Le machine learning en tant qu'aide dans - Vladimir Bagazov
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
Le machine learning
en tant qu'aide dans
les problématiques
d'un scan 3D
Lundi 3 octobre 2016
BAGAZOV Vladimir
Accessibilité
Objectif:
• Pas de formules mathématiques
• Pas de code
Des connaissances ?
Et si on partait plutôt du besoin ?
03/10/2016 3
Plan
ASR Informatique
Produit Scan 3D - SuriCAD
Problématique à résoudre
Machine Learning
Quelques résultats
Limites et critiques
Ouverture
03/10/2016 4
Quelques chiffres
Année de création
1998
Sites à Couëron
Pôles
et St Herblain
3 2
ASR
Informatique
CA en 2015 (K€)
17 Collaborateurs / Partenaires
841
+3
03/10/2016 5
ASR : l’innovation permanente
Innovation Cas d’usage
Reconnaissance de Permet de numériser
2006 l’écriture via un des documents
crayon optique immédiatement
Reconnaissance des
Contrôle des CNI,
2012 caractères sur
passports, chèques …
Smartphone Android
Modélisation 3D
Plan 2D, 3D,
2016 temps réel sur
Conformité etc…
tablette
03/10/2016 6
Vladimir Bagazov
ASR-Informatique
Innovation Infrastructure
03/10/2016 7
Equipe
ASR-Informatique
Innovation Produit Infrastructure
03/10/2016 8
Plan
ASR Informatique
Produit Scan 3D - SuriCAD
Problématique à résoudre
Machine Learning
Quelques résultats
Limites et critiques
Ouverture
03/10/2016 9
Présentation de SuriCAD
Au commencement : une anecdote…
Pour
Mais
Qui
Doit
Donc
Entreprise Réaliser un Prendre Beaucoup Marché
menuiserie devis des cotes demandes perdu
03/10/2016 10
SuriCAD
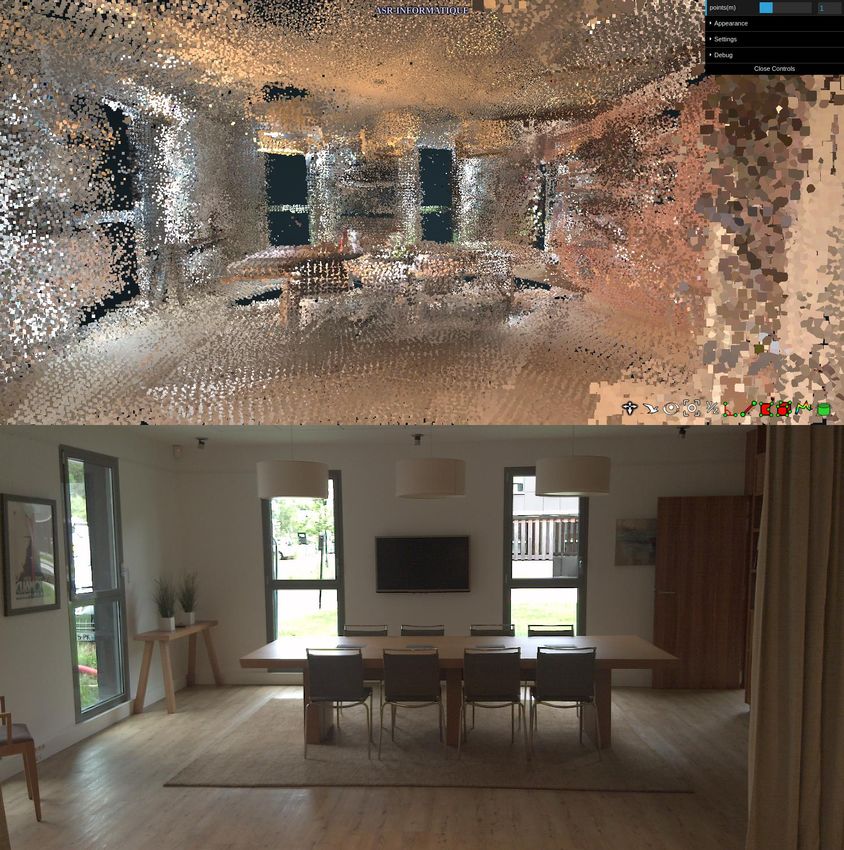
Besoin Technologie Solution
• Métré • Tango • SuriCAD
Nuage de points
Figure 1 : Illustration tablette tango 03/10/2016 11SURICAD
Figure 2 : Photo d’un scan en cours dans nos locaux
03/10/2016 12Notre réponse : SuriCAD
Fonctionnalités :
Calcul de surface
Prise des cotes
Génération de plan théorique 2D
Validation Scan 3D avec plan 2D
Contrôle dimensionnel
Contrôle de complétude
Connexions avec des logiciels du
marché
Figure 3 : Comparaison de distances mesurées (en haut)
réelles (en bas) 03/10/2016 13Démarche proposée
Figure 4 : Exemple de plan embryonnaire Figure 5 : Exemple de plan
03/10/2016 14Plan
ASR Informatique
Produit Scan 3D - SuriCAD
Problématique à résoudre
Machine Learning
Quelques résultats
Limites et critiques
Ouverture
03/10/2016 15Problématique : surfaces & ouvertures
Objectifs :
Surface
Comment calculez-vous la surface au sol dans le cas suivant ?
