Les robots destinés aux centrales nucléaires
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous

Les robots
destinés
aux
centrales
nucléaires
par Taylor Moore
Odax, robot marcheur polyvalent. (Photo: Odetici
Aux Etats-Unies, les moyens robotiques mis en œuvre pour le nettoyage de TMI-2
et dans d'autres centrales nucléaires ont suscité un grand intérêt et amené à entreprendre
des recherches sur la meilleure façon d'utiliser les robots
Longtemps relégués au domaine Selon l'Association des industries duction et en améliorant la qualité
de la science fiction, les robots, au de la robotique (Robotics Industries des produits. Mais, pour certaines
cours des dernières années, ont Association), 6300 robots seulement industries, l'intérêt des robots est
captivé l'attention du public et du avaient été livrés aux Etats-Unis à la qu'ils peuvent fonctionner dans des
secteur industriel d'une manière fin de 1983; la plupart d'entre eux milieux dangereux et, partant,
spectaculaire. De nombreux obser- étaient en service depuis 1976. Or, réduire les risques que certaines
vateurs voient dans les robots le la force de l'évolution technologique tâches présentent pour l'homme.
signe d'un renouveau industriel qui et les pressions de la concurrence L'industrie de la production
insuffle un regain de vigueur écono- économique internationale laissent d'électricité en est un exemple.
mique et de compétitivité aux entrevoir une accélération de la mise Bien que la plupart des fabricants de
industries en dépression, en en oeuvre des robots dans les années robots ne considèrent pas que les
augmentant leur productivité et di- à venir. Certains experts prévoient compagnies d'électricité représentent
minuant leurs coûts de main d'oeuvre. que, d'ici 1990, quelque 100 000 un marché potentiel important,
D'un autre côté, les ouvriers en- robots seront peut-être en service ils n'en étudient pas moins des
visagent souvent avec appréhension aux Etats-Unis, soit un dixième du robots pour applications spéciales
l'idée de voir un robot exécuter une nombre total prévu pour le monde qui seront chargés d'assurer des
tâche qu'autrefois seul un être entier. tâches d'inspection et de mainte-
humain pouvait accomplir. Les in- Pour la plupart des industries, nance à l'intérieur des centrales nu-
cidences sociales de la robotisation comme celles de l'automobile, du cléaires où les niveaux de radioacti-
de l'industrie américaine deviendront travail des métaux et de la fabrica- vité, la chaleur et l'humidité
certainement un sujet de préoc- tion de machines, où l'on emploie excluent la présence d'être humains
cupation encore plus important pour ou envisage d'employer des robots, ou limitent considérablement leurs
les ouvriers, les chefs d'entreprises 0 s'agit essentiellement de préserver possibilités de travail. Pour bon
et les dirigeants, à mesure que les ou de reconquérir un avantage sur nombre des tâches à accomplir dans
robots pénétreront sur le marché du le marché de la concurrence en une centrale nucléaire, les robots
travail du secteur industriel. abaissant les coûts unitaires de pro- viendraient utilement compléter les
M. Moore est un rédacteur de l'équipe du Journal de l'EPRI dont le présent article est repris. L'EPRI est l'Institut de recherches sur
l'énergie électrique (Electric Power Research Institute) des Etats-Unis, B.P. 10412, Palo Alto, Californie 94303. Les membres de
l'EPRI qui ont contribué aux parties techniques du présent article sont Floyd Gelhaus, Michael Kolar, Thomas Law, Adrian Roberts et
R.K. Winkleblack.
A I E A B U L L E T I N , A U T O M N E 1985 31
Nucléo-énergétique et électronique
effectifs; ils libéreraient l'homme de employé dans les centrales nucléaires meilleurs résultats. En revanche,
certains des travaux les plus pénibles en deux grandes catégories: les pour les applications nucléaires, il
et les plus inconfortables et, éven- appareils à fin unique ayant une ne s'agit pas tant de remplacer
tuellement, permettraient d'accom- capacité opérationnelle limitée et les l'homme que de le prolonger, en lui
plir certaines tâches pendant que la robots programmables à fins mul- permettant par exemple d'accéder,
centrale resterait en marche, tiples ayant une certaine intelligence par robot interposé, dans des parties
réduisant ainsi les temps d'immobili- artificielle reposant sur l'emploi des centrales nucléaires où la tempé-
sation toujours coûteux, nécessaires d'ordinateurs. rature ou les rayonnements inter-
aux inspections et à la maintenance. «Je pense que la première caté- disent ou limitent le séjour de
Certains des robots à l'étude pour gorie a atteint une certaine maturité», l'homme.
