
2.3 Prévention anticipée des collisions en coopération .....................................................15
2.4 Aperçu des récits utilisateurs ......................................................................................16
3 Sites de test 5GCroCo .......................................................................................................18
4 Cartographie des solutions 5G pour les sites de test .........................................................22
5 Véhicules 5GCroCo ...........................................................................................................23
6 Définition de l'architecture de réseau de 5GCroCo.............................................................24
7 Calendrier général .............................................................................................................25
8 Étapes communes pour les sites de test ............................................................................26
8.1 Étapes liées à la partie Réseau...................................................................................26
8.2 Étapes liées à la partie Cas d'utilisation ......................................................................26
8.3 Étapes liées à la partie Véhicules ...............................................................................26
9 Véhicules utilisés et calendrier ...........................................................................................27
9.1 Niveau d'automatisation ..............................................................................................27
9.2 Volvo...........................................................................................................................28
9.2.1 Caractéristiques des voitures ...............................................................................28
9.2.2 Développement à bord des véhicules ..................................................................28
9.2.3 Calendrier ............................................................................................................28
9.3 BOSCH .......................................................................................................................28
9.3.1 Caractéristiques des voitures ...............................................................................28
9.3.2 Développement à bord des véhicules ..................................................................28
9.3.3 Calendrier ............................................................................................................28
9.4 Volkswagen AG ..........................................................................................................28
9.4.1 Caractéristiques des voitures ...............................................................................28
4
Document : 5GCroCo/ D4.4
Version : v1.0
Date : 07/02/2020
Statut : Final
Niveau de diffusion : Public
9.4.2 Développement à bord des véhicules ..................................................................28
9.4.3 Calendrier ............................................................................................................28
9.5 RSA ............................................................................................................................28
9.5.1 Caractéristiques des voitures ...............................................................................28
9.5.2 Développement à bord des véhicules ..................................................................28
9.5.3 Calendrier ............................................................................................................28
9.6 PSA ............................................................................................................................29
9.6.1 Caractéristiques des voitures ...............................................................................29
9.6.2 Développement à bord des véhicules ..................................................................29
9.6.3 Calendrier ............................................................................................................29
9.7 CTTC ..........................................................................................................................29
9.7.1 Caractéristiques des voitures ...............................................................................29
9.7.2 Développement à bord des véhicules ..................................................................29
9.7.3 Calendrier ............................................................................................................29
10 Autoroute A9 5G - ConnectedMobility - Site de test à petite échelle...................................30
10.1 Description du site ......................................................................................................30
10.2 Partenaires impliqués .................................................................................................30
10.3 Solutions 5G testées pour la CCAM ............................................................................30
10.4 Contribution au corridor à grande échelle ...................................................................30
10.5 Contribution au test de la 5G pour la CCAM dans des scénarios transfrontaliers ........30
11 Barcelone : site de test à petite échelle ..............................................................................31
11.1 Description du site ......................................................................................................31
1.1.1 Description non technique....................................................................................31
1.1.2 Description technique ..........................................................................................31
11.2 Partenaires impliqués .................................................................................................31
11.3 Solutions 5G testées pour la CCAM ............................................................................31
11.4 Chronologie ................................................................................................................31
11.5 Contribution au corridor à grande échelle ...................................................................31
11.6 Contribution au test de la 5G pour la CCAM dans des scénarios transfrontaliers ........31