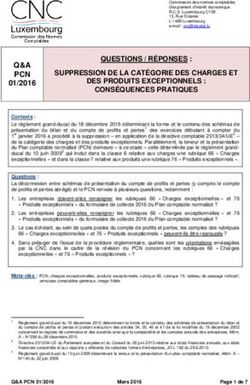
Figure 6 : Scan automatique (à gauche) généré à partir du nuage de points (à droite)
Faire bénéficier de cette information dans le plan 2D généré
03/10/2016 16Difficultés d’évaluer une absence
Les points permettent beaucoup de traitements et détections
Détection de formes (mobilier)
Clustering (selon couleur et modèle théorique)
Etc.
Le problème :
Une ouverture (une fenêtre ou un trou) => absence de points
Pas de points :
• Pas de couleur Figure 7 : Exemple de rectangle candidat
• Pas de texture
• Origine inconnue (trou réel ou scan incomplet)
03/10/2016 17Plan
ASR Informatique
Produit Scan 3D - SuriCAD
Problématique à résoudre
Machine Learning
Quelques résultats
Limites et critiques
Ouverture
03/10/2016 18Machine Learning
« L'émancipation de l'erreur est la condition de la
connaissance réelle. » Henri-Frédéric Amiel
03/10/2016 19Démarche proposée
Nuage de point
Segmentation
Model Planaire
Plan Vertical : mur isolé
Extraction de rectangles
(zones vides)
Rectangles
Extraction indicateurs
Arbre de décision
Base d’apprentissage
03/10/2016 20La base de données
support d’apprentissage
Constitution de la base de données
Un nuage de points comportant des ouvertures (portes, fenêtres, …)
Source : Jacob University
Identification des ouvertures
Cas intéressant : une fenêtre ouverte => double résultat (cadre + trou)
Attention : Certains algorithmes probabilistes => sensibilité à la proportion
03/10/2016 21Indicateurs
Indicateurs (features) :
1. surface du candidat
2. ratio hauteur/largeur
3. largeur candidat/largeur surface (mur)
4. hauteur candidat/hauteur surface (mur)
5. distance horizontale selon le bord gauche(mur)
6. distance horizontale selon le bord droit
7. distance verticale selon le bord haut
8. distance verticale selon le bord bas (mur)
9. distance moyenne entre les points et le périmètre du rectangle
03/10/2016 22Outils et Alogorithmes
Bibliothèques utilisées :
: The Point Cloud Library 3-clause BSD Licence
PointCloud.org
: Orange GNU Licence
Algorithmes :
Classification tree : modèle prédictif basé sur l’utilisation d’un arbre de décision
Linear SVM (Support Vector Machine): machines à vecteurs de support.
Apprentissage supervisé à partir d'une DB afin d’obtenir le paramétrage
optimal pour un modèle donné.
03/10/2016 23Plan
ASR Informatique
Produit Scan 3D - SuriCAD
Problématique à résoudre
Machine Learning
Quelques résultats
Limites et critiques
Ouverture
03/10/2016 24Résultats
Matrices de confusions
Classification Tree sans SVM Classification Tree avec SVM
03/10/2016 25Plan
ASR Informatique
Produit Scan 3D - SuriCAD
Problématique à résoudre
Machine Learning
Quelques résultats
Limites et critiques
Ouverture
03/10/2016 26Limites et Critiques
Limites actuelles
L’information issue uniquement des rectangles
Base d’apprentissage trop petite
Pas de prise en compte des connaissances métier
Ex : Hauteur d’allège (distance sol - bas de fenêtre)
Types spécifiques
Ex: Vitrage quadrillé
Figure 8 : Photo d’ouverture quadrillée
D’autres Indicateurs :
Variation intensité lumineuse (indoor/outdoor)
Opacité infrarouge (le verre absorbe les IR)
Heuristique d’occlusion (+ d’occlusion sur les mures que les fenêtres)
Sources : Automatic détection of Window Regions in Indoor Point Clouds Using R-CNN
03/10/2016 27Plan
ASR Informatique
Produit Scan 3D - SuriCAD
Problématique à résoudre
Machine Learning
Quelques résultats
Limites et critiques
Ouverture
03/10/2016 28Ouverture
Et maintenant…
Amélioration de la construction de la base de données (interactivité)
Combinaison des rectangles
Ajout d’information sur l’environnement
Plantes vertes
Radiateur
Rideaux
Poignées
Des idées ?
03/10/2016 29Vladimir BAGAZOV
Chef de projet produit
vladimir.bagazov@asr-informatique.fr
+33 2 85 52 42 98
+33 6 70 18 99 28
MERCI !
Place aux questions
01/07/2016
3
0Références
Références
Arachchige et Maas, Automatic Building Facade Detection in Mobile Laser
Scanner point Clouds (2012)
Adan et Huber, 3D Reconstruction of Interior Wall Surfaces Under Occlusion
and Clutter (2011)
Hiller, Zhang, Tianhao Zhang, Zihao Zhang. Automatic Detection of Window
Regions in Indoor Point Clouds Using R-CNN (2014)
Girshick Donahue Trevor Darrell Jitendra, Rich feature hierarchies for accurate
object detection and semantic segmentation (2014)
01/07/2016 31Domaines d’application
01/07/2016 32MERCI ! Nous sommes à votre
disposition pour toute
ASR 2 Sites information complémentaire
Michel CHATY
Contact contractuel
+33 (0)6 14 39 49 33
michel.chaty@asr-informatique.fr
Lionel MATHIEU
Contact commercial
+33 (0)6 76 53 84 69
lionel.mathieu@asr-informatique.fr
ASR (Siège)
Le Tertre Saint-Yves
44220 CouëronAutres exemples
01/07/2016 19Autres exemples
01/07/2016 20Autres exemples
01/07/2016 21Vous pouvez aussi lire