Etude sur la structure en par - fabriqué - Icam
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
Etude sur la structure en treillis fabriqué par impression 3D pour l’amélioration des transferts thermiques Dans le cadre du projet européen nous cherchons à développer et optimiser un dissipateur thermique pour l’électronique de puissance en utilisant la fabrication additive. Suite à une étude numérique paramétrique, un modèle sera fabriqué et ses performances thermiques seront évaluées et comparées au système actuel. L’objectif principal du projet européen RECET4RAIL est d’introduire de nouvelles technologies dans le secteur ferroviaire, afin d’améliorer les performances du système ferroviaire à tous points de vue, tout en réduisant le coût global d’exploitation du cycle de vie. L’Icam est en charge du développement d’un nouveau dissipateur thermique fabriqué par la fabrication additive. Une étude paramétrique est déjà initiée sur trois géométries de structures lattice élémentaire à différentes configurations de fonctionnements. Dans ce projet de recherche et dans un premier temps, vous allez continuer cette étude paramétrique pour aider à choisir le design final le plus efficace. Dans un deuxième temps, et après la fabrication du premier modèle expérimental, vous allez évaluer sa performance thermique sur un banc expérimental à monter l’Icam.
Conception et réalisation d’un banc expérimental afin d’explorer la faisabilité du stockage thermique par une structure GNE/mélange binaire aqueux Le stockage d’énergie thermique est une solution permettant d’augmenter l’efficacité, de diminuer la puissance à installer et/ou d’améliorer l’intégration dans des smart grids de systèmes énergétiques. L’intensification des systèmes de stockage nécessite l’emploi de matériaux à changement de phase (MCP). Ces MCP ont rarement des bonnes conductivités ce qui entrave les performances du système de stockage (faible puissance). Pour résoudre ce problème, il est proposé de travailler avec des assemblages composites de MCP incorporés dans une matrice conductrice. Le Graphite Naturel Expansé (GNE) est un bon candidat pour faire office de matrice conductrice. La température de stockage souhaitée sera le critère déterminant pour le choix du MCP (huile, paraffine, sucre, sel, etc.). Cette technologie de stockage, pour des températures entre 40 °C et 120 °C, a déjà été explorée par nos équipes. Nous cherchons à présent à explorer la faisabilité de stocker de la chaleur à plus basse température (de -15 °C à 0 °C) pour des applications frigorifiques ou de climatisations. Les mélanges d’eau et d’antigel semblent être des bons MCP. L’objectif du projet est de réaliser un système de stockage
expérimental composé d’une plaque de GNE baignant dans une
cuve remplie d’un mélange d’eau et d’antigel. Ce système
permettra de quantifier expérimentalement les performances que
l’on peut obtenir avec ces matériaux. Il permettra également
d’identifier de possibles verrous scientifiques qui pourraient
générer l’utilisation de cette technologie (surfusion,
délaminage par dilatation, etc.).
Projet Santé 4.0
La pandémie de la COVID a mis à jour les difficultés de
l’hôpital en termes de performance afin de mieux répondre aux
attentes des patients mais aussi aux conditions de travail des
soignants, ainsi qu’à la préservation de leur santé
(sécurité). L’Icam site de Paris Sénart a décidé de travailler
sur un thème de recherche très fort et en cohérence avec le
bassin de Grand Paris Sud : la santé 4.0. Il s’agit
d’introduire dans ces domaines les concepts de l’industrie 4.0
et de l’intelligence artificielle pour améliorer la
performance globale des hôpitaux. Ce projet porte sur
l’exploitation des nouvelles technologies et de l’intelligence
artificielle pour concevoir et réaliser des prototypes de
produits technologiques « low cost » ou outils pour les
soignants ou les patients.
Le mémoire proposé a pour but :
d’aider au développement d’un dispositif de détection de
bulles dans le sang lors d’opérations cardiaques
réaliser un dispositif d’auto-évaluation de la
polyarthrite rhumatoïde à l’aide d’outils connectés
de réaliser une main connectée intelligente et low-cost
de réaliser un dispositif d’audit intelligent du lavage
de mains des soignants avant les opérations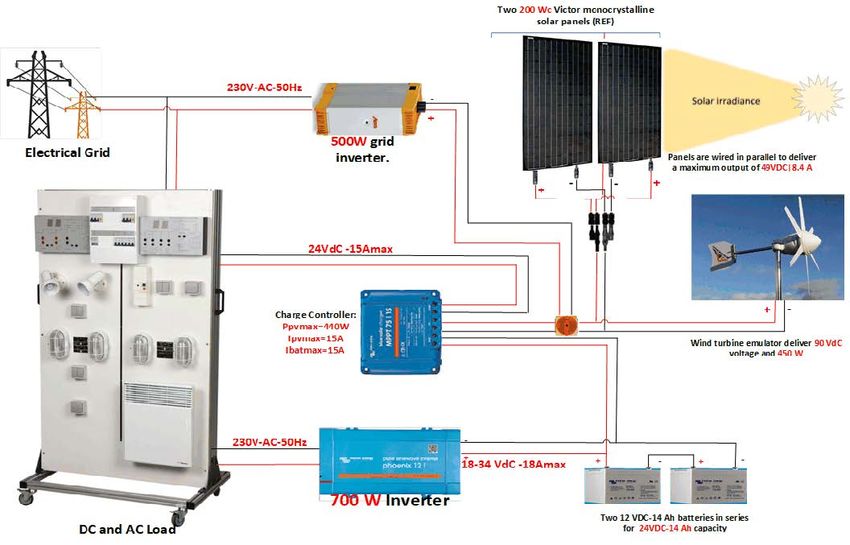
chirurgicales
Ces thèmes seront traités par deux groupes et nécessite des
connaissances en IoT et en intelligence artificielle (Deep
learning, machine learning, réseau de neurones, etc.).
Projet DIGICOLDT (Logistique
urbaine)
La pandémie de la COVID a mis à jour les difficultés de
l’hôpital en termes de performance afin de mieux répondre aux
attentes des patients mais aussi aux conditions de travail des
soignants, ainsi qu’à la préservation de leur santé
(sécurité). L’Icam site de Paris Sénart a décidé de travailler
sur un thème de recherche très fort et en cohérence avec le
bassin de Grand Paris Sud : la santé 4.0. Il s’agit
d’introduire dans ces domaines les concepts de l’industrie 4.0
et de l’intelligence artificielle pour améliorer la
performance globale des hôpitaux. Ce projet porte sur
l’exploitation des nouvelles technologies et de l’intelligence
artificielle pour améliorer la performance logistique de
l’hôpital : Healthcare logistics 4.0.