12 Montlhéry : site de test à petite échelle ..............................................................................32
12.1 Description du site ......................................................................................................32
5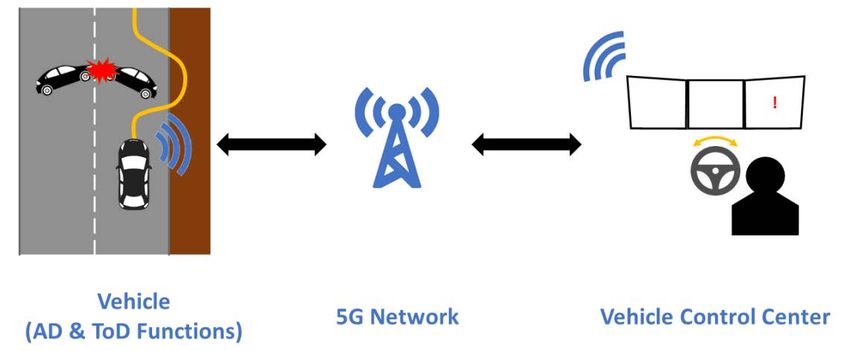
Document : 5GCroCo/ D4.4
Version : v1.0
Date : 07/02/2020
Statut : Final
Niveau de diffusion : Public
12.1.1 Description non technique....................................................................................32
12.1.2 Description technique ..........................................................................................32
12.2 Partenaires impliqués .................................................................................................33
12.3 Solutions 5G testées pour la CCAM ............................................................................33
12.4 Calendrier ...................................................................................................................34
12.5 Contribution au corridor à grande échelle ...................................................................36
12.6 Contribution au test de la 5G pour la CCAM dans des scénarios transfrontaliers ........36
13 Munich : site de test à petite échelle ..................................................................................38
13.1 Description du site ......................................................................................................38
13.1.1 Description non technique....................................................................................38
13.1.2 Description technique ..........................................................................................38
13.2 Partenaires impliqués .................................................................................................38
13.3 Solutions 5G testées pour la CCAM ............................................................................38
13.4 Calendrier ...................................................................................................................38
13.5 Contribution au corridor à grande échelle ...................................................................38
13.6 Contribution au test de la 5G pour la CCAM dans des scénarios transfrontaliers ........38
14 AstaZero : site à petite échelle ...........................................................................................39
14.1 Description du site ......................................................................................................39
14.2 Partenaires impliqués .................................................................................................39
14.3 Solutions 5G testées pour la CCAM ............................................................................39
14.4 Calendrier ...................................................................................................................39
14.5 Contribution au corridor à grande échelle ...................................................................39
14.6 Contribution au test de la 5G pour la CCAM dans des scénarios transfrontaliers ........39
15 Corridor France-Allemagne ................................................................................................40
15.1 Description du site en France .....................................................................................40
15.2 Description du site en Allemagne ................................................................................41
15.3 Partenaires impliqués .................................................................................................41
15.4 Solutions 5G testées pour la CCAM ............................................................................42
15.5 Calendrier du Réseau France .....................................................................................43
15.6 Calendrier du Réseau Allemagne ...............................................................................44
15.7 Calendrier des cas d'usage et des récits utilisateurs ...................................................45
6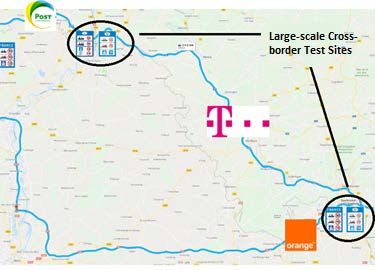
Document : 5GCroCo/ D4.4
Version : v1.0
Date : 07/02/2020
Statut : Final
Niveau de diffusion : Public
15.7.1 Cas d'utilisation 1 - Conduite à distance ..............................................................46
15.7.2 Cas d'usage 2 : Cartographie HD ........................................................................47
15.7.3 Cas d'utilisation 3 : ACCA ....................................................................................47
16 Corridor Allemagne-Luxembourg .......................................................................................49
16.1 Description du site en Allemagne ................................................................................49
16.2 Description du site au Luxembourg .............................................................................49
16.3 Partenaires impliqués .................................................................................................49
16.4 Solutions 5G testées pour la CCAM ............................................................................49
16.5 Calendrier du Réseau Allemagne ...............................................................................49
16.6 Calendrier du Réseau Luxembourg ............................................................................49
16.7 Calendrier des cas d'usage et des récits utilisateurs ...................................................49
16.7.1 Cas d'usage 1 : Conduite à distance ....................................................................49
16.7.2 Cas d'usage 2 : Cartographie HD ........................................................................49
16.7.3 Cas d'usage 3 : ACCA .........................................................................................49
17 Évaluation des risques .......................................................................................................50
17.1 Risques liés aux cas d'usage ......................................................................................50
17.1.1 Cas d'usage 1 : Conduite à distance ....................................................................50
17.1.2 Cas d'usage 2 : Cartographie HD ........................................................................50