application dans les centrales dit Taylor. Au Centre d'évaluation R.K. Winkleblack, directeur de
électriques représentent ce qui se non destructive de l'EPRI, ainsi que projet de l'EPRI à la Division de
fait de mieux en robotique et les chez des fabricants de réacteurs, l'énergie d'origine nucléaire,
travaux de recherche qu'ils sup- dans des entreprises de services nu- s'exprime ainsi: «Contrairement à
posent pourraient être à l'origine de cléaires et dans certaines compagnies ce qui se passe pour la plupart des
nouveaux progrès susceptibles de d'électricité, on emploie aujourd'hui applications robotiques, nous
nombreuses applications dans ces types d'appareils pour des tâches ne voulons pas remplacer l'homme.
d'autres industries. L'EPRI a telles que le découpage et le sondage Nous voulons qu'il reste dans le
plusieurs projets en cours qui des conduites, l'inspection et la circuit et qu'il puisse observer le
doivent permettre d'évaluer les pos- réparation des tubes des générateurs travail du robot, prendre des déci-
sibilités techniques et économiques de vapeur et le balayage ultrasonique sions et lui donner des ordres». Il
d'employer les robots pour certaines des canalisations pour y détecter ajoute: «A strictement parler, ce qui
opérations à effectuer dans les d'éventuelles fissures. «Ces appareils nous intéresse, ce sont des appareils
centrales, et de faire bénéficier de sont devenus absolument indispen- télécommandés et non de véritables
l'expérience ainsi acquise les spécia- sables; sans leur aide, nous ne robots.»
listes des centrales qui ne manquent pourrions tout simplement pas
pas de tâches pour lesquelles des assurer certaines tâches», ajoute Augmentation de la disponibilité
robots fiables, efficaces et d'un coût Taylor.
raisonnable, seraient les bienvenus. Le recours à des robots pour l'ins-
Pour les robots de la seconde pection et la maintenance des
De telles recherches ne donnent catégorie, ceux qui ont suffisam- centrales nucléaires est surtout
inévitablement leurs fruits qu'à ment d'intelligence artificielle infor- motivé, sur le plan économique, par
longue échéance. L'industrie de la matisée pour assurer diverses opéra- les possibilités qu'ils offrent
robotique qui, dans son acception la tions, «beaucoup reste encore à d'augmenter la disponibilité des
plus large, n'a pas encore 20 ans, en faire», dit Taylor, avant qu'ils centrales; accessoirement, ils per-
est à ses premiers balbutiements et fassent la preuve d'une utilité pra- mettent en outre de réduire la radio-
doit faire des progrès considérables tique réelle dans l'exploitation des exposition du personnel.
dans les domaines des systèmes de centrales nucléaires, mais de tels
visualisation, de la miniaturisation De nombreuses tâches d'inspec-
robots sont à l'étude et les premiers
et de la commande des ordinateurs tion et de maintenance ne peuvent
essais devraient permettre de se faire
avant que des robots vraiment éco- être assurées que si le réacteur est à
une idée assez exacte de leurs possi-
nomiques, adaptables et puissants l'arrêt, les niveaux de rayonnement
bilités.
ne deviennent monnaie courante sur étant trop élevés en conditions nor-
Peu après la réalisation de bras de males d'exploitation, même pour
le marché. Cependant les succès manipulation destinés aux cellules
obtenus au cours des dernières des personnes revêtues de tout un
chaudes et aux opérations de retrai- arsenal de vêtements protecteurs. On
années donnent à penser que de tement du combustible, un bras
telles machines sortiront des labora- repousse généralement ces tâches
monté sur chariot et doté de caméras jusqu'aux opérations programmées
toires et seront commercialisées et de projecteurs fit son apparition,
avant la fin de la présente décennie. de réapprovisionnement en com-
dans les années 1950, à la centrale bustible pour réduire au minimum
Les recherches que l'EPRI mène sur nucléaire de Hanford, dans l'Etat de
les applications de la robotique le temps d'immobilisation de la
Washington. Réalisé par Westing- centrale. Elles s'inscrivent ainsi dans
visent, en partie du moins, à faire en house Hanford Co., ce véhicule de
sorte que, le moment venu, les com- le trajet critique des activités
transport télécommandé fut baptisé nécessaires pour remettre la centrale
pagnies d'électricité aient une idée «Louie» après qu'un technicien eut
claire des tâches que les robots en service.
griffoné ce surnom sur le bras du
peuvent exécuter pour elles et robot. Louie qui s'est avéré un Ces temps morts, outre qu'ils sont
puissent juger s'il est rentable de les «travailleur» infatigable, adaptable coûteux, jouent un rôle fonda-
mettre en service. et robuste est encore en service mental dans la disponibilité des
aujourd'hui. centrales. L'énergie qu'il faut
acheter à l'extérieur pour remplacer
Des robots pour les centrales Certains aspects des applications la production d'un réacteur de
nucléaires
de ces appareils distinguent l'équi- 1000 MWe revient en moyenne à
pement robotique destiné aux usines 500 000 dollars par jour. Les robots
L'emploi d'équipements télécom- nucléaires des robots industriels plus pourraient en principe contribuer à
mandés et analogues à des robots connus, appareils immobiles qui augmenter la disponibilité des
pour protéger le personnel des servent aux opérations de simple centrales en évitant les délais que
centrales nucléaires dans les zones à manipulation ou autres tâches très supposent les immobilisations et
fort rayonnement n'est pas nouveau. répétitives. assurer certaines tâches tandis que le
John Taylor, un des vice-présidents Dans de nombreuses applications réacteur est en marche.
de l'EPRI et Directeur de la Division industrielles, on cherche à remplacer Pour le personnel des centrales
de l'énergie d'origine nucléaire, l'homme par des machines plus pro- nucléaires, les règlements fédéraux
divise l'équipement robotique ductives, plus précises et donnant de actuels prévoient que les expositions
32 AIEA B U L L E T I N , A U T O M N E 1985
Nucléo-énergétique et électronique
ne doivent pas dépasser 3 rem* efforcée de rechercher des possibilités pourrait être améliorée dans les
pour un trimestre ou 5 rem pour d'améliorer la disponibilité et de limites de l'état actuel de la robo-
une année. Il s'ensuit que, pour de réduire l'exposition aux rayon- tique. Des analyses coût-avantage
nombreux travaux de type courant, nements. ont été faites ultérieurement con-
un personnel nombreux doit être Dans chaque étude on a essayé de cernant l'emploi de robots pour le
affecté à une petite partie des tâches, quantifier le coût, en exposition nettoyage de l'intérieur des
chaque personne atteignant rapi- professionnelle aux rayonnements réacteurs, les enquêtes de radiopro-
dement la limite fixée pour l'exposi- et en heures-homme, de diverses tection et le boulonnage/déboulon-
tion professionnelle aux rayon- tâches qu'un robot pourrait nage de certaines pièces. Les moyens
nements et devant rester en dehors accomplir; on a ensuite comparé ces robotiques actuels pourraient assurer
des zones exposées jusqu'au coûts à ceux du robot, de ses ces tâches, mais l'étude conclut
trimestre suivant. Ainsi, les com- systèmes d'appui associés et du per- qu'elles ne peuvent être assurées par
pagnies doivent employer un grand sonnel correspondant. des robots sans nouveaux progrès
nombre d'employés «volants» qui Les tâches de surveillance et techniques.
passent à d'autres tâches une fois d'inspection évaluées dans l'étude En employant la méthode dite de
qu'ils ont reçu la dose limite. de la NRC comprennent la détection la valeur actuelle nette, les
Selon une estimation de la des fuites de vapeur ou d'eau, la chercheurs de Battelle ont conclu
Nuclear Regulatory Commission vérification de la position des que le coût des robots, conçus pour
(NRC) chaque rem-homme auquel le vannes et la lecture des instruments le nettoyage des réacteurs et les opé-
personnel est exposé représente de mesure pour déterminer les rations de boulonnage de main-
pour les compagnies un coût de niveaux de rayonnement dans les tenance, serait récupéré en
1000 dollars, certaines lui attribuent composants ainsi que diverses moins d'un an, alors que celui des
même une valeur pouvant atteindre méthodes d'échantillonnage pour applications en radioprotection le
5000 dollars. Certains types de détecter la contamination. L'étude serait en' trois ans environ. Les
travaux tels que les enquêtes de de l'EPRI s'est attachée à 22 tâches résultats ont ensuite fait l'objet de
radioprotection et les inspections des accomplies périodiquement ou calculs pour une gamme de durées
systèmes primaires de refroidis- pendant la réalimentation en com- d'immobilisation et de coûts de
sement des réacteurs peuvent faire bustible, notamment l'entretien l'exposition aux rayonnements.
intervenir des champs de rayon- du mécanisme des barres de com-
nement de plusieurs centaines de Il ressort de cette étude que,
mande, la réparation des conduites
rad par heure. même en retenant les valeurs les plus
du générateur de vapeur et la
faibles (700 dollars par rem-homme
Les compagnies d'électricité réparation de diverses pompes ou
d'exposition et 300 000 dollars pour
risquent même de se voir imposer vannes.
une journée d'immobilisation), le
des niveaux d'exposition plus strictes Bien que les diverses opérations coût de la robotisation des opérations
à l'avenir. Indépendamment des étudiées soient différentes, les deux de boulonnage de maintenance serait
directives qui prescrivent aux com- études concluent que l'emploi de récupéré en un peu plus d'un an,
pagnies de ramener les expositions robots dans les centrales nucléaires alors que celui des tâches de radio-
aux niveaux les plus bas qu'on présente des avantages économiques protection le serait en moins de
puisse raisonnablement atteindre, la très nets. L'étude de la NRC qui quatre ans. Dans l'ensemble, l'étude
NRC étudie depuis plusieurs années fait une analyse «coût-avantage» de fait état d'économies sur les coûts
déjà des propositions tendant à deux centrales en service conclut allant de 100 000 à 1 million de
rabaisser les normes d'exposition que les moyens robotiques actuel- dollars par robot, en valeur actuelle
professionnelle aux rayonnements; lement sur le marché peuvent être nette, le prix d'achat de chaque
une telle évolution pourrait exercer ajoutés après coup dans les centrales robot envisagé étant inférieur à
un effet multiplicateur sur ce que et qu'ils réduiront tant l'exposition 200 000 dollars.
les expositions du personnel coûtent des travailleurs que les coûts d'ex-
aux compagnies. ploitation. Les chercheurs de Battelle
appellent toutefois l'attention sur le
L'étude de la NRC fait toutefois nombre limité des robots spécialisés
Etudes de faisabilité observer que leur intérêt peut varier dans les applications nucléaires ac-
considérablement d'une centrale à tuellement sur le marché. L'industrie
L'EPRI et la NRC ont tous deux une autre, leur conception et l'histo- nucléaire n'ayant pas représenté
parrainé des études préliminaires rique de leur exploitation n'étant un marché de premier plan pour les
d'évaluation des possibilités d'appli- pas identiques. Le rapport fabricants de robots, ce domaine a
cation de la robotique dans les encourage les compagnies d'électri- été laissé à de petites entreprises qui
centrales nucléaires. La NRC, qui cité à faire des analyses coût- peuvent adapter des appareils robo-
visait essentiellement à réduire la avantage en fonction de chaque tiques et en fabriquer de petites
radioexposition du personnel, s'est centrale et à tenir compte notam- séries.
surtout intéressée aux tâches de ment du coût des entrées du per-
Il faut donc, conclut l'étude, que
surveillance et d'inspection dans une sonnel dans les zones radioactives
l'industrie nucléaire trouve les
étude faite par la Remote Techno- afin de déterminer si, pour de telles
moyens de financer ces réalisations
logy Corp. L'étude de l'EPRI inspections, les applications de la
et d'intéresser des entreprises prêtes
menée par Battelle, Columbus robotique sont rentables.
à protéger financièrement ces
Laboratories, s'est surtout attachée
Dans l'étude faite par Battelle techniques pendant la phase de dé-
aux travaux de maintenance et s'est
pour l'EPRI, on a fait un tri entre monstration de leur utilité. C'est là
les applications possibles à la une situation opposée à celle qui
maintenance, afin de retenir des existe au Japon où des rapports de
* Dans l'usage international, le rem a été
remplacé par le sievert, conformément tâches communes à de nombreuses coopération entre compagnies
aux recommandations de l'Organisation centrales nucléaires qui représentent d'électricité et fabricants de robots
internationale de normalisation. Un une partie importante des coûts de ont permis d'aborder le problème de
sievert vaut 100 rem. maintenance et dont l'exécution manière plus cohérente.
AIEA BULLETIN, AUTOMNE 1985 33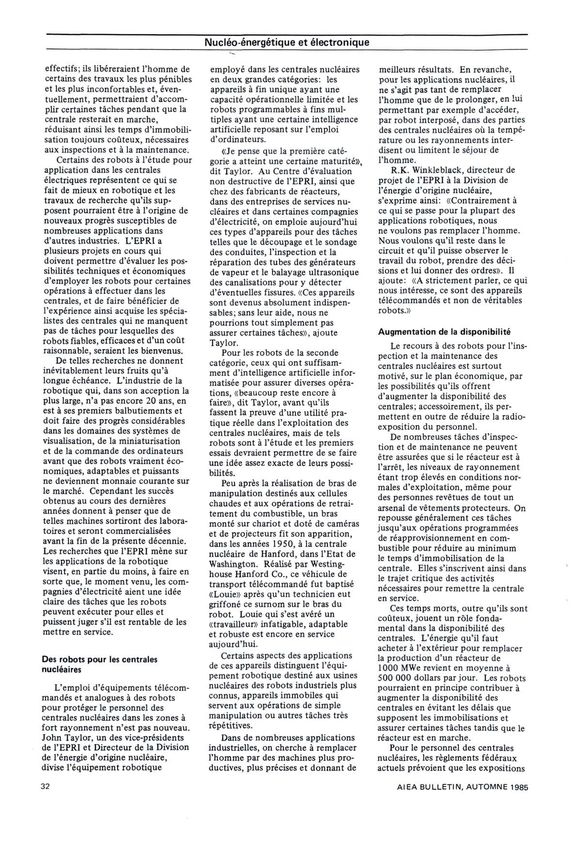
Les robots à Three Mile lsland-2 (TMI-2)
Les travaux de nettoyage et de remise en état du réacteur endommagé de T M I - 2 , en Pennsylvanie, sont un défi, unique en
son genre, pour l'application des techniques de la robotique. Deux manipulateurs télécommandés appelés Fred et SISI ont
déjà été mis en service pour des tâches de surveillance et de décontamination. Le RRV surnommé Rover — le balladeur — a
eu pour tâche d'inspecter le sous-sol contaminé du bâtiment de confinement du réacteur. Une piqueuse télécommandée a
été mise au point pour enlever la surface contaminée des sols en béton. Louie, spécialement modifié pour opérer à TMI-2,
doit relever les niveaux des rayonnements à mesure qu'on décontamine le réservoir de déminéralisation de l'eau de la
centrale. Rosa, bras de manipulation télécommandé à usage multiple, a été proposé pour aider à enlever le combustible du
cœur du réacteur de TMI-2.
Rosa
(enlèvement du combustible
du cœur du réacteur)
SISI
(Surveillance à distance)
Piqueuse télécommandée Fred
(décontamination) (décontamination)
34 AIEA B U L L E T I N , AUTOMNE 1985
Nucléo-énergétique et électronique
Réalisation de prototypes
Le gros des recherches de l'EPRI
en robotique consiste à participer
à la réalisation et aux essais de
plusieurs prototypes de robots qui
pourraient être les précurseurs de
machines qui seraient mises sur le
marché. Certains de ces robots
pourraient servir de véhicules de
transport portant d'autres appareils
robotiques tels que des déboulon-
neurs de brides ou des robots pour
réparation des tuyaux des géné-
rateurs de vapeur dans une zone à
fort rayonnement, mettant en
marche de petits appareils puis
surveillant les opérations. D'autres
en revanche, moins aptes à exécuter
des tâches astreignantes, pourraient
servir de maîtres robots intelligents
commandant les opérations de
robots plus puissants.
Plusieurs prototypes de robots
font leur apparition dans la remise
en état et le nettoyage de la tranche
endommagée de TMI-2, en Pennsyl-
vanie, où s'est produit en mars 1979
un accident dû à une perte de fluide IRIS (Industrial Remote Inspection System) est un robot universel pour environ-
de refroidissement qui a détruit une nements dangereux. (Photo: EPRI)
bonne partie du coeur du réacteur et
rendu inaccessible à l'homme de
grandes parties du bâtiment de con-
finement du réacteur où, par inspec- on a utilisé un véhicule chenille, à cette opération mais ses caméras
tion indirecte à distance on a relevé téléguidé et analogue à un char de télévision qui résistent aux
en certains endroits des champs de d'assaut pesant 11 kg fourni par rayonnements feront des relevés à
rayonnements atteignant DOE et appelé SISI (System In- proximité du réservoir de déminéra-
3000 rad/h.* Service Inspection), c'est-à-dire lisant, où l'on relève au contact un
système d'inspection en service, débit de dose de 3000 rad/h.
Selon Adrian Roberts, administra- pour faire des photographies et des La tentative la plus ambitieuse
teur principal des programmes à la relevés des rayonnements dans des faite jusqu'ici pour appliquer la robo-
Division de l'énergie d'origine zones entourant le système de puri- tique au nettoyage de TMI-2 a été la
nucléaire de l'EPRI et directeur du fication de l'eau d'alimentation de réalisation par le Laboratoire de
programme d'information et d'étude la centrale. Les filtres de ce système génie civil et de robotique de l'Uni-
sur l'accident de TMI-2, les mesures sont fortement contaminés par des versité Carnegie-Mellon (CMU), avec
de nettoyage de cette centrale ont produits de fission du système l'aide de l'EPRI, d'un véhicule de re-
donné une impulsion particulière- primaire de refroidissement du connaissance téléguidé (Remote Re-
ment forte à la réalisation de robots. coeur. Au printemps suivant, un connaissance Vehicle (RRV)) pour
«A la centrale de Three Mile Island, véhicule télécommandé à six roues, étudier la situation dans le sous-sol
le défi lancé à la robotique est baptisé Fred, a été doté d'une lance à du bâtiment de confinement du
vraiment d'actualité: il faut bien eau à haute pression pour décon- réacteur. Ce sous-sol, où personne
reconnaître que certaines tâches taminer les murs et le plancher d'un n'a pénétré depuis plus de cinq ans,
ne peuvent être exécutées que par compartiment réservé aux pompes reste fortement contaminé par les
télécommande et, vu qu'il nous est situé dans le sous-sol du bâtiment boues radioactives qui subsistent de
impossible d'attendre le nec plus annexe. Fred pèse 181 kg, son bras quelque 2300 mètres cubes d'eau, y
ultra en matière de robots, nous mécanique peut soulever 68 kg compris l'eau du circuit primaire de
tirons profit des réalisations faites jusqu'à une hauteur de 1,80 m. refroidissement dont la majeure
dans divers domaines pour mener à On a transporté à Three Mile partie a depuis été évacuée par
bien le travail qui doit être fait. S'il Island le vénérable Louie de pompage.
apparaît que les robots peuvent y Westinghouse Hanford pour y Le RRV, que la GPU Nuclear
être employés pour certaines tâches, effectuer des relevés radiologiques Corporation, société chargée des
on pourra les employer dans pendant la décontamination du opérations à Three Mile Island a sur-
d'autres centrales nucléaires système de purification de l'eau. nommé Rover (le balladeur), a eu
également.» Connu oficiellement en tant que pour tâche de pénétrer dans le sous-
De fait, on a essayé à plusieurs véhicule de transport téléguidé, sol obscur et humide où il a été
reprises d'employer des robots à Louie servira à surveiller les niveaux déposé à l'aide d'une grue,
TMI depuis l'accident. En août 1982, de rayonnements à mesure que les d'inspecter les lieux avec ses trois
résines déminéralisantes du système caméras de télévision et de faire des
d'approvisionnement en eau seront relevés radiologiques de la zone à
éliminées. La force de levage du l'aide de plusieurs instruments de
* Dans l'usage international, le rad a été robot (450 kg) ne sera pas nécessaire
remplacé par le gray. Un gray vaut 100 rad. détection montés à bord.
AIEA B U L L E T I N , A U T O M N E 1985 35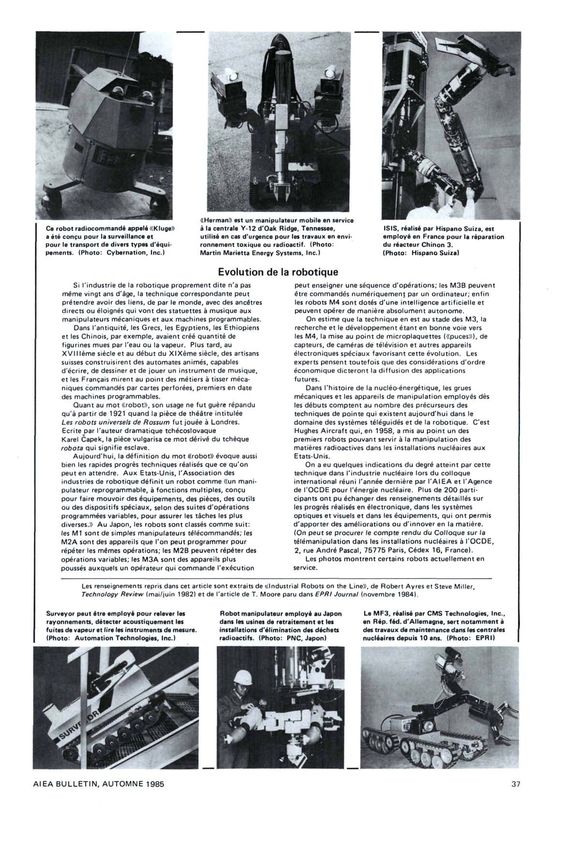
Nucléo-énergétique et électronique
Le RRV, véhicule à six roues, très puissants, fiables et mobiles. munications sans fil à haute fré-
pèse 450 kg; il a été réalisé grâce à Les opérations posent des problèmes quence, unique en son genre, et spé-
la coopération de EPRI, CMU, GPU de dimension et de possibilités cialement conçu pour fonctionner
Nuclear, DOE et la Ben Franklin d'intervention rapide et les équipe- dans un environnement encombré
Partnership (Pennsylvanie), et conçu ments qui relèveront les défis d'obstacles matériels, lequel lui
par William Whittaker, professeur devront être eux-mêmes bien dimen- assure une mobilité et un rayon
assistant de génie civil et directeur sionnés et capables d'intervenir dans d'action supérieurs aux possibilités
du laboratoire de robotique. Il porte toutes les circonstances. Mais il de la plupart des robots réalisés à ce
un cordon ombilical à enroulement n'existe certainement pas d'appareil jour. Un bras téléscopique sur
d'un type nouveau, qui permet au universel; c'est pourquoi nous nous lequel est monté un système de télé-
véhicule de contourner les obstacles intéressons à une famille d'appareils vision en trois dimensions avec télé-
sans avoir à traîner son cordon de ce genre. Une possibilité consis- objectif et microphone placés sur un
ombilical. Un bâti en acier inoxy- terait à avoir un RRV de taille support rotatif inclinable porte la
dable, monté sur la base du trans- normale qui superviserait l'activité charge utile normale à 32 kg. Ulté-
porteur, porte l'enrouleur, les d'un porte-outils. Une autre possi- rieurement, IRIS sera doté d'une
caméras, les instruments de sur- bilité serait une version miniaturisée intelligence limitée qui lui per-
veillance et les systèmes de com- qui serait téléguidée depuis sa base.» mettra de revenir sur son chemin,
mande. Le véhicule a également été De toute façon, les appareils de même si les signaux de commande
conçu de façon à pouvoir être dé- type robot se montrent des outils normaux ne lui parviennent pas ou
contaminé rapidement par arrosage précieux pour la remise en état de la sont brouillés.
à l'eau. centrale de Three Mile Island. Selon Floyd Gelhaus, chargé du
Une équipe de deux personnes D'autres applications de robots sont programme à l'EPRI, qui étudie les
commande le RRV à partir d'un également prévues sur ce site. Un possibilités d'application d'IRIS et
pupitre doté d'écrans de surveillance bras de télémanipulation construit d'autres robots dans les centrales
et suffisamment éloigné de la zone par la Westinghouse Electric Co., nucléaires, l'appareil construit par
dangereuse (à Three Mile Island cette appelé Rosa (Remotely Operated ARD a été conçu uniquement
distance est de 150 mètres); une Service Arm), a été proposé pour comme véhicule de surveillance télé-
personne dirige l'appareil et manipule assurer l'enlèvement du combustible guidé. Gelhaus précise que «ses pos-
les caméras tandis que l'autre du coeur du réacteur qui devrait sibilités d'effectuer des travaux de
s'occupe de l'enrouleur du cordon avoir Heu l'année prochaine. Rosa, force sont limitées, mais sa mobilité
ombilical. Des équipes d'opérateurs qui peut également fonctionner sous et sa liberté de mouvement, joints à
se sont exercées pendant plusieurs l'eau est déjà connu de certaines sa capacité de transporter divers
mois à manœuvrer le RRV le long compagnies d'électricité qui types d'appareils, en font un élément
d'un parcours d'obstacles improvisé exploitent des réacteurs à eau sous précieux».
dans le bâtiment des turbines voisin pression pour sa capacité d'inspecter Gelhaus a l'intention de sou-
(base de bon nombre d'opérations et de réparer les tuyauteries de mettre IRIS à des essais conduits par
de nettoyage) avant de le descendre générateurs de vapeur une fois mis des techniciens du Centre d'évalua-
à pied d'oeuvre. en place par le personnel chargé de tion non destructive de l'EPRI avant
Le RRV est le premier d'une série la maintenance. de le mettre à l'oeuvre dans l'environ-
de trois véhicules téléguidés ana- nement non radioactif d'une centrale
logues qui seront réalisés pour la re- récemment construite. La Duke
mise en état de la centrale. Une des Des robots en réserve Power Co. a obligeamment accepté
caractéristiques importantes est que que les essais aient lieu dans sa
le bâti monté sur le châssis peut être Indépendamment des robots mis
nouvelle centrale nucléaire de
enlevé et que l'on peut ajouter en service à Three Mile Island,
Catawba. La deuxième étape con-
d'autres équipements sur le véhicule. l'EPRI évalue deux autres prototypes
sistera à soumettre l'appareil à des
Le deuxième véhicule RRV, modifié qui pourraient intervenir utilement
essais et à une évaluation dans une
par Pentek Inc., entreprise travail- dans les centrales nucléaires. Ces
centrale en exploitation.
lant pour le compte de l'EPRI sur le appareils pourraient devenir des
site de Three Mile Island, est doté cousins de ceux qui sont employés à Gelhaus étudie également les pos-
d'une piqueuse pneumatique et d'un Three Mile Island et faire partie de sibilités d'application d'un robot
système d'aspiration pour enlever la famille qu'envisage Whittaker. appelé Odex, qui a six jambes, se
la couche supérieure du béton des Un d'entre eux, fabriqué par déplace librement, et est sans doute
sols contaminés dans certaines Advanced Resource Development le robot le plus perfectionné à ce
parties du bâtiment du réacteur. (ARD) Corp. est un système jour. Le prototype Odex, construit
d'inspection téléguidé appelé IRIS par Odetics, Inc. est, selon Gelhaus,
Le troisième RRV reste au labo- (Industrial Remote Inspection une innovation remarquable vu son
ratoire de robotique CMU en vue System). Conçu comme robot uni- rapport force/poids; il peut soulever
d'améliorations futures. Parmi les versel de surveillance et d'inspection plus de cinq fois et demie son
nouvelles tâches envisagées qui en milieux dangereux, IRIS est un propre poids (qui est d'environ
nécessiteront des modifications du transporteur de dimensions 170 kg). La plupart des autres
prototype du RVV figurent le modestes (si on le compare au RRV), robots existants ne peuvent guère
prélèvement d'échantillons de alimenté par batteries et chenille, soulever plus que le vingtième de