Le mémoire proposé a pour but :
d’aider au développement de l’outil d’aide à
l’amélioration de la performance logistique globale de
l’hôpital
de réaliser sur un hôpital la validation des concepts
développés à travers l’amélioration de performance
de réaliser le jumeau virtuel de l’hôpital étudié
(simulation détaillée).
Projet DIGICOLDT (Logistique
urbaine)
Grand Paris Sud est composée d’une vingtaine de communes sur
deux départements, l’Essonne et la Seine et Marne. Ce
territoire est un important bassin pour les entreprises de
logistique. De nombreuses plateformes se sont installées,
grâce à l’action de L’EPA de Sénart et de l’Agglomération de
Grand Paris Sud. Les entreprises du territoire sont pour la
plupart tournées vers le transport, la logistique, le
stockage, et le e-commerce. Le territoire du Grand Paris Sud
est un important bassin logistique dû à la proximité de Paris.
Le trafic routier est assez important sur le territoire de
Sénart (N104 et A5). L’axe de l’A5 est par exemple sujet à de
nombreuses congestions de véhicules. Des travaux de recherche
ont donc été lancés par l’Icam pour comprendre l’origine de
ces perturbations et proposer une solution soutenable de
transport de marchandises (alternative à la route), qui
satisfait les usagers, les citoyens, les collectivités
territoriales et les entreprises du territoire. Une plateforme
collaborative de co-création et co-innovation (DIGICOLDT) doit
être développée par l’Icam pour concevoir la solution faisant
consensus et s’adaptant au mieux au bassin de GPS. La méthode
mise en place pour ce développement est la méthode agile.
Le mémoire proposé a pour but :
d’aider au développement de l’outil DIGICOLDT
de réaliser la construction de solutions soutenables de
transport alternatives à la route (étude complète)
de réaliser l’enregistrement des solutions proposées par
les acteurs du territoire (autorités locales, citoyens,
entreprises)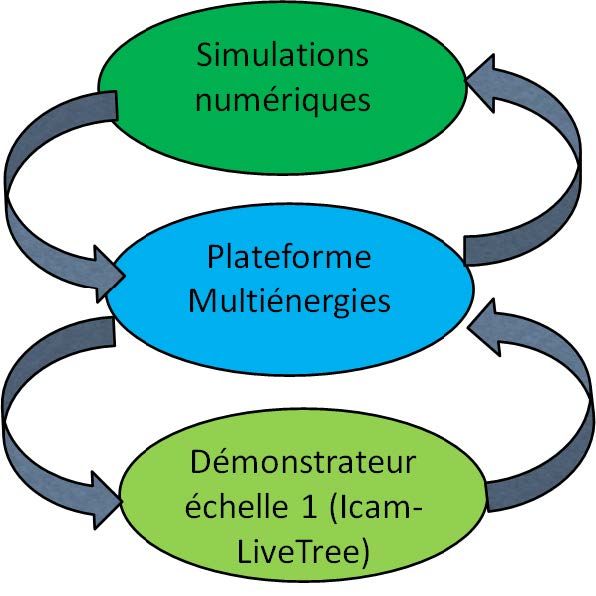
de réaliser et améliorer les modèles de simulation de la
situation actuelle et des scénarios d’amélioration
(outils PTV VISSIM, Flexsim, Anylogic)
Entrepôt 4.0
L’Icam va implanter à partir de septembre prochain dans les
nouveaux bâtiments, une plateforme Logistique et Industrie du
futur écologique (LIFE). Deux lignes de production (depuis la
zone de stockage de matières premières jusqu’à celle de
stockage de produits finis) seront mises en place : une pour
la fabrication de cartes électroniques et l’autre pour celle
de petits robots.
Le mémoire proposé a pour but :
d’aider à la mise en place technique de la plateforme
concevoir et développer l’entrepôt 4.0 qui sera implanté
dans la plateforme (Transstockeur)
de résoudre des cas d’usages d’entreprises traités par
l’Icam sur le concept d’entrepôt intelligent et
automatisé
de résoudre des cas d’usage d’entreprises intégrant
l’utilisation de l’IoT dans la chaine logistique
d’intégrer l’intelligence artificielle dans la
résolution des cas d’usage d’entreprises
de concevoir et développer le jumeau virtuel de cet
entrepôt 4.0 avec exploitation des réalités immersives
(virtuelle et augmentée)Démonstrateur Logistique et
industrie du futur écologique
(LIFE)
L’Icam va implanter à partir de septembre prochain dans les
nouveaux bâtiments, une plateforme Logistique et Industrie du
futur écologique (LIFE). Deux lignes de production (depuis la
zone de stockage de matières premières jusqu’à celle de
stockage de produits finis) seront mises en place : une pour
la fabrication de cartes électroniques et l’autre pour celle
de petits robots.
