ROBO-PONG STI2D DOSSIER DE PRÉSENTATION - ROBOT D'ENTRAINEMENT AU PING-PONG
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
ROBO-PONG®
ROBOT D’ENTRAINEMENT AU PING-PONG
STI2D
DOSSIER DE PRÉSENTATION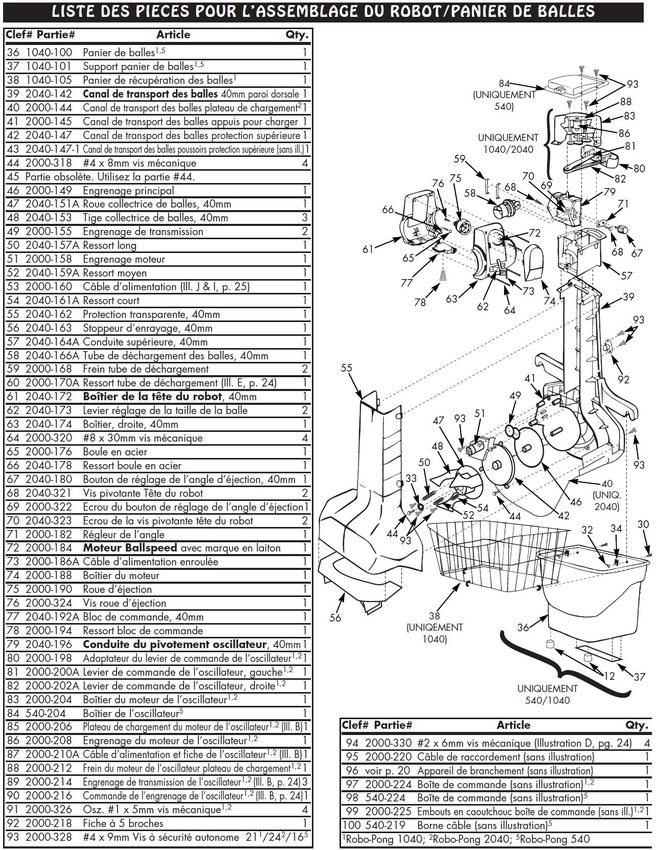
STI2D ROBO-PONG®
ROBO-PONG®
Robot d’entrainement au ping-pong
1. LE PING-PONG
1.1. Présentation
Le tennis de table (ou « ping-pong » dans le langage courant)
est un sport de raquette opposant deux ou quatre joueurs
autour d'une table. Le tennis de table est une activité de loisir
mais aussi un sport olympique depuis 1988. Le terme « ping-
pong » est plutôt utilisé pour désigner le jeu de loisirs, alors que
le terme « tennis de table » est plutôt utilisé pour désigner la
pratique sportive ; malgré tout, un pratiquant de ce sport, y
compris en compétition, s'appelle toujours un « pongiste ».
L'histoire de ce sport est marquée par une série d'évolutions
techniques (nature des revêtements de raquettes, introduction puis interdiction d'usage de la colle
rapide) qui ont conduit à des innovations dans le style de jeu (utilisation de la « prise porte plume »
par les hongrois puis les asiatiques) et dans les tactiques employées au plus haut niveau comme
l'apparition du topspin à la fin des années 1970. Le tennis de table moderne permet une grande
variété de systèmes de jeu, avec les jeux d'attaque, de contre-initiative et les jeux de défense
particulièrement spectaculaires.
Le nombre de pratiquants dans le monde est estimé à plus de 260,5 millions, et la Fédération
internationale de tennis de table (ITTF) regroupe plus de 200 nations et 33 millions de licenciés qui se
rencontrent à tous les niveaux de compétition, du tournoi de club jusqu'aux championnats du monde
en passant par le Pro tour, un ensemble de tournois organisés par l'ITTF se déroulant sur tous les
continents et qui concrétise une professionnalisation au plus haut niveau.
Le tennis de table trouve ses origines dans l'Angleterre de la fin du XIXe siècle. L'histoire la plus
répandue sur la création du tennis de table est qu'au cours d'un dîner, des notables de la société
victorienne discutant de tennis ont voulu montrer quelques schémas de jeu sur la table. Ils se sont
alors servis d'un bouchon de champagne en guise de balle, des boîtes de cigare pour les raquettes et
des livres pour le filet.