17.1.3 Cas d'usage 3 : ACCA .........................................................................................51
17.2 Risques liés aux véhicules ..........................................................................................52
17.2.1 Volvo ...................................................................................................................52
17.2.2 BOSCH ................................................................................................................52
17.2.3 Volkswagen AG ...................................................................................................53
17.2.4 RSA .....................................................................................................................53
17.2.5 PSA .....................................................................................................................54
17.2.6 CTTC ...................................................................................................................54
17.3 Risques liés aux sites de test ......................................................................................55
17.3.1 Autoroute A9 5G-ConnectedMobility ....................................................................55
17.3.2 Barcelone ............................................................................................................55
17.3.3 Montlhéry .............................................................................................................55
17.3.4 Munich .................................................................................................................55
7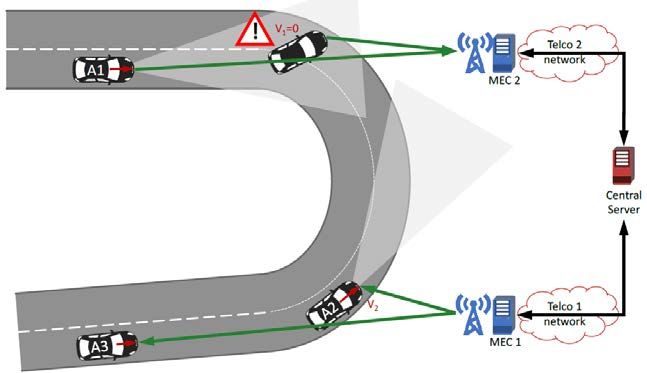
Document : 5GCroCo/ D4.4
Version : v1.0
Date : 07/02/2020
Statut : Final
Niveau de diffusion : Public
17.3.5 AstaZero ..............................................................................................................55
17.3.6 Corridor France-Allemagne ..................................................................................55
17.3.7 Corridor Allemagne-Luxembourg .........................................................................56
18 Conclusions .......................................................................................................................57
8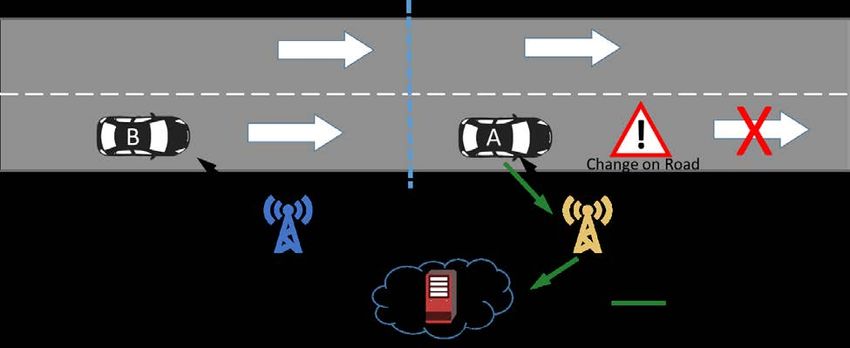
Document : 5GCroCo/ D4.4
Version : v1.0
Date : 07/02/2020
Statut : Final
Niveau de diffusion : Public
Liste des abréviations et des acronymes
3GPP Projet de partenariat de ECU Unité de contrôle électrique
troisième génération
AESRI Agence européenne chargée
ACCA Prévention anticipée des
(ENISA) de la sécurité des réseaux et
collisions en coopération
de l'information
ACEA Association des constructeurs
ETSI Institut européen des normes
européens d’automobiles
de télécommunications
AD Conduite automatisée
FQDN Nom de domaine pleinement
ADV Véhicule à conduite qualifié
automatisée GBR Débit binaire garanti
ADAS Système avancé d'aide à la
RGPD Règlement général sur la
conduite
(GDPR) protection des données
IA Intelligence artificielle
GNSS Système mondial de
AMQP Protocole avancé de mise en radionavigation par satellite
file d'attente des messages GPU Unités de traitement
API Interface de programmation graphique
d'applications GSM Système mondial de
AS Serveur d'applications communications mobiles
HD Haute définition
AV Audio / Vidéo
IHM Interface homme-machine
BTP Protocole de transport de
(HMI)
base
HSM Module de sécurité matérielle
CAM Message de sensibilisation
coopérative HTTP Protocole de transfert
CAN Réseau de contrôleurs hypertexte
ID Identifiant
CAT Catégorie
IP Protocole Internet
CCAM Mobilité coopérative,
connectée et automatisée ISO Organisation internationale de
CCU Unité de contrôle des normalisation
communications IT Technologie de l'information
CPM Message de perception
ITS Système de transport
coopérative
intelligent
CSMS Système de gestion de la
JSON Notation d'objet JavaScript
cybersécurité
DENM Message de notification JWT Jeton Web JSON
environnementale
ICP Indicateur clé de performance
décentralisée
(KPI)
DNS Service des noms de domaine
LDM Carte dynamique locale
DSRC Communications dédiées à
LTE Évolution à long terme
courte portée
9
Document : 5GCroCo/ D4.4
Version : v1.0
Date : 07/02/2020
Statut : Final
Niveau de diffusion : Public
MAC Contrôle d'accès aux medias OS Système d'exploitation
MEC Mobile Edge Computing/Cloud OTT Service par contournement
MIMO Entrées multiples, sorties PC Ordinateur personnel
multiples
PDN Réseau de données par
MNO Opérateur de réseau mobile
paquets
MQTT Transport de télémétrie par PF Fonction de prédiction
file d'attente de messages
P-GW Passerelle PDN
MSC Diagramme de séquence de
messages pQoS Qualité de service prédictive
NAT Traduction d'adresse réseau
QCI Indicateur de classe de qualité
NIST Institut national des normes et
QoS Qualité de service
de la technologie
OEM Fabricant d'équipement ROI Zone d'intérêt
d'origine
ToD Conduite à distance
OBD Diagnostic embarqué
V2X Véhicule-à-Tout
OBU Unité embarquée
10Document : 5GCroCo/ D4.4
Version : v1.0
Date : 07/02/2020
Statut : Final
Niveau de diffusion : Public
1 Introduction
1.1 Objectif du document
5GCroCo prévoit de déployer des tests 5G à grande échelle sur les routes transfrontalières aux
frontières franco-allemande et germano-luxembourgeoise au cours des étés 2020 et 2021. Les
différents cas d'utilisation de 5GCroCo (décrits dans le document public D2.1 disponible sur le
site web du projet) seront déployés dans le cadre de ce corridor à grande échelle. En outre, des
déploiements de sites de test à petite échelle en France, en Espagne, en Allemagne et en Suède
sont également prévus pour l'été 2020, comme première étape vers nos essais à grande échelle
en 2020 et 2021.
Ce document public fournit un plan détaillé pour la deuxième année d'exécution du projet qui
concerne la première série de tests à grande et petite échelle prévue pour l'été 2020. Un plan
détaillé, une feuille de route et la coordination des tests des solutions 5G pour la mobilité
coopérative, connectée et automatisée (CCAM) par site de test et par cas d'utilisation sont fournis.
Ce document expose la façon dont les sites de test à petite échelle contribuent aux sites de test
à grande échelle et aux tests de la 5G pour la CCAM dans le cadre de scénarios transfrontaliers.
Il présente également les solutions 5G pour la CCAM testées par cas d'usage et par site de test.