Le mémoire proposé a pour but :
d’aider à la mise en place technique de la plateforme
de résoudre des cas d’usages d’entreprises traités par
l’Icam pour l’optimisation de la performance
industrielle d’une chaine de production (lean
manufacturing, SMED, DMAIC)
de résoudre des cas d’usage d’entreprises intégrant
l’utilisation de robots mobiles et de cobots dans la
chaine de production
d’intégrer l’intelligence artificielle et les IoTs dans
la résolution des cas d’usage d’entreprise
de concevoir et réaliser d’une interface homme-machine
pour faciliter la gestion de leurs missions communesDéformations et contraintes résiduelles en fabrication additive métallique La fabrication additive métallique permet la réalisation de géométries non ou difficilement accessibles par des procédés « classiques » de mise en forme. Mais la consolidation de poudres ou de fils métalliques, que ce soit par refusion (méthodes de fabrication additive par dépôt sous faisceau haute énergie ou par refusion sur lit de poudre) ou frittage (frittage sélectif sur lit de poudre, binder jetting, ou extrusion de fil composite), pose des problèmes de stabilité dimensionnelle en cours de fabrication. Les déformations, voire les ruptures, apparaissent en cours de fabrication ou juste à la fin. Ainsi, afin de fiabiliser la fabrication additive métallique, il convient de déterminer les causes de ces déformations, et de les quantifier afin de les prévoir et de les corriger. Le projet de cette période s’inscrit dans la continuité de projets menés précédemment sur le procédé de fabrication additive ADAM (atomic diffusion additive manufacturing). Ce procédé est réalisé en deux étapes principales : la fabrication de la géométrie par extrusion d’un fil composite, constitué de particules métalliques enrobées dans un liant polymère, puis le traitement thermique de déliantage (élimination du liant) et frittage (consolidation des particules métalliques entre elles). Les paramètres que l’on a pu faire varier sont surtout liés à l’extrusion du fil : sens de dépôt, épaisseur de couche, ratio de paroi (pour une pièce pleine, rapport entre l’épaisseur de paroi et l’épaisseur totale), géométrie globale, ainsi que la nature de l’alliage déposé. Les résultats obtenus montrent que les déformations sont
générées essentiellement lors du frittage, car le retrait n’est pas véritablement isotrope. Or les matériaux utilisés sont des matériaux qui nécessitent des traitements thermiques pour garantir l’optimum de leurs propriétés mécaniques. L’objectif du projet est désormais d’étudier la réponse au traitement thermique (cumulé aux opérations de mise en forme et frittage précédentes) en termes de déformation et de propriétés mécaniques des matériaux mis en oeuvre, à savoir le 17-4 pH et l’acier à outil A2. En particulier, on s’attachera à comparer les propriétés de ces matériaux obtenues via la fabrication d’éprouvettes, ou via le prélèvement d’éprouvettes dans des pièces de géométrie complexe (structures lattice par exemple). Fabrication durable à partir de poudres métalliques La fabrication additive métallique permet la réalisation de géométries non ou difficilement accessibles par des procédés « classiques » de mise en forme et connaît un grand engouement dans de nombreux secteurs industriels. Une majorité des procédés utilise des poudres métalliques comme matériau de départ. Mais l’obtention de ces poudres se fait par des procédés relativement couteux énergétiquement et par conséquent d’un point de vue environnemental. Le projet est d’étudier la faisabilité de production de poudres métalliques à partir de déchets métallurgiques. De façon non chronologique, l’étudiant(e) abordera différents aspects : identification des déchets et des procédés utilisables (sur site et en général) ; expérimentation de l’électrolyse de solutions chargées d’ions métalliques ;
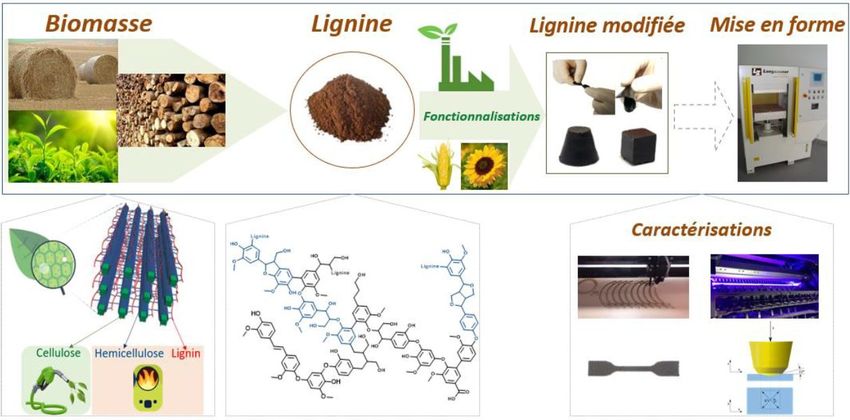
analyse des consommations et des rejets de ce type de procédé ; étude des options technologiques pour former de petites sphères à partir de ce procédé ; étude des options technologiques pour broyer des copeaux ; expérimentation de broyage, tamisage, et analyse des consommations du procédé. Fabrication et étude de nouveaux matériaux biosourcés Aujourd’hui, la très grande majorité des matériaux plastiques a pour origine l’industrie pétrolière. Dans un contexte de transition écologique et de réduction de la dépendance au pétrole, la recherche de nouveaux matériaux biosourcés d’origine végétal e est en plein essor. Les premiers matériaux biosourcés tels que le PLA offre de premières alternatives aux plastiques usuels, cependant leurs propriétés mécaniques et leurs durabilités s’avèrent insuffisante s pour des applications plus techniques. Un autre biopolymère végétal pourrait ajouter ces propriétés : La Lignine. Actuellement extraite en tant que déchet à hauteur de 70 millions de tonnes par les in dustries papetières et les bioraffineries, la lignine offre de nouvelles opportunités pour des plastiques plus respectueux de l’environnement. L’objectif de ce projet de recherche est de valoriser la lignine, afin de la substituer aux matériaux pétrosourcés actuels. En coopération avec l’Université de Lille chargé de la transformation de la lignine, vous aurez à mettre en forme des
mélanges de biopolymères à l’aide d’une presse chauffante. Puis de les caractériser afin de les comparer aux plastiques du marché. Les paramètres de la presse ainsi que des proportions en matières premières devront être optimisés afin d’obtenir les meilleures performances. Valorisation de plantes issues de la culture sur sols contaminés Le déclin des industries sidérurgiques et minières, sur le territoire du Nord de France, a engendré l’apparition de friches, caractérisées par des contaminations variées. La contamination des sols par les polluants organiques et inorganiques est une problématique majeure. Des techniques douces de remédiation, reposant sur l’utilisation de plantes bioaccumulatrices, sont étudiées pour gérer ces sols, notamment avec la culture de miscanthus et de chanvre.