1.2. Règles de base
On joue sur une table séparée au milieu par
un filet haut de 15,25 cm, écarté d'autant à
l'extérieur du bord de la table. Chaque joueur
est équipé d'une raquette. Le but est de renvoyer
la balle avec cette raquette sur la moitié de table
adverse. Un point est gagné par le joueur chaque
fois que son adversaire ne renvoie pas la balle,
laisse rebondir la balle plus d'une fois sur sa
demi-table, ou empêche la balle renvoyée par le joueur de rebondir sur sa propre demi-table
(obstruction). Dans le cas où la balle est rattrapée en dehors de la table alors qu'elle n'avait pas
touché celle-ci, le point est perdu par le joueur qui vient de jouer la balle. Un point est gagné aussi
lorsque l'adversaire renvoie la balle qui touche un obstacle avant de toucher la demi-table adverse
Dossier de présentation Page 2 / 27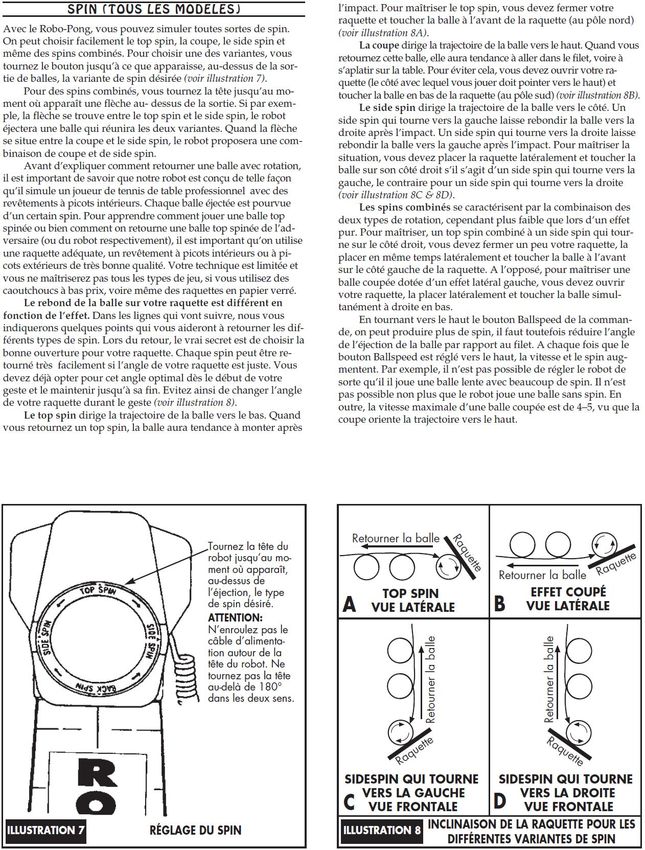
STI2D ROBO-PONG®
(sauf les poteaux du filet), ou touche la balle autrement qu'avec la raquette ou la main qui tient la
raquette.
Autres cas plus rares qui donnent le point au joueur : la balle touche plus d'une fois la raquette de
son adversaire, l'adversaire touche la surface de la table avec la main qui ne tient pas la raquette,
l'adversaire fait bouger la table pendant le point, l'adversaire touche le filet, la balle est remise avec
une raquette que l'adversaire ne tenait plus en main, l'arbitre juge que le service n'est pas régulier
(masqué par exemple), l'arbitre, après avoir déjà averti le serveur, est à nouveau gêné pour s'assurer
de la validité du service, ou encore le joueur effectue un retour grâce à toute autre chose que la
raquette.
Une manche, on dit aussi fautivement un « set », est gagnée par le premier joueur qui atteint 11
points s'il a au moins 2 points d'avance sur son adversaire. S'il n'a qu'un point d'avance, la partie
continue ; elle est gagnée par le premier qui obtient 2 points d'écart avec son adversaire.
Le premier serveur est déterminé par tirage au sort. Les adversaires font ensuite deux services
chacun sauf si les joueurs ont chacun plus de 10 points, auquel cas le service change à chaque point.
Le premier serveur change à chaque manche.
1.3. Le matériel du joueur
1.3.1. La balle
C'est une sphère en celluloïd, ou autre matière plastique aux
propriétés voisines, de couleur orange ou blanche en compétition, elle
pèse 2,7 g et a un diamètre de 40 mm (avant 2000, le diamètre de la
balle était de 38 mm). La balle doit respecter certaines conditions de
rebond : lâchée de 30 cm au-dessus de la table, elle doit rebondir d'au 38mm 40mm
moins 23 cm.
Lors des compétitions officielles, les joueurs jouent avec des balles de catégorie « trois étoiles ».
Ces balles sont de meilleures qualités, c'est-à-dire plus rondes et plus dures, elles sont également plus
fragiles et plus chères que les balles ordinaires. Pour le loisir ou les séances d'entraînement, les
joueurs utilisent des balles beaucoup moins chères, codifiées 2 étoiles, 1 étoile ou sans étoile.
1.3.2. La raquette
La forme de la raquette, sa dimension et son poids ne sont
pas réglementés, seule l'épaisseur des revêtements est
limitée à quatre millimètres.
Le corps de la raquette, appelé « bois », doit être plat
et rigide. Au moins 85 % de son épaisseur totale doit être
en bois naturel. Les faces utilisées pour frapper la balle
doivent être recouvertes d'un revêtement en caoutchouc d'un seul tenant,
d'épaisseur et de couleur uniforme, une des faces est obligatoirement rouge
vif, et l'autre noire. Entre le revêtement et le bois, il est fréquent d'avoir une
épaisseur de mousse synthétique. Les fédérations publient chaque année une
liste des revêtements autorisés.
Dossier de présentation Page 3 / 27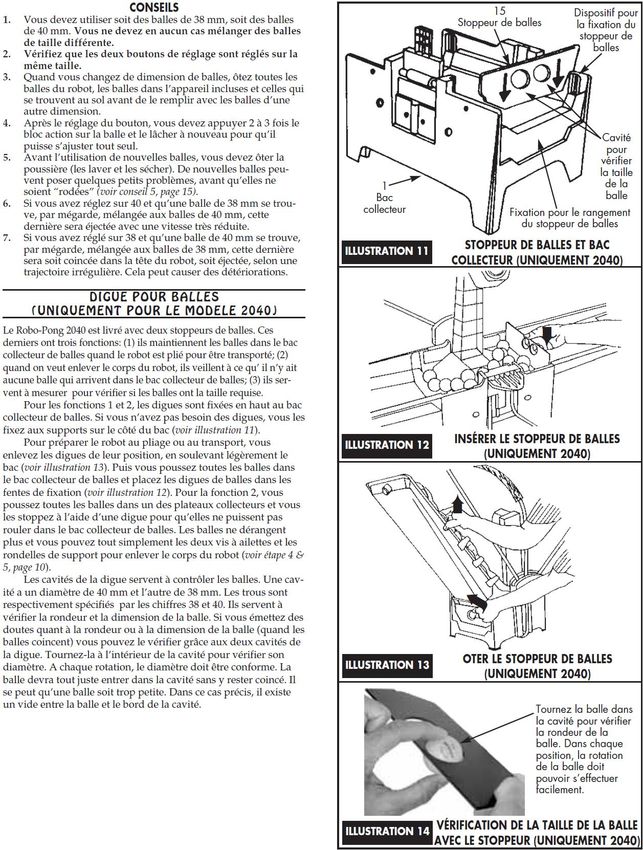
STI2D ROBO-PONG®
1.4. Les effets de balle
1.4.1. Coupé
Une balle coupée est frappée en mettant la
raquette quasiment à l'horizontale et en passant en
dessous de la balle. La raquette part du haut et
s'avance vers le bas et en avant. Le coupé peut se
faire soit :
au-dessus de la table : on parle alors de
« poussette ». Ce coup n'est en général possible
qu'en début de point, quand la balle n'a pas
encore acquis trop de puissance ;
loin de la table : on parle alors d'un coup d'attente ou de défense, car il a pour effet de ralentir la
balle, permettant à son auteur de se replacer correctement ou de préparer son prochain coup.
1.4.2. Topspin
Variante apparue avec les raquettes à
revêtement synthétique à picots (plus adhérent
que les revêtements lisses), le topspin consiste à
« frotter » la balle de bas en haut de manière à
imprimer à la balle une rotation d'arrière en avant,
c'est-à-dire que le contact entre la raquette et la
balle soit le plus long possible grâce à un ample
mouvement de « brosse » appelé aussi « effet
Magnus ». Un bon topspin est un compromis entre frotter la balle le plus finement possible et une
accélération au moment de l'impact. Si la raquette possède un revêtement adhérent, la balle va
tournoyer en prenant une trajectoire parabolique : après être montée, elle va plonger très
rapidement et accélérer en touchant la table, ce qui est déstabilisant pour l'adversaire. Pour renvoyer
la balle sur la table, celui-ci est obligé de « fermer » l'angle de sa raquette (ce qu'on appelle « faire un
bloc »), sinon la balle repart en montant encore plus (à cause de l'effet lifté) et sort. Un échange de
balle en topspin amène la balle à une vitesse approchant les 200 km/h.
1.4.3. Side spin
Alternative au topspin, le side spin permet de donner un effet latéral à la balle en plus du lift. Il
s'effectue presque comme un coup classique mais la raquette doit frotter la balle sur le côté, de
l'arrière vers l'avant. Cette technique est difficile à réaliser mais si l'adversaire n'est pas attentif, il
peut facilement se faire surprendre car, au lieu de monter, la balle part sur le côté. On effectue
généralement le side spin (ou « topspin latéral ») en coup droit. Ce coup est souvent une technique
appréciée des gauchers, car leur side spin arrive sur le revers adverse, avec de l'effet latéral qui force
l'adversaire à se déplacer.
Dossier de présentation Page 4 / 27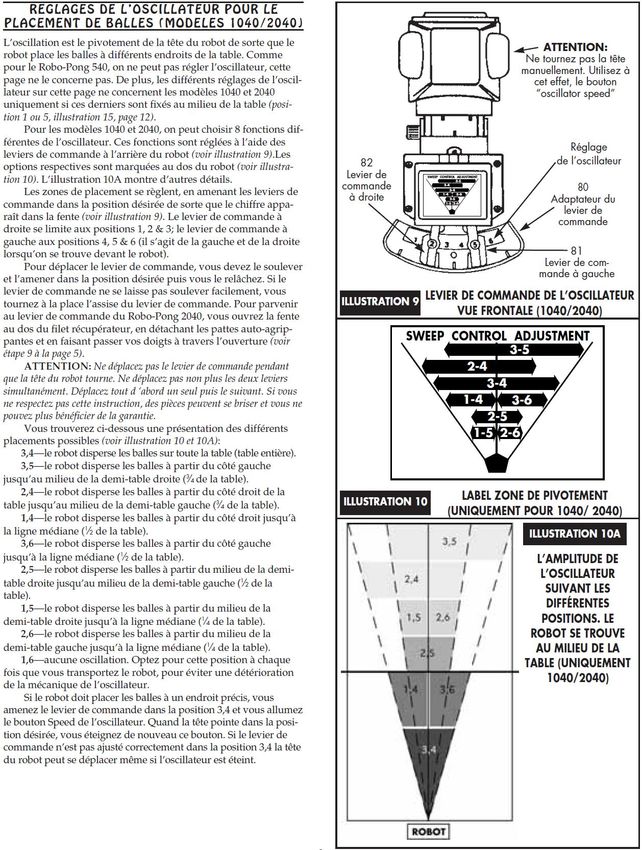
STI2D ROBO-PONG®
1.5. Techniques d’entraînement
Il y a plusieurs types d'entraînement. Une première
méthode est l'entraînement individuel, avec des paniers de
balles et un robot ou avec un entraîneur. Une autre technique
plus classique pour s'entraîner est l'entraînement avec un
partenaire pour travailler les schémas de jeu.
L'intérêt de l'entraînement est d'acquérir une bonne
technique de frappe (bonne position du corps et de la
raquette) adaptée au résultat recherché (attaque, défense,
etc.) et utilisable quasiment sans réflexion (acquisition
d'automatismes). Les automatismes, indispensables pour un jeu où la
balle atteint des vitesses difficiles à suivre pour l'œil, s'acquièrent à
l'entraînement grâce à la répétition d'un même geste, l'entraîneur
étant là pour montrer la bonne position du corps et de la raquette.
Cependant un des points essentiels d'un entraînement efficace est
de varier les situations et les partenaires d'entraînement, car la
répétitivité de certains enchaînements peut conduire à un manque d'adaptation à des situations
nouvelles ; d'autre part la répétitivité limite le développement des habiletés motrices, et peut nuire
également à la motivation des joueurs.
1.6. Ping-pong et informatique
Sur un réseau informatique, le « ping » est une commande qui envoie un message à un serveur
pour savoir si l'ordinateur qui a envoyé le message est bien reconnu par ce serveur.
Le ping-pong a inspiré le premier jeu vidéo à succès, Pong, jeu de tennis de table virtuel.
Dossier de présentation Page 5 / 27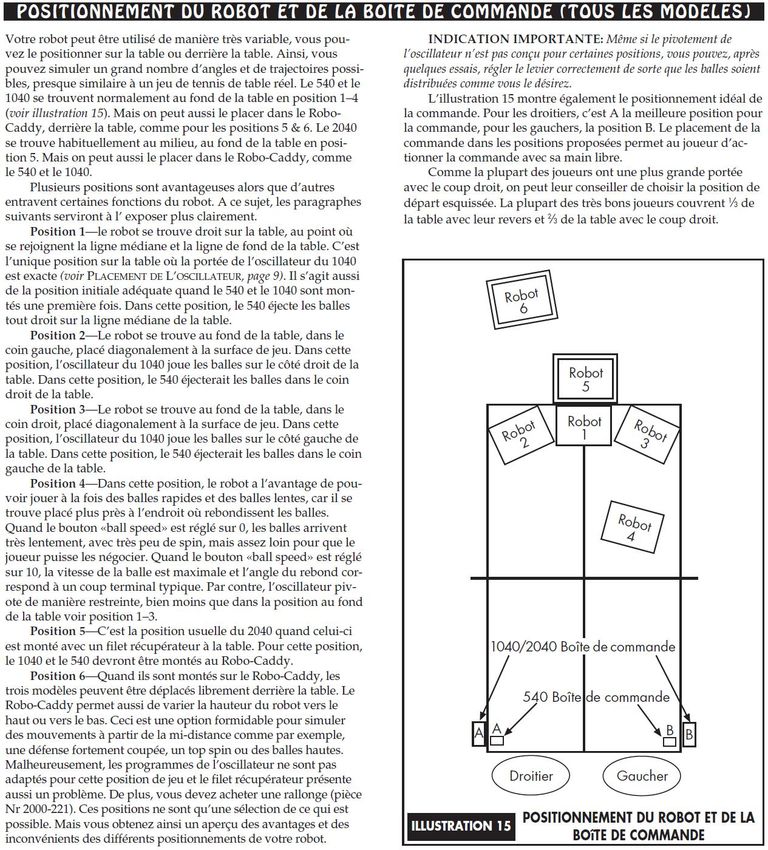
STI2D ROBO-PONG®
2. PRÉSENTATION DES ROBOTS D’ENTRAÎNEMENT
2.1. Bilan des robots existants sur le marché
Paramétrage
Marque
Cadence Vitesse Oscillation Description technique
Variante automatique de coups
TTmatic® Appareil à roulettes à maintenir au sol
Conçu pour balles de 38mm et 40mm même
mélangées
Boîtier de contrôle télécommandé
Changement automatique des balles courtes aux
balles longues, Topspin, Balles coupées
Maximum de la suite des balles: env. 100 balles
par minute
Filet de récupération avec réservoir sous la table
(env. 100 balles)
Joola®
Variante automatique de coups
Appareil à roulettes à maintenir au sol
Changement automatique des balles courtes aux
balles longues, Topspin, Balles coupées
Programme marche/arrêt pour la cadence
Maximum de la suite des balles: env. 100 balles
par minute
Filet de récupération avec réservoir sous la table
(env. 100 balles)
Tibar® Fonction « aléatoire » pour servir des balles
courtes ou longues
Changement automatique des balles courtes aux
balles longues, Topspin, Balles coupées
Programmation d'exercices avec succession de
balles allant jusqu'à 999 balles et 11 différents
positionnements sur la table
De 30 à 85 balles par minute
Boîtier de contrôle télécommandé
Filet de récupération avec réservoir
Donic®
Gamme économique et évolutive
Tous les modèles sont compatibles et évolutifs
Positionnement aléatoire de la balle (1)
Filet de récupération avec réservoir (env. 100
balles) (1)
(1)
Panier complémentaire (env. 200 balles) (1)
Cibles d’entrainement avec comptage des
points (1)
Réglage manuel des effets
(1) fonction du modèle
Dossier de présentation Page 6 / 27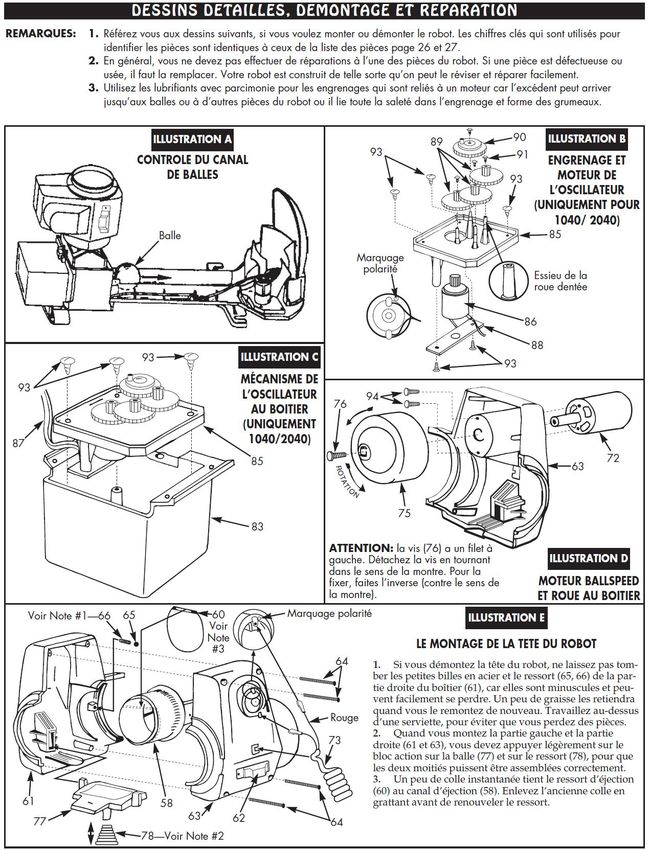
STI2D ROBO-PONG®
2.2. Gamme évolutive DONIC®
L’étude porte sur la gamme évolutive DONIC®. Cette gamme est également commercialisée sous le
nom Newgy au États-Unis. Le principal avantage de cette gamme est qu’elle est évolutive.
2.2.1. Modèle de base Robo-Pong® 540
Modèle initial pour les premiers pas à l'entraînement au robot.
Réglage électronique de la vitesse et de la cadence des balles.
Réglage manuel du spin
Réglage manuel de la position des balles.
Prix public : 249€
2.2.2. Modèle Robo-Pong® 1040
+
Évolution du modèle 540
Réglage électronique de l’oscillation de la tête
Commande plus puissante
Vitesse plus élevée
Prix public : 389€
2.2.3. Modèle Robo-Pong® 2040
+
Évolution du modèle 1040
Récupération des balles
Prix public : 615€
Dossier de présentation Page 7 / 27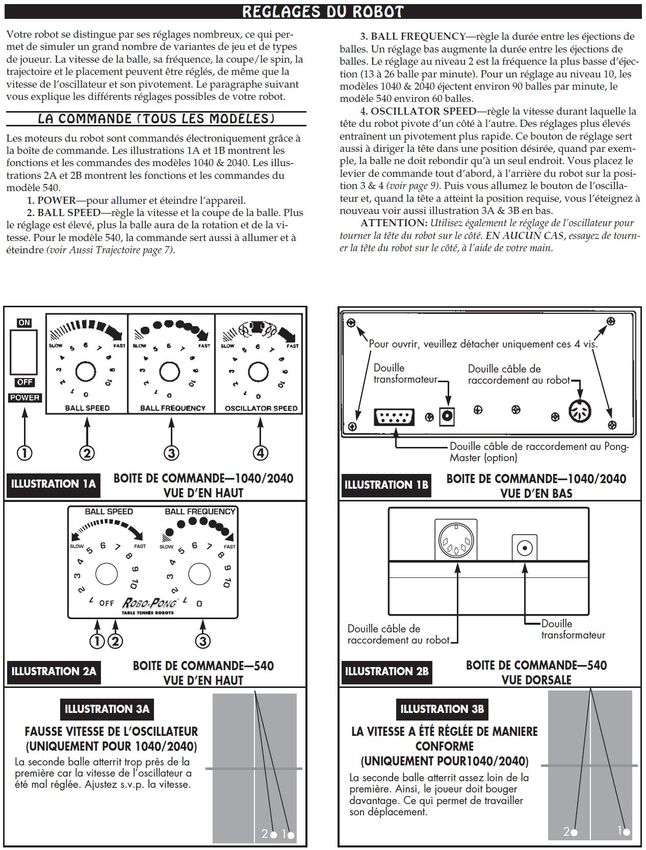
STI2D ROBO-PONG®
2.2.4. Option capteurs de table « Newgy PONG-MASTER »
Cibles d’entrainement pour modèle à partir du 1040
Comptage et affichage des points
Prix public : 189€
2.2.5. Option commande numérique
Commande numérique
Affichage LCD des réglages
Prix public : 259€
Dossier de présentation Page 8 / 27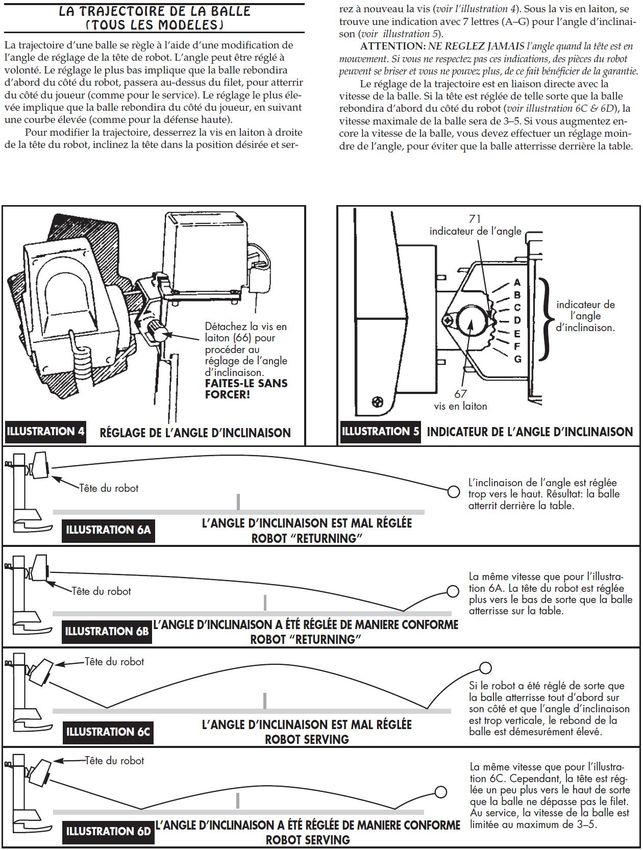
STI2D ROBO-PONG®
3. PRÉSENTATION DU SYSTÊME COMMERCIALISÉ
3.1. Diagramme d’exigences (Requirement)
req Robo-Pong
« Requirement »
Entrainer au Ping-pong
Id = « 001 »
Text = « Le robot doit permettre au joueur de
suivre un programme d’entrainement adapté à
son niveau »
« Requirement » « Requirement » « Requirement »
Distribuer les balles S’adapter à la source d’énergie Contenir les balles
Id = « 002 » Id = « 003 » Id = « 004 »
Text = « On doit pouvoir Text = « Les robots doivent pouvoir Text = « Le Robot doit pouvoir
adapter les paramètres être alimentés avec : contenir 90 balles (version 540)
suivants : - Un adaptateur 230VAC/12VDC » extensible à 200 balles (version
- Vitesse d’éjection des balles 1040). Il peut être équipé d’un
- Cadence d’éjection filet de récupération de balles
- Effets de balles en option. Cet équipement est
- Vitesse d’oscillation de la tête livré de base dans la version
(version 1040) » 2040
Les balles sont de 40mm de
diamètre »
« Requirement »
Faciliter la configuration
Id = « 005 »
Text = « Les paramètres de
jeux doivent être
configurables :
- Sur la tête du robot pour les
effets de balles
- Sur le pupitre du robot pour
les autres paramètres »
Dossier de présentation Page 9 / 27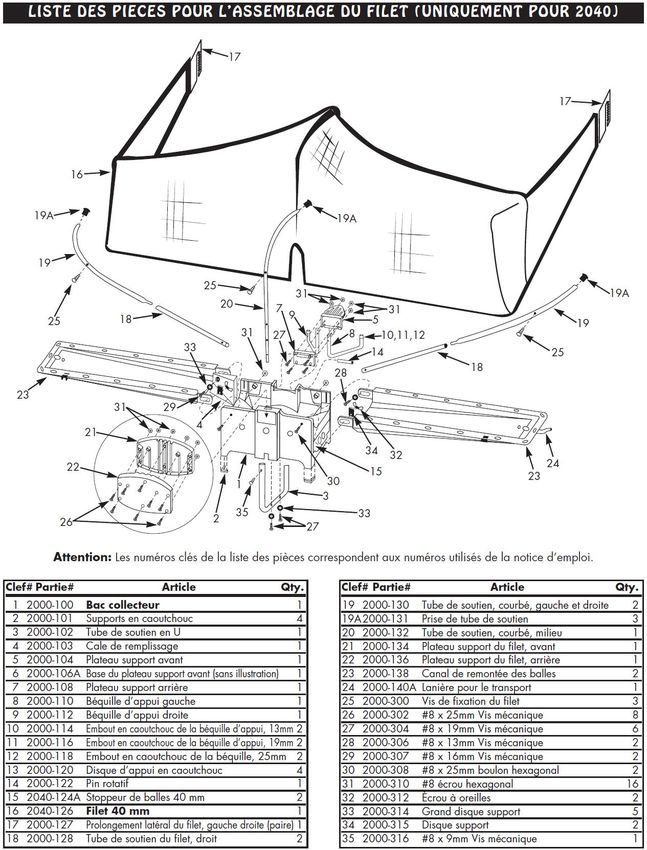
STI2D ROBO-PONG® 3.2. Diagramme de cas d’utilisation Dossier de présentation Page 10 / 27
STI2D ROBO-PONG®
3.3. Diagramme de séquence (Sequence Diagram black box)
sd black box
Joueur Pupitre Robot
1 : Alimentation en balles
2 : info visuelle bac de balle plein
3 : Connexion secteur
4 : Réglage vitesse
5 : Réglage cadence
6 : Réglage oscillation
7 : Réglage de la tête : longueur de balle et effets
8 : Mise en marche 9 : Commande moteurs
10 : Voyant allumé
11 : Info visuelle et sonore Moteurs en marche
12 : Séance
d’entrainement
13 : Retour de balle
14 : Arrêt 15 : Mise hors tension des moteurs
16 : Voyant éteint
Dossier de présentation Page 11 / 27STI2D ROBO-PONG®
3.4. Diagramme de définitions de blocs (Block Definition Diagram)
Ddb système dans son environnement
« System Context »
Contexte du système
d’entrainement au ping-pong
1..
Joueur
Entraineur
« External »
Gymnase
« System »
Robo-Pong
« Value »
largeur = 330mm
« External » « External » « External » hauteur = 510mm
Table de ping-pong Source d’énergie Connexion réseau profondeur = 230mm
poids 540= 2,5kg
poids 1040= 3,8kg
« Value » « Value » « Value » couleur = noir
Énergie électrique : RJ45 = rarement capacité = 100 à 200 balles
Table : rares prises 230V Wifi = rarement moteurs 540 = 2 MCC cde MLI
Couleur = verte ou Énergie lumineuse : moteurs 1040 = 3 MCC cde MLI
bleu Néons + Projecteur Cadence min. 540 = 13 min-1
Tracé = blanc émettant également Cadence min. 1040 = 26 min-1
Longueur =274 cm dans les infrarouges Cadence max. 540 = 63 min-1
Largeur = 152,5 cm Cadence max. 1040 = 94 min -1
Hauteur = 76 cm Vitesse min. 540 =STI2D ROBO-PONG®
3.5. Diagramme de blocs internes (Internal Block Diagram)
Ibd entre acteurs et système
Table
Action
mécanique
M/A
Joueur Alimentation en
balles
Robo-Pong :
Retour de Robot d’entrainement
balles au ping-pong
Paramétrage
Entraineur
Énergie
électrique
Secteur
ERDF
3.6. Diagramme de blocs internes (Internal Block Diagram)
La deuxième forme du diagramme de blocs internes est développé dans la partie suivante : « évolution du
Robo-Pong »
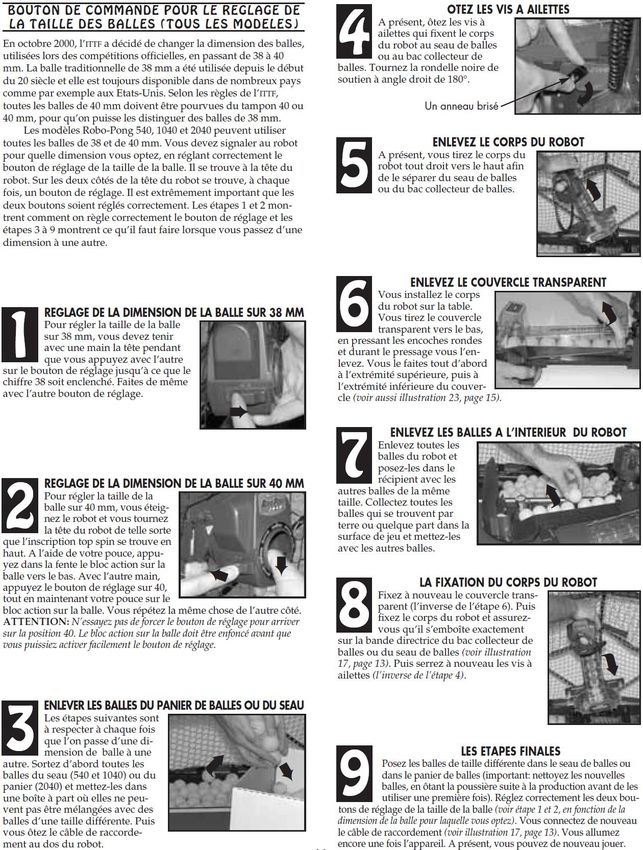
Dossier de présentation Page 13 / 27STI2D ROBO-PONG® 3.7. Notice d’utilisation des robots Newgy® (extrait) Dossier de présentation Page 14 / 27
STI2D ROBO-PONG® Dossier de présentation Page 15 / 27
STI2D ROBO-PONG® Dossier de présentation Page 16 / 27
STI2D ROBO-PONG® Dossier de présentation Page 17 / 27
STI2D ROBO-PONG® Dossier de présentation Page 18 / 27
STI2D ROBO-PONG® Dossier de présentation Page 19 / 27
STI2D ROBO-PONG® Dossier de présentation Page 20 / 27
STI2D ROBO-PONG® Dossier de présentation Page 21 / 27
STI2D ROBO-PONG® Dossier de présentation Page 22 / 27
STI2D ROBO-PONG® Dossier de présentation Page 23 / 27
STI2D ROBO-PONG® Dossier de présentation Page 24 / 27
STI2D ROBO-PONG® Dossier de présentation Page 25 / 27
STI2D ROBO-PONG® Dossier de présentation Page 26 / 27
STI2D ROBO-PONG® http://www.newgy.com/docs/cms/instmanuals/1119_Comb_Own_Man_Fr_web.pdf Dossier de présentation Page 27 / 27
Vous pouvez aussi lire