1.2 Structure du document
Le document commence par un bref résumé des informations clés importantes sur le projet
5GCroCo, à savoir un résumé des cas d'usage de 5GCroCo dans la section 2 et une brève
introduction aux sites de test dans la section 3. La section 4 résume les solutions 5G qui seront
envisagées sur chaque site de test. La section 5 décrit les véhicules qui seront utilisés pour les
tests 5GCroCo, et la section 6 présente la définition de l'architecture du réseau.
Le calendrier général pour cette deuxième année de projet est fourni dans la section 7. Présentée
dans la section 8, une série d'étapes communes a été définie afin d'obtenir une approche
cohérente à travers nos différents sites de test.
Les détails concernant les véhicules utilisés pour le déploiement des cas d'utilisation et le
calendrier de développement des voitures ainsi que la date de disponibilité sont fournis dans la
section 9.
Un des principaux blocs de contenu de ce document consiste en un calendrier détaillé pour
chacun des sites de test. Ce calendrier est présenté de manière détaillée dans les sections 10 à
16. En outre, pour chaque site, nous expliquons les solutions 5G testées pour la CCAM qui sont
utilisées et comment cela se rapporte à l'objectif final qui est de mener des tests à grande échelle
sur les routes transfrontalières.
11Document : 5GCroCo/ D4.4
Version : v1.0
Date : 07/02/2020
Statut : Final
Niveau de diffusion : Public
Les tests de 5GCroCo se concentrent sur trois cas d'utilisation différents comprenant des
exigences différentes et, par conséquent, des risques associés différents. En outre, le projet
5GCroCo comporte divers sites de test, qu'il s'agisse de pistes fermées ou de routes ouvertes.
Chaque site a des exigences très différentes et des risques qui y sont associés. Pour ces raisons,
la section 17 est dédiée à l'analyse des risques associés concernant les cas d'utilisation, les sites
de test et les véhicules.
La section 18 conclut le document.
12Document : 5GCroCo/ D4.4
Version : v1.0
Date : 07/02/2020
Statut : Final
Niveau de diffusion : Public
2 Cas d'usage du projet 5GCroCo
Cette section contient une brève description des trois cas d'usage du projet 5GCroCo. La section
s'achève par un tableau récapitulatif comprenant également de courtes descriptions des « récits
utilisateurs » (user stories = variantes des cas d’usage). Plus de détails sont fournis dans le
document 2.1 [1].
2.1 Conduite à distance
Les prototypes actuels de véhicules à conduite automatisée prouvent la faisabilité de véritables
voitures sans conducteur. La conduite à distance peut être utilisée comme une technologie
permettant de faciliter cette transition, puisqu’il reste des cas particuliers qui nécessitent de
recourir à des opérateurs humains. L'architecture globale de la conduite à distance, qui est
envisagée, est présentée sur la Figure 2-1. Une interface consacrée à la conduite à distance est
créée sur le réseau mobile 5G et permet à un humain de contrôler un véhicule à distance. Grâce
à cette interface, les données des capteurs et du véhicule, par exemple les flux vidéo et la vitesse,
sont transmises du véhicule au centre de contrôle du véhicule. Lors de cette étape, les données
sont affichées pour le téléopérateur humain qui génère des commandes de contrôle, telles que
l'angle du volant ou la vitesse désirée. Elles sont ensuite transmises au véhicule pour exécution.
La technologie de la conduite à distance est confrontée à un certain nombre de défis qui doivent
être relevés.
Figure 2-1 : Vue d'ensemble schématique du cas d'usage de la conduite à distance
La connaissance limitée de la situation constitue l'un des plus grands défis de la conduite à
distance, car le téléopérateur ne se trouve pas physiquement dans le véhicule. Un effort mental
supplémentaire est nécessaire pour compenser les distorsions et recréer les informations
manquantes à partir des données du capteur.
La transmission de signaux sur les réseaux mobiles introduit une latence, qui peut être critique si
le véhicule est commandé à distance au niveau de stabilisation, à savoir si le téléopérateur produit
des commandes de direction directes. Si la latence est trop importante, différents concepts de
13Document : 5GCroCo/ D4.4
Version : v1.0
Date : 07/02/2020
Statut : Final
Niveau de diffusion : Public
contrôle peuvent être appliqués, tels qu'un schéma de contrôle indirect, basé sur la trajectoire.
Néanmoins, grâce à la technologie 5G, les limites causées aujourd’hui par la latence des réseaux
sont susceptibles de changer.
2.2 Cartographie haute définition
L'une des pierres angulaires de la conduite autonome est une carte haute définition précise, réelle
et continue. La fonctionnalité de base consiste à déterminer la position du véhicule (quelle route
et quelle voie il emprunte) mais aussi des informations sur les règles de circulation comme les
limitations de vitesse, ou des conditions plus dynamiques comme les fermetures de routes ou les
zones de construction. Les utilisateurs de cartes haute définition (HD) s'attendent à une
disponibilité continue du contenu de la carte, même dans des scénarios transfrontaliers.
Cependant, les voitures autonomes exigent que la carte soit constamment mise à jour. Ainsi,
lorsque la réalité change, la carte doit être actualisée. La mise à jour régulière des cartes par le
fournisseur de cartes, généralement effectuée quelques fois par an en conduisant des
camionnettes de cartographie sur les routes, n’est pas du tout suffisante. Pour garantir une
grande fiabilité des voitures autonomes, la carte doit être mise à jour en permanence, par le plus
grand nombre possible de voitures participantes. De manière générale, les voitures collectent des
informations sur leur environnement à l'aide de leurs capteurs embarqués, puis se servent de leur
connectivité pour envoyer ces informations à un backend quelconque. À ce stade, les données
reçues sont comparées à la carte existante : si des différences sont constatées, la carte peut être
mise à jour. Les données peuvent même provenir d'autres sources que les voitures, par exemple
des caméras en bord de route. La carte HD peut également être utilisée en tant que base sur
laquelle des informations plus dynamiques peuvent être stockées, comme les accidents. Toutes
ces procédures doivent fonctionner de manière transparente par-delà les frontières. Par exemple,
les mises à jour de cartes provenant de voitures situées d'un côté d'une frontière doivent
également être distribuées aux voitures situées de l'autre côté, desservies par un opérateur
différent dont le backend fonctionne sur une architecture MEC (Mobile Edge Cloud/Computing)
différente.
Une vue d’ensemble schématique d'un récit utilisateur du cas d'usage de cartographie HD est
présentée sur la Figure 2-2 : Un premier véhicule, A, détecte un changement sur la route, par
exemple une voie fermée en raison de travaux de construction. Il envoie cette déviation à un
backend dans le cloud par l'intermédiaire de l'opérateur de réseau mobile 2 (MNO 2), où les
nouvelles informations sont incorporées dans la carte. La carte mise à jour est ensuite renvoyée
à tous les véhicules connectés dans les environs.
14Document : 5GCroCo/ D4.4
Version : v1.0
Date : 07/02/2020
Statut : Final
Niveau de diffusion : Public
Figure 2-2 : Vue d’ensemble schématique du cas d'usage de cartographie HD
2.3 Prévention anticipée des collisions en
coopération
En vue de la production de véhicules autonomes, les constructeurs automobiles adoptent et
développent des capteurs qui permettent aux véhicules de détecter leur environnement et de
contrôler les véhicules. Les systèmes d'automatisation de la conduite s'appuient sur une variété
de capteurs comme les caméras, les radars, les lidars, etc. Malgré le nombre croissant de
capteurs embarqués, la perception de l'environnement du véhicule reste limitée. Dans certaines
situations, les systèmes de détection autonomes classiques ne seront pas capables de détecter
et de localiser les événements dangereux sur la route à un niveau d'anticipation suffisant. Dans
de telles situations, la détection trop tardive d'un événement dangereux déclenchera un freinage
brutal, une manœuvre dangereuse ou conduira potentiellement à une collision.
Le cas d'usage de la prévention anticipée des collisions en coopération (ACCA) concerne la
possibilité d'anticiper certains événements potentiellement critiques afin de réduire la probabilité
de collisions dans des situations où les capteurs classiques n'ont aucune visibilité ou une courte
portée de détection (par exemple, quelques centaines de mètres). L'objectif du cas d'usage
d’ACCA est de provoquer des réactions plus douces et plus homogènes des véhicules en
facilitant la détection et la localisation anticipées d'événements temporairement statiques tels que
les embouteillages, les décélérations importantes, les freinages d'urgence ou les manœuvres
inattendues des véhicules précédents, etc. Un exemple de scénario typique du cas d'usage
d'ACCA est décrit sur la Figure 2-3.
15Document : 5GCroCo/ D4.4
Version : v1.0
Date : 07/02/2020
Statut : Final
Niveau de diffusion : Public
Figure 2-3 : Scénario typique du cas d'usage d'ACCA : une situation anormale ne peut
pas être détectée par les capteurs embarqués et les opérateurs de réseau mobile (MNO)
de deux pays différents sont utilisés pour la communication
2.4 Aperçu des récits utilisateurs
La mise en œuvre particulière et spécifique de chacun des cas d'usage pour les tests est appelée
« récit utilisateur » dans 5GCroCo. Le tableau 2.1 fournit une liste et une brève description des
différents récits utilisateurs qui seront mis en œuvre dans les tests et expérimentations de
5GCroCo.
Tableau 2.1 : Aperçu des récits utilisateurs de 5GCroCo
Cas
Nom abrégé Description
d'usage
RU#1 - Récit utilisateur 1 Le véhicule suit les commandes (direction,
- Contrôle direct, faible freinage, accélération) qu'il reçoit du conducteur à
vitesse distance, vitesse maximale de 15 km/h.
RU#2 - Récit utilisateur 2 Le conducteur à distance fournit une trajectoire au
- Contrôle indirect, faible véhicule, vitesse maximale de 15 km/h.
Conduite à vitesse
distance RU#3 - Récit utilisateur 3 Identique au Récit utilisateur 2 mais avec une
- Contrôle indirect, grande vitesse maximale de 80 km/h.
vitesse
RU#4 - Récit utilisateur 4 Identique au Récit utilisateur 1, mais les données
- Liaison montante étroite, des capteurs envoyées au conducteur à distance
contrôle direct, faible nécessitent un débit nettement inférieur à celui
vitesse des vidéos diffusées en continu.
Cartographie RU#1 - Récit utilisateur 1 Télécharger les données cartographiques HD
HD - Liaison descendante pour une tuile cartographique avant d'entrer dans
cette tuile. Il n'y a pas de limitation de vitesse pour
16Document : 5GCroCo/ D4.4
Version : v1.0
Date : 07/02/2020
Statut : Final
Niveau de diffusion : Public
les cas d'usage de cartographie HD, tant que
l'obstacle prévu est autorisé à être placé sur la
route.
RU#2 - Récit utilisateur 2 Envoyer les modifications de la carte détectées
- Liaison montante par les capteurs embarqués vers le fournisseur de
contenu cartographique HD. Il n'y a pas de
limitation de vitesse pour les cas d'usage de
cartographie HD, tant que l'obstacle prévu est
autorisé à être placé sur la route.
RU#3 - Récit utilisateur 3 Un véhicule exécute le récit d'utilisateur 2 et un
- Liaison autre exécute le Récit utilisateur 1 pour
montante/descendante télécharger les données cartographiques HD
fraîchement mises à jour. Il n'y a pas de limitation
de vitesse pour les cas d'usage de cartographie
HD, tant que l'obstacle prévu est autorisé à être
placé sur la route.
RU#4 - Récit utilisateur 4 Identique au Récit utilisateur 1 mais le meilleur
- Liaison descendante endroit/moment pour effectuer le téléchargement
avec qualité de service est prévu. Il n'y a pas de limitation de vitesse pour
prédictive (QdSp) les cas d'usage de cartographie HD, tant que
l'obstacle prévu est autorisé à être placé sur la
route.
RU#1 - Récit utilisateur 1 Un véhicule à l'arrêt impose un danger, le détecte
- Détection par un lui-même et envoie cette information au backend
véhicule à l'arrêt afin que les autres puissent être avertis. Si le
danger se trouve sur la même voie, le test sera
exécuté à faible vitesse pour des raisons de
sécurité.
RU#2 - Récit utilisateur 2 Identique au Récit utilisateur 1, mais soit le danger
- Détection externe d'un est détecté par d'autres véhicules qui passent, soit
véhicule à l'arrêt un algorithme de détection en arrière-plan le
détecte en analysant les informations provenant
ACCA
du véhicule à l'arrêt qui présente un danger. Si le
danger se trouve sur la même voie, le test sera
exécuté à faible vitesse pour des raisons de
sécurité.
RU#3 - Récit utilisateur 3 Identique au Récit utilisateur 2, mais le danger
- Détection externe des n'est pas imposé par un seul véhicule à l'arrêt mais
embouteillages par un embouteillage créé par de nombreux
véhicules. Si le danger se trouve sur la même voie,
le test sera exécuté à faible vitesse pour des
raisons de sécurité.
17Document : 5GCroCo/ D4.4
Version : v1.0
Date : 07/02/2020
Statut : Final
Niveau de diffusion : Public
3 Sites de test 5GCroCo
Le projet 5GCroCo fait la distinction entre les sites de test « à petite échelle » et les sites de test
« à grande échelle ». Les sites de test à petite échelle visent à tester des parties spécifiques de
cas d'usage et d'architecture et doivent être considérés comme une première étape avant de tout
installer sur le site de test à grande échelle qui présente l'objectif principal du projet. Le site à
grande échelle s'étend sur des routes transfrontalières sur lesquelles tous les cas d'usage seront
testés. Une description détaillée des sites de test peut être consultée dans [2] et dans les sections
10 à 16 du présent document. Tous les sites de test 5GCroCo nécessitent une installation en
termes de réseau et de backend (c'est-à-dire la partie spécifique au cas d'usage).
Les cinq sites de test à petite échelle sont :
Barcelone (Espagne)
Montlhéry (France)
UTAC CERAM [3] est un groupe privé et indépendant qui fournit des services dans tous les
domaines du transport terrestre. Son travail concerne la réglementation et l'approbation, les tests,
l'expertise technique dans le domaine de l'environnement, de la sécurité, de la durabilité et de la
fiabilité, la certification, les événements et la formation des conducteurs. En 2018,
l'UTAC CERAM a présenté son nouveau projet « TEQMO », le nouveau centre technologique
pour la mobilité automatisée et connectée [4]. Un centre d'innovation dédié au développement et
aux tests d'homologation des véhicules connectés et automatisés. Le nouveau terrain d'essai est
situé à l'intérieur de l'autodrome de Linas-Montlhéry et se compose de 12 km de pistes d'essai
fermées et d'installations connexes. La piste TEQMO est composée de trois environnements de
mobilité pour permettre la réalisation de différents cas d'utilisation de véhicules : route de ville,
route de campagne et route d'autoroute.
Figure 3-1 : Site de test de Montlhéry
18Document : 5GCroCo/ D4.4
Version : v1.0
Date : 07/02/2020
Statut : Final
Niveau de diffusion : Public
Munich (Allemagne)
Autoroute A9 5G-ConnectedMobility (Allemagne)
Au-delà de la réalisation de tests sur ces cinq sites de test à petite échelle, 5GCroCo a pour
objectif principal d’exécuter tous les cas d'usage sur les routes transfrontalières à grande échelle.
Les tests à grande échelle prévus dans le cadre du projet font partie du corridor transfrontalier
européen qui traverse les villes de Metz-Merzig-Luxembourg et franchit la frontière entre la
France, l'Allemagne et le Luxembourg. Elle se compose de deux emplacements : la frontière
germano-luxembourgeoise et la frontière franco-allemande.
Figure 3-2 : Emplacement des routes de test dans les sites de test à grande échelle du
corridor transfrontalier Metz-Merzig-Luxembourg
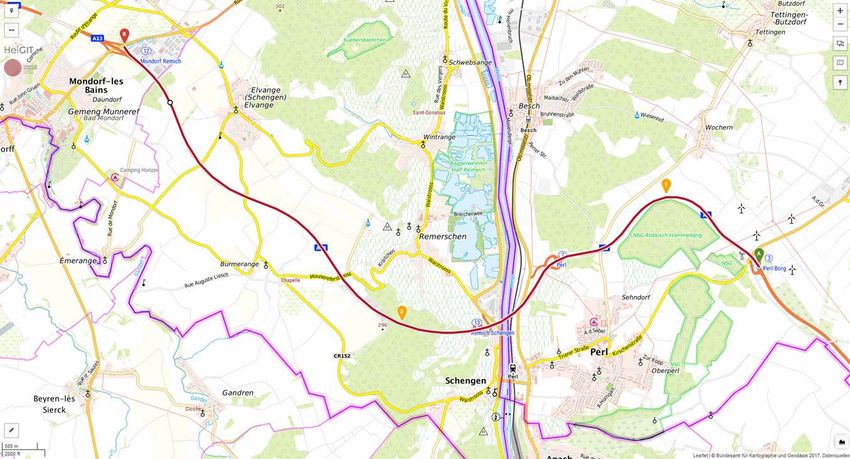
Frontière Allemagne-Luxembourg
La première zone de test à grande échelle concerne un ensemble de routes transfrontalières
entre l'Allemagne et le Luxembourg. Il est situé entre les villes de Schengen et de Merzig. En
fonction de la complexité du cas d'usage et des restrictions routières, les tests peuvent être
effectués soit sur l'autoroute, soit sur une route de campagne parallèle à l'autoroute.
19Document : 5GCroCo/ D4.4
Version : v1.0
Date : 07/02/2020
Statut : Final
Niveau de diffusion : Public
Figure 3-3 : Emplacement du corridor transfrontalier à la frontière entre le Luxembourg et
l'Allemagne (Schengen/Merzig)
Frontière France-Allemagne
La seconde zone d'essai à grande échelle concerne un ensemble de routes transfrontalières
entre la France et l'Allemagne. Il est situé à la frontière, près de la ville de Sarrebruck. En fonction
de la complexité du cas d'usage et des restrictions routières, les tests peuvent être effectués soit
sur l'autoroute, soit sur une route de campagne en parallèle.
20Document : 5GCroCo/ D4.4
Version : v1.0
Date : 07/02/2020
Statut : Final
Niveau de diffusion : Public
Figure 3-4 : Emplacement du corridor transfrontalier à la frontière franco-allemande
(Sarrebruck)
Cartographie entre les cas d'usage, les récits utilisateurs et les sites de test
Les différents cas d'utilisation et les récits utilisateurs ont été présentés dans la section 2. Le
tableau 3.1 résume la cartographie reliant les cas d'usage et les récits utilisateurs aux sites de
test.
Tableau 3.1 : Cartographie entre les cas d'usage, les récits utilisateurs et les sites de test
Conduite à distance Cartographie HD ACCA
Site de test
RU#1 RU#2 RU#3 RU#4 RU#1 RU#2 RU#3 RU#4 RU#1 RU#2 RU#3
Barcelone X X
Montlhéry X X X
Munich X X
Autoroute A9 X X X
AstaZero X X X X
Corridor F-D X X X X X X X X X X
Corridor D-L X X X X X X X X X
Tous les cas d'usage ne seront pas testés sur les mêmes sites de test. De plus, certains cas
d'usage et récits utilisateurs sont exécutés sur plusieurs sites. L'objectif est de tester les
différentes solutions 5G sur au moins un site à petite échelle et dans des environnements
différents, afin d'acquérir de l'expérience pour les grands corridors. Pour plus de détails, consulter
les sections 10 à 16.
21Document : 5GCroCo/ D4.4
Version : v1.0
Date : 07/02/2020
Statut : Final
Niveau de diffusion : Public
4 Cartographie des solutions 5G
pour les sites de test
Cette section résume les solutions 5G qui seront utilisées sur les différents sites de test. Le
Tableau 4.1 présente la cartographie des solutions 5G pour les sites de test. Un « X » indique la
disponibilité pour la première série de tests en été 2020, tandis qu’un « (X) » signifie que cela est
prévu pour la deuxième série en été 2021. Une cellule vide n'exclut pas que cela n’ait pas lieu en
2021 mais la décision n’est pas prise à l’heure actuelle.
Tableau 4.1 : Cartographie des solutions 5G pour les sites de test
Autoroute
Barcelone
Montlhéry
AstaZero
Munich
F-D
D-L
A9
Solution 5G
Non-standalone 5G New Radio (Nouvelle radio
(X) X X X X
5G non autonome)
Transfert transfrontalier/ORM X X X X
MANO et SDN - Pays unique/MNO 1 X X X X X X
1
MANO et SDN - Transfrontalier/-MNO X
Qualité de service intégrale avec supports
X X X X
dédiés1
Prévision de la qualité de service X X (X)
MEC - Calcul et hébergement à proximité du
X X X X X X
véhicule ou sur l'Internet public
MEC - Communication transfrontalière/MNO
X X X X X
inter-MEC
MEC - Présélection de la passerelle (X) (X) (X) (X)
Positionnement exact (X) X
1 Couvre également le découpage de réseau
22Document : 5GCroCo/ D4.4
Version : v1.0
Date : 07/02/2020
Statut : Final
Niveau de diffusion : Public
5 Véhicules 5GCroCo
Pour ses tests à petite et à grande échelle, 5GCroCo utilise un total de 10 véhicules différents
fournis par les six partenaires suivants :
• Volvo fournira trois véhicules pour le projet ; ils seront utilisés pour le cas d'usage
Cartographie HD pour les sites à grande échelle et pour le site à petite échelle AstaZero.
• BOSCH fournira un véhicule pour le cas d'usage de conduite à distance pour les sites à
grande échelle et pour le site à petite échelle à Munich.
• Volkswagen AG fournira un véhicule pour le cas d'usage de conduite à distance pour les
sites à grande échelle et pour le site à petite échelle de Munich.
• RSA fournira un véhicule pour le cas d'usage d'ACCA pour les sites à grande échelle et
pour le site à petite échelle de Montlhéry.
• PSA fournira deux véhicules pour le cas d'usage d'ACCA pour les sites à grande échelle
et pour le site à petite échelle de Montlhéry.
• Enfin, CTTC fournira deux véhicules : un avec PSA et un véhicule émulé. Les deux sont
destinés au cas d’usage d’ACCA sur le site à petite échelle de Barcelone.
Une description détaillée des véhicules peut être consultée dans la section 9.
23Document : 5GCroCo/ D4.4
Version : v1.0
Date : 07/02/2020
Statut : Final
Niveau de diffusion : Public
6 Définition de l'architecture de
réseau de 5GCroCo
24Document : 5GCroCo/ D4.4
Version : v1.0
Date : 07/02/2020
Statut : Final
Niveau de diffusion : Public
7 Calendrier général
Ce document porte sur la deuxième année d'exécution du projet, de novembre 2019 à octobre
2020, et concerne la première série de tests de l'été 2020.
La planification globale est orientée selon le calendrier suivant :
• Le quatrième trimestre 2019 était consacré à la mise en place de la planification et de la
préparation.
• Le premier trimestre 2020 est axé sur la mise en place du site (réseau).
• Le deuxième trimestre 2020 a pour objectif de mettre en place le(s) cas d'usage (backend)
correspondant(s) et d'effectuer des tests de fonctionnalité pour valider la mise en place.
• Le troisième trimestre 2020 est consacré aux tests de cas d'usage, y compris les mesures
des ICP.
Pendant ce temps, la planification est accompagnée par différents groupes de travail :
• groupe de travail sur les autorisations : s'occupe de toutes les autorisations dont nous
avons besoin sur les différents sites pour effectuer les tests,
• groupe de travail sur la collecte des mesures et des résultats : définit l’outil avec
lequel nous pouvons mesurer les différents ICP et comment nous pouvons sélectionner
et traiter les résultats des mesures. Puisque chaque site présente les mêmes cas d'usage,
nous aurons les mêmes exigences pour les mesures des ICP,
• groupe de travail sur les modems : s'occupe de la sélection des modems 4G et 5G
appropriés supportant les bandes de fréquence utilisées dans les différents réseaux de
test.
25Document : 5GCroCo/ D4.4
Version : v1.0
Date : 07/02/2020
Statut : Final
Niveau de diffusion : Public
8 Étapes communes pour les sites
de test
8.1 Étapes liées à la partie Réseau
8.2 Étapes liées à la partie Cas d'utilisation
8.3 Étapes liées à la partie Véhicules
26Document : 5GCroCo/ D4.4
Version : v1.0
Date : 07/02/2020
Statut : Final
Niveau de diffusion : Public
9 Véhicules utilisés et calendrier
Cette section donne un aperçu de tous les véhicules qui seront utilisés pour les différents tests.
9.1 Niveau d'automatisation
La société des ingénieurs automobiles (SAE) [5] définit 6 niveaux d'automatisation de la conduite
allant de 0 (entièrement manuelle) à 5 (entièrement autonome) :
• Niveau zéro (0) : pas d'automatisation.
• Niveau un (1) : le conducteur est assisté (par exemple, direction assistée ou aide au
freinage ou à l'accélération).
• Niveau deux (2) : automatisation partielle (par exemple, direction assistée et aide au
freinage ou à l'accélération).
• Niveau trois (3) : automatisation conditionnelle (par exemple, conduite du véhicule dans
des conditions limitées ; chauffeur dans les embouteillages).
• Niveau quatre (4) : haute automatisation (ne nécessite pas que le conducteur prenne le
relais).
• Niveau cinq (5) : automatisation complète (identique au niveau quatre, mais il peut
conduire partout dans toutes les conditions).
Les véhicules utilisés dans 5GCroCo vont du niveau 0 au niveau 3.
27Vous pouvez aussi lire