Actuellement, la valorisation de ces plantes bioaccumulatrices s’effectue par voie énergétique. Or, ces plantes peuvent être sources de molécules d’intérêt et peuvent donc être valorisées grâce à l’extraction de ces biomolécules fonctionnelles. Pour extraire ces biomolécules, des procédés innovants, dits éco- procédés, permettent d’obtenir de meilleurs rendements d’extraction en utilisant moins de temps, des solvants sûrs, moins d’énergie et en générant moins d’impacts environnementaux. En collaboration avec Junia-ISA et l’UMRt BioEcoAgro-Institut Charles Viollette (Polytech’Lille-Université de Lille), le projet de mémoire vise à identifier des voies de valorisation des plantes à l’aide des techniques d’éco-extraction. Les plantes nous sont fournies par le laboratoire Environnement LGCgE-ISA. Trois éco-procédés d’extraction seront étudiés et comparés à des extractions conventionnelles : l’extraction assistée par ultrasons, l’extraction assistée par microondes, et l’extraction assistée par microondes et ultrasons. Les performances de ces procédés (rendements d’extraction, activité des extraits, énergie consommée, impacts environnementaux) en régime batch seront évaluées en cherchant les conditions optimales répondant aux critères de rendement et d’évaluation environnementale. Les extraits obtenus seront analysés (spectrophotométrie UV-Visible) pour déterminer les molécules présentes dans l’extrait ainsi que leur concentration. Couplage hydro-chimio-
mécanique dans les polymères : Analyse expérimentale Les polymères offrent de nouvelles opportunités dans un large éventail d’applications notamment dans le traitement des eaux usées, dans l’ingénierie biomédicale et dans le stockage d’énergie. Dans la plupart de ces applications, un couplage fort entre le comportement mécanique et l’environnement chimique existe. L’objectif de ce MSR est de caractériser le couplage hydro- chimio-mécanique dans un polymère. En collaboration avec l’Université de Lille, Il s’agira tout d’abord d’élaborer le matériau sous forme d’éprouvette. Deux techniques seront comparées, l’impression 3D et le moulage. Il s’agira ensuite de caractériser expérimentalement le matériau afin d’établir la relation élaboration-structure-propriétés. Les essais seront conduits de manière découplée (effet de l’environnement chimique et thermique) ou de manière couplée dans des machines d’essais mécaniques de traction (monotones et cycliques) sous différents environnements chimiques et thermiques.
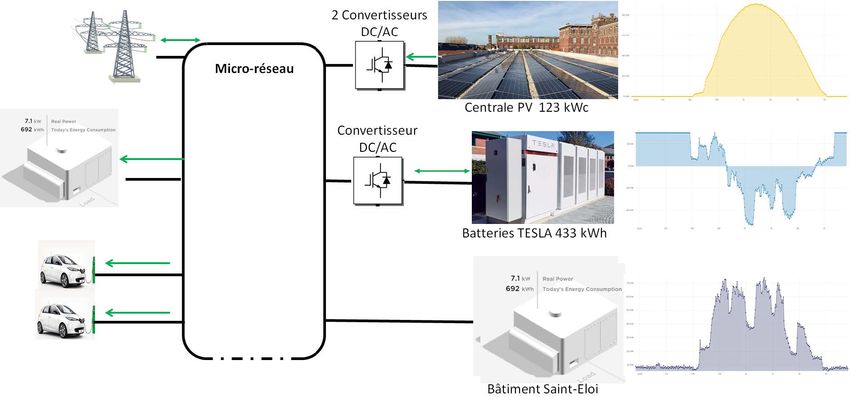
Chaire Sens et Travail – Année 2021-2022 https://www.icam.fr/wp-content/uploads/2021/06/Msr-Besoins-Cha ire-S1-2021-2022-1.m4v Réalisation d’une plateforme de recherche multi-énergies connectée L’Internet des objets ou Internet of Things (IoT) est un domaine en pleine expansion. L’IoT est défini comme étant un réseau d’objets interconnectés et communicant via différents protocoles normalisés. Le secteur de l’électricité vit actuellement une grande mutation technologique. En effet, on est en train de passer d’un monde où la consommation est prédictible et la production planifiée à un monde où la production est difficilement prévisible (énergies renouvelables intermittentes) et l’exigence d’une consommation planifiée. Les objets connectés offrent potentiellement la possibilité de rendre visible le coût instantané de l’électricité. Ce qui permettra aux gestionnaires d’énergie d’optimiser leurs réseaux en temps réel. Dans le cadre du projet LiveTree, l’Icam s’est doté d’un système de production d’énergie par panneaux photovoltaïques d’une puissance de 123 kWc ainsi qu’une batterie de stockage
électrochimique de 433kWh (figure 1). Il s’agit d’une installation en autoconsommation avec stockage. Typiquement, si la production d’origine photovoltaïque est supérieure à la consommation, la batterie stocke le surplus d’énergie qu’elle resitue lors de la phase nocturne afin, par exemple, de recharger des voitures électriques. Figure 1 : Description du Micro-réseau de l’Icam Cette installation industrielle (échelle 1) présente néanmoins l’inconvénient d’être peu utilisable pour l’expérimentation et la recherche (puissances importantes, risques électriques, etc). Notre objectif est de développer une plateforme à échelle réduite du Micro-réseau de l’Icam afin de pouvoir tester des stratégies innovantes de gestion de l’énergie. L’architecture de cette plateforme expérimentale est décrite par la figure 2.a. À terme, les travaux de recherche envisagés auront pour principale tâche de développer, de tester et de valider des algorithmes de contrôle/commande sur la plateforme expérimentale avant de les implémenter sur le démonstrateur LiveTree. L’approche méthodologique est décrite par la figure 2.b.
Figure 2.a : Architecture de Plateforme Multi-énergies
Figure 2.b : L’approche de développement envisagée
Comme illustré sur la figure 2.a, on dispose à l’Icam des
équipements suivants :
panneaux PV,
un émulateur d’éolienne,
un dispositif de stockage électrochimique,
charges électriques,
station météorologique,
capteurs filaires
automates industriels.
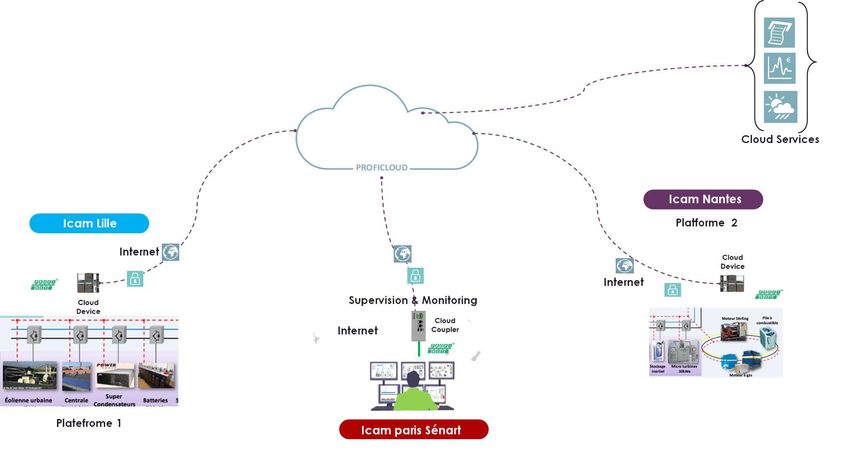
Cette plateforme est aujourd’hui instrumentée, et des
actionneurs tout ou rien ont été implémentés afin de basculerentre les différents modes de fonctionnement. L’un des objectifs de ce projet est de rendre cette plateforme accessible aux chercheurs du groupe Icam via le Cloud comme l’illustre la figure 3. Figure 3 : Plateforme multi-énergies connectée. Développement et réalisation d’une plateforme de caractérisation de matrice capteurs à ondes acoustiques de surface pour la détection
multivariée de gaz toxiques. La pollution de l’air représente un enjeu de santé publique. En effet, le dernier rapport de l’Agence Européenne de l’Environnement (AEE) publié fin 2019, souligne que la plupart des personnes qui vivent dans des villes européennes sont exposées à de l’air de mauvaise qualité et que les concentrations en polluants et notamment, en particules fines tels que les oxydes d’azote (NOx), les composés organiques volatils (COV)) et l’ozone (O3), continuent d’avoir d’importantes répercussions sur l’état de santé des citoyens européens, ce qui conduit forcément à l’aggravation de certaines pathologies chroniques telles que des maladies cardiovasculaires et respiratoires … etc. Le contrôle de l’environnement nécessite donc la mesure de ces différentes espèces de gaz et particules par un ensemble de capteurs spécifiques et sélectifs. Les dispositifs à ondes élastiques de surface (SAW) sont des moyens de détection en plein essor à la fois rapides, efficaces et peu coûteux. Ces dispositifs de détection ont connu ces dernières années un développement assez remarquable grâce aux demandes de contrôle dans différents domaines tels que l’environnement, la santé, la sécurité publique et industrielle. L’étude de ces dispositifs, dans le cadre de notre projet, est particulièrement intéressante car elle vise à résoudre un verrou technologique qui consiste à trouver un moyen de développer une plateforme multicapteurs permettant la discrimination de plusieurs types de gaz en même temps et ceci grâce à l’utilisation de méthode d’intégration Bottom-Up de molécules par méthode d’électropolymérisation. Le mémoire proposé a pour but d’étudier les caractéristiques électriques de capteurs à ondes acoustique de surface organiques (SAW). Le / la stagiaire participera à la mise en place d’un banc de mesure permettant la caractérisation fréquencielle de ces capteurs en utilisant un analyseur de
réseau vectoriel (VNA). L’objectif est d’étudier le comportement de ces capteurs à la suite d’une excitation extérieur (exposition à des gaz), le stagiaire s’intéressera en particulier à l’étude des paramètres S, S12 de transmission et S11 de réflexion. Ces informations sont nécessaires pour optimiser la fabrication de ces dispositifs, notamment au moment de la fonctionnalisation des capteurs. Nanofabrication Responsable et Durable : aide à la constitution d’un réseau international Dans le cadre du Projet européen H2020 NanoFabNet Les nanotechnologies et la fabrication à l’échelle nanométrique (nanofabrication) sont des technologies très prometteuses aux applications multiples (énergie, environnement, construction, alimentation, médecine, etc.). Elles font néanmoins l’objet d’inquiétudes sanitaires, environnementales et éthiques. Le projet européen H2020 NanoFabNet vise à promouvoir le décollage de la nanofabrication à l’échelle européenne d’une manière durable et responsable, par la création d’un réseau international garantissant un haut niveau de certification dans les différents domaines de la nanofabrication (aspects techniques comme aspects sociétaux). L’ICAM y est responsable d’un grand volet sur la « Durabilité globale », recouvrant les questions de risques sanitaires et environnementaux, d’analyse de cycle de vie, d’éthique et de gouvernance.
Le binôme MSR recruté aura pour mission une assistance à la création du réseau international NanoFabNet, dans le cadre des tâches relevant de l’ICAM pour ce projet. Il pourra notamment être mobilisé : a) dans la mise à disposition, sur le site internet du réseau, d’une bibliographie actualisée (articles scientifiques, thèses, ouvrages, …) sur les différents volets de la durabilité de la nanofabrication ; b) dans la constitution de la base de données du réseau, consignant les organisations partenaires, les infrastructures de recherche, les projets en cours, etc. ; c) dans la réalisation d’un sondage auprès des organisations partenaires sur leurs pratiques et besoins en termes de durabilité globale (analyses de risques, analyses de cycle de vie, analyses éthiques concernant leurs productions en termes de nanoproduits et de nanomatériaux, etc.) ; dans la définition de la stratégie de développement du réseau au regard du paysage européen et international de la nanofabrication. Eco-extraction en continu de biomolécules à partir de co- produits agro-alimentaires Les co-produits de l’industrie agro-alimentaire, actuellement considérés comme des déchets, sont sources de molécules d’intérêt et peuvent donc être valorisés grâce à l’extraction de ces biomolécules fonctionnelles. Les extraits obtenus peuvent être utilisés en tant qu’ingrédients alimentaires ou cosmétiques. Pour extraire ces biomolécules, des procédés innovants, dits «éco», permettent d’obtenir de meilleurs rendements d’extraction en utilisant moins de temps, des solvants sûrs, moins d’énergie et en générant moins d’impacts
environnementaux. Néanmoins, ces procédés sont étudiés surtout en mode batch sur des volumes relativement petits à l’échelle laboratoire. En vue de préparer la réalisation des éco- extractions sur des niveaux de TRL plus grands (pilote, industriel), le projet de thèse vise à étudier l’efficacité de différents éco-procédés d’extraction pour la récupération d’antioxydants à partir de co-produits issus d’industrie agro- alimentaire régionale en travaillant en régime continu. Trois éco-procédés d’extraction seront étudiés : l’extraction assistée par ultrasons, l’extraction assistée par microondes, et l’extraction assistée par microondes et ultrasons. Les performances de ces procédés (rendements d’extraction, activité des extraits, énergie consommée, impacts environnementaux) en régimes batch et continu seront évaluées en cherchant les conditions optimales pour le traitement et la valorisation de volumes importants de co-produits. Laboratoire(s) de Rattachement : UMR-T 1158 BioEcoAgro, Institut Charles Viollette Characterization of the surface roughness of roadways by Ground Penetrating Radar Context: Ground penetrating radar (GPR) is a common tool for nondestructive testing of civil engineering materials, environment and agriculture. It allows rapid data collection and is widely used to measure or to estimate media parameters (pavements, bare agricultural fields, soils…).
Here, we are interested in roadways probed by GPR, in the context of wide band GPR, such that the roughness of the pavement surface cannot be neglected anymore. Electromagnetic wave scattering from a rough interface leads to less energy being recorded by the receiver in the specular direction. This should be accounted for in order to accurately retrieve the EM (electromagnetic) properties of the sounded pavement. Nondestructive testing is also of great interest in order to analyze the structural health of the pavement material. Indeed, it is important to be able to detect embedded cracks inside the material, because they are diagnosis elements which influence the application of maintenance and management policies. Project description: The first goal of this study is to analyse measurement data of the surface roughness of three samples of pavement surfaces, obtained by photogrammetry. The main objective of this task is to study the main statistical parameters that describe the surface roughness: height probability density function (PDF) and height autocorrelation function. Then, two options are possible. The first option is to make comparisons between two computation codes (two different numerical methods). The first one is a frequency domain integral method, based on the method of moments, that has been developed in the IETR laboratory. The second method is a time domain open source code called gprMax (see https://www.gprmax.com/), which is based on the FDTD algorithm. The interest of this comparison is to better identify the limitations of these two codes. The second option is to develop an approximate analytical EM model for taking the roughness into account in order to invert GPR signals. This work will be compared with the classical model called Ament model [1], which has the advantage of being easily invertible. Its main advantage is that the main
roughness parameter, the RMS (root-mean square) height, is easily retrieved. Nevertheless, its associated drawback is that it is independent of the surface auto-correlation, implying that it cannot be used to estimate the correlation length. Thus, the aim of this task is to derive an asymptotic model that can be used to retrieve both the RMS (root mean square) height and the correlation length, by inverting synthetic or even real data. This may be a model sounded by physical considerations [2] or an empirical one based on either simulation or measurement data. This model will be validated thanks to the reference use of a numerical method based on the method of moments [3]. References: [1] W. S. Ament, “Toward a theory of reflection by a rough surface,” Proceedings of the Institute of Radio Engineers, vol. 41, no. 1, pp. 142–146, 1953. [2] T. Elfouhaily, C.A. Guérin, “A critical survey of approximate scattering wave theories from random rough surfaces,” Waves in Random Media, vol. 14, R1-40, 2004. [3] C. Bourlier, N. Pinel, and G. Kubické, Method of Moments for 2D Scattering Problems: Basic Concepts and Applications, Wiley-ISTE, London, 2013. Requested skills: The applicant should have knowledge / skills in electromagnetics, as well as applied mathematics (probability and statistics, analysis).
Computer vision and machine learning for basketball training optimization Support for Skill Acquisition in Youth Basketball Context Young players training is often devoted to undersized staff within organisations such as associations mostly composed of volunteers in France for youth basketball. It frequently happens to have 1 single trainer for 10 to 16 players in a training session. Moreover, most of the teams don’t train more than twice a week. Therefore, skill acquisition ought to be efficient! Whereas trainer education remains the key factor for better training, new technologies based on Computer Vision and Machine Learning could be of great support in such a process. This project aims at providing youth basketball trainers real-time video analysis toolings in order to improve skill acquisition, its outcomes, its duration, etc. Objectives The preliminary work ot this project consists in investigating the best camera settings according to several analysis features. It will then provide the prerequisite tooling for addressing the overall goal. In fact, it also consists in developing both video acquisition systems and analysis feature processings in order to assess which is the best one according to the evaluation criterion below.
Tasks
This work then consists of:
1. developing the video acquisition systems that correspond
to the camera settings
2. developing the video processings that correspond to the
analysis features
3. carrying out experiments that lead to find out the best
setting
4. writing scientific papers that detail this work
Evaluation Criterion
The criterion for camera setting evaluation are:
video acquisition hardware cost (in €)
video acquisition software cost (in lines-of-code)
video acquisition system performance (in seconds)
analysis feature software processing cost (in lines-of-
code)
analysis feature processing performance (in seconds)
analysis feature processing accuracy (in Precision,
Recall and F-Measure)
Camera Settings
The targeted camera settings are:
1 camera with motion tracking
2 cameras with image selection
2-as-1 cameras with image merging
Analysis Features
The targeted analysis feature are:
court detection: detect the basketball court in an image
player detection: detect the players in an imageplayer tracking: track the players through successive
images
team detection: gather players into teams in an image
play detection: cut a video sequence into subsequences
that correspond to actions
play classification: predict the type of play for each
player in a video sequence
Technologies
The targeted technologies are:
OpenCV for both Computer Vision and Deep Learning
(https://opencv.org/)
Java as programming language
Roadmap
Tasks
1. State-of-the-Art
reading the different articles about machine-learning
based sport analysis
1. Reading
collecting and analysing articles
2. Writing
summing up all readings
2. Dataset
building a dataset of youth basketball videos
1. Initial
building a first dataset for prototyping the
analysis components
2. Intermediate
building a common dataset with the different video
acquisition systems3. Final
releasing publicly the dataset that will support
the experiments
3. Cameras
developing video acquisition systems with camera
settings
1. 1 camera system with motion detection processing
2. 2 cameras with image selection processing
3. 2-as-1 cameras with image merging processing
4. Analysis
developing video processing components for the analysis
features
Milestones
References
1. Colby T. Jeffries. “Sports Analytics With Computer
Vision”. Senior Independent Study Theses. Paper 8103,
2018.
2. Graham Thomas, Rikke Gade, Thomas Moeslund, Peter Car,
Adrian Hilton. “Computer Vision for Sports: Current
Applications and Research Topics”. Computer Vision and
Image Understanding. 159. 2017.
3. Wei-Lwun. Lu, Jo-Anne Ting, James J. Little and Kevin.
P. Murphy, “Learning to Track and Identify Players from
Broadcast Sports Videos,” in IEEE Transactions on
Pattern Analysis and Machine Intelligence, vol. 35, no.
7, pp. 1704-1716, July 2013.
4. Adrià Arbués-Sangüesa, Coloma Ballester, Gloria Haro.
“Single-Camera Basketball Tracker through Pose and
Semantic Feature Fusion”. 2019.
5. Francia, Simone, Simone Calderara, Dott Fabio Lanzi.
“Classificazione di Azioni Cestistiche mediante Tecnichedi Deep Learning.” 2018.
6. Arda Senocak, Tae-Hyun Oh, Junsik Kim and In So Kweon,
“Part-Based Player Identification Using Deep
Convolutional Representation and Multi-scale Pooling,”
2018 IEEE/CVF Conference on Computer Vision and Pattern
Recognition Workshops. pp. 1813-18137, 2018.
7. Evan Cheshire, Cibele Halasz, Jose Krause Perin. “Player
Tracking and Analysis of Basketball Plays”
8. Pei-Chih Wen, Wei-Chih Cheng, Yu-Shuen Wang, Hung-Kuo
Chu, Nick C. Tang, and Hong-Yuan Mark Liao. “Court
Reconstruction for Camera Calibration in Broadcast
Basketball Videos,” in IEEE Transactions on
Visualization and Computer Graphics, vol. 22, no. 5, pp.
1517-1526, 2016.
9. P. K. Santhosh, B. Kaarthick. “An Automated Player
Detection and Tracking in Basketball Game”. Materials &
Continua. 58. pp. 625-639. 2019.
10. Chen, Jianhui, Fangrui Zhu, and James J. Little. “A two-
point method for PTZ camera calibration in sports.” 2018
IEEE Winter Conference on Applications of Computer
Vision. IEEE, 2018.
11. Vignesh Ramanathan , Jonathan Huang , Sami Abu-El-Haija
, Alexander Gorban, Kevin Murphy , and Li Fei-Fei.
“Detecting Events and Key Actors in Multi-person
Videos,” 2016 IEEE Conference on Computer Vision and
Pattern Recognition, pp. 3043-3053, 2016.
12. Joseph Redmon, Santosh Divvala, Ross Girshick, Ali
Farhadi. “You Only Look Once: Unified, Real-Time Object
Detection”. in Proceedings of the IEEE Conference on
Computer Vision and Pattern Recognition (pp. 779-788).
2016.Simulateur 3D pour la
robotique autonome et
connectée
Contexte et objectif du projet
L’équipe INCASE (GE-MIA) travaille sur plusieurs thématiques
autour de l’Industrie du Futur dont la robotique autonome et
connectée. On entend ici par robot autonome et connecté toute
entité instrumentée et dotée d’un système de contrôle
embarqué. De plus, elle est capable de communiquer et
d’interagir en temps réel et à distance avec son environnement
ou avec d’autres entités à distance.
Nous disposons au département GE-MIA de quelques robots
mobiles pour la recherche et la pédagogie. Mais ils sont
limités en nombre et en capacités.
L’objectif de ce travail, à terme, est de mettre au point un
simulateur opérationnel pour construire des maquettes
numériques sur mesure et contrôlables en ligne. L’accent sera
mis en premier lieu sur:
des modèles de robot avec son environnement de travail
(bras manipulateur mobile ou fixe)
véhicule de type voiture autonome intégrant une
instrumentation de type ADAS[1]
Les applications immédiates attendues de cet outil sont:
usage en Recherche: disposer d’une plateforme de
validation d’algorithme de contrôle/commande avancée
(robotique mobile et véhicules autonomes notamment) +
actions de communication et de collaboration autour de
ce thème.
usage en R&D: outil d’étude de faisabilité et
prototypage rapideusage pédagogique: mise à la disposition des élèves
I4.7/8 et A4.8 pour les projets de synthèse
Architecture du simulateur
Le simulateur sera développé autour des plateformes
logicielles suivantes:
Matlab/Simulink pour l’implémentation des algorithmes de
contrôle/commande temps réel
V-REP : pour la création et simulation numériques de
maquettes virtuelles ( partie opérative)
SOLIDWORKS, pour le design de partie opérative 3D
spécifique (le cas échéant)
L’image illustre l’architecture de principe du système à
réaliser. Les parties logicielles “Interface” (Matlab) et “3D
Simulation” (V-REP) peuvent cohabiter dans le même PC hôte ou
tourner dans 2 PCs connectés par réseau Ethernet (TCP/IP). La
partie HIL (Hardware In the Loop) sera étudiée par la suite.
Le travail demandé consiste à:
Faire un état de l’art sur la simulation virtuelle 3D
(native Matlab ou par logiciel compatible).
S’approprier les fonctionnalités de Matlab/Simulink: le
langage script Matlab et la toolbox de programmation
graphique Simulink. De même que la toolbox ROS (Robotic
Operating System)
S’approprier l’environnement V-REP: programmation et
création d’objet 3D
En s’appuyant sur la littérature existante, réaliser une
interface entre V-REP et Matlab/Simulink selon les deux
technologies suivantes:
utilisant le mode script Matlab
utilisant les fonctions ROS sous Simulink
Réaliser un premier prototype du simulateur 3D ens’appuyant sur le modèle du robot Kuka YouBot (dont on
dispose d’un exemplaire à l’Icam)
Réaliser un deuxième prototype d’un simulateur 3D avec
comme partie opérative 2 véhicules à 4 roues (partant de
modèles existant dans la littérature)
Réaliser des tutoriels sur les développements réalisés
Rédiger un rapport technique + une note de synthèse du
travail réalisé
Par ailleurs, dans le cadre de ce travail, le binôme MSI sera
appelé à déployer cette technologie et la mettre en oeuvre en
encadrant des groupes d’élèves I4 ou/et A4 dans le cadre de
leur projet de synthèse.
[1] ADAS: Advanced Driver Assistance System
Topologie des mailles LoRa
pour la radio de faible
puissance
Contexte :
Pour la chaîne d’approvisionnement automobile, des rouleaux
sont utilisés pour transporter des matériaux et des
équipements vers diverses usines réparties en Europe. Mais les
rouleaux peuvent être perdus, ce qui peut entraîner une baisse
de l’argent et participer à une certaine forme de pollution.
Les rouleaux peuvent également être livrés à de mauvais
fabricants, ce qui entraîne des pertes de temps, la
réexpédition des marchandises et l’absence de garantie de
livraison. Des centaines de milliers de boîtes IdO peuvent
être distribuées dans le monde entier et la durée de vie despiles doit être de 10 à 20 ans. Dans ce contexte, nous voulons développer un nouveau planificateur de messages RF conscient de l’énergie, pour le système d’exploitation en temps réel appelé Trampoline [1], capable de réduire la consommation d’énergie des objets IdO lorsque L’autonomie est cruciale pour éviter le remplacement des batteries. Dans ce projet, nous sommes intéressés par l’exploration des mémoires F-RAM non volatiles avec un calcul normalement éteint (en sommeil la plupart du temps), l’amélioration du protocole LoRa pour soutenir l’approche Wake-up-radio [2] et la topologie Mesh [3]. Ainsi, le but principal de l’étude est de dériver un modèle de vibrations pour détecter correctement le stockage des rouleaux, d’écrire un pilote LoRa amélioré pour MSP430, d’implémenter une carte Wake-Up-Radio existante et de construire un prototype basé sur la surveillance des vibrations (IMU) pour réveiller les radios voisines sur une topologie Mesh. Le travail consistera à comparer la robustesse pour détecter les mouvements de roulis et les arrêts et à expérimenter la radio de réveil LoRa pour prolonger la durée de vie des piles et réduire la consommation d’énergie. [1] Béchennec, Jean-Luc & Briday, Mikaël & Faucou, Sebastien & Trinquet, Yvon. (2006). Trampoline an opensource implementation of the OSEK/VDX RTOS specification. IEEE International Conference on Emerging Technologies and Factory Automation, ETFA. 62 – 69. 10.1109/ETFA.2006.355432. [2] Magno, Michele & Jelicic, Vana & Srbinovski, Bruno & Bilas, Vedran & Popovici, Emanuel & Benini, Luca. (2016). Design, implementation and performance evaluation of a flexible, low latency and low cost nano-Watt Wake-Up Radio Receiver. IEEE Transactions on Industrial Informatics. 12. 1-1.10.1109/TII.2016.2524982. [3] Rtones – https://rtone.fr/bluetooth-mesh/, « Bluetooth® mesh networking, An Introduction for Developers », Martin
Woolley, Sarah Schmidt, Bluetooth SIG. Réalisation d’un Démonstrateur utilisant la robotique mobile pour la reconnaissance automatique des objets dans un entrepôt intelligent avec OpenCV sous Python Contexte : Dans le cadre du projet de recherche INTERREG, l’école d’ingénieurs Icam, en collaboration avec d’autres partenaires universitaires (Isen, Université de Lille1, CITC, Université de Gent, Université de Kent, Université d’Essex ,.) a réalisé plusieurs travaux de recherche autour de l’industrie 4.0. Pour plus de détails voir le lien : www.incase2seas.eu. Afin de continuer à améliorer ce projet, il serait intéressant de développer un système utilisant un robot mobile de type TurtleBot pour la détection et la reconnaissance automatique des objets tagués (RFID, Qrcode, ..) dans un entrepôt intelligent avec OpenCV sous Python. Description du projet : Il s’agit dans ce MSR d’étudier, d’explorer et de concevoir un démonstrateur « Plate forme » utilisant des robots mobiles de type TurtleBot sous ROS (Robot Operating System) pour la
détection et la
reconnaissance automatique des objets tagués (RFID, Qrcode,
..) dans un entrepôt intelligent OpenCV sous Python.
Ce démonstrateur servira principalement à préparer le travail
pour le projet de recherche qui sera entrepris avec
l’université de ATENEO (Philippines).
Les outils et matériels utilisés pour ce projet sont :
ROS : Robotic Operating System
OPENCV
Machine Learning (langage : Python, C ++ or JAVA)
les Robots : Youbot, TURTLEBOT2i, Burger, sous Ubuntu
Camera Xtion Pro
Scanner pour évitement d’obstacles
Livrables attendus :
Délivrable 1 :
Documents de l’état de l’art sur la robotique mobile
sous ROS et sur la vision avec OpenCv sous Python.
Documents techniques illustrant des exemples, tutoriaux
et des exercices sur des cas concrets de la robotique
mobile sous ROS et de la vision avec OpenCV
Démonstrateur n° 1 : Détection d’objets et de formes
graphiques selon des critères comme la couleur ou la
forme graphique.
Délivrable 2 :
Documents de l’art sur les techniques de machine
Learning sous Python. Il s’agit ici d’étudier les
différentes techniques algorithmiques qui existantent et
utilisées en Machine Learning pour résoudre des
problèmes d’apprentissage automatique.
Documents et tutoriaux permettant d’expliquer les
différentes packages à installer pour traiter les
problèmes liés à l’apprentissage automatique : Machine
Learning.Démonstrateur n °2 : Prototype de détection automatique
et de récupération d’objets utilisant OpenCV à l’aide
d’un robot mobile sous ROS et Python: Vision, Robotique
Mobile et Apprentissage Automatique
Comparaison de la résistance
à la corrosion entre les
alliages élaborés avec la
fabrication d’additifs
métalliques et la métallurgie
classique
Contexte :
Depuis de nombreuses années, les matériaux métalliques sont
fabriqués par des procédés métallurgiques classiques. Les
propriétés des alliages ainsi fabriqués ont été testées à de
nombreuses reprises et sont aujourd’hui souvent bien connues.
Depuis quelques temps, de nouveaux procédés industriels
permettent de développer des matériaux métalliques. Il s’agit
de procédés utilisant la fabrication par couches additives,
comme la fabrication par fusion de lit de poudre au laser, la
fabrication par faisceaux d’électrons.
Ces nouveaux procédés d’élaboration ont plusieurs avantages
comme la possibilité d’obtenir des pièces métalliques presque
finies, la fabrication possible de formes complexes, mais il y
a aussi des inconvénients, comme le temps de fabrication, la
mise en évidence des défauts (comme la partie non fondante dela poudre, la porosité, le mélange non homogène de deux couches de fusion successives, la rugosité,…). Aujourd’hui, de nombreux travaux de recherche portent sur les moyens de diminuer la quantité de ces défauts de surface directement au cours du processus. D’autres travaux de recherche actuels présentent des caractérisations des contraintes résiduelles, des propriétés mécaniques, … Mais il n’y a que peu de résultats concernant la résistance à la corrosion de ces échantillons. Objectif de l’étude : Les pièces fabriquées par ALM présentent une surface avec quelques imperfections ou défauts. Il serait intéressant de connaître l’effet de ces défauts sur les propriétés de corrosion de ces pièces. Une comparaison serait faite avec des échantillons fabriqués avec un usinage classique de fabrication et de préparation de surface. Programme de travail : Ces procédés ALM relativement nouveaux et l’impact de ce type de fabrication sur les propriétés de surface comme la résistance à la corrosion doivent être documentés par une revue de la littérature. Les alliages testés seraient des alliages à base d’aluminium (Al-Cu, Al-Zn) et des alliages à base de titane (TiAlV). Avant les tests de corrosion, les échantillons doivent être observés au microscope optique et au MEB afin de visualiser le type de défauts présents et de les quantifier. Des tests tels que des mesures de rugosité et autres caractérisations de surface (microdureté,..) doivent être effectués. En ce qui concerne la résistance à la corrosion comparative entre les échantillons ALM et les échantillons de métallurgie classique, les expériences doivent être réalisées en mode stationnaire et en mode non stationnaire. L’électrolyte sera
Vous pouvez aussi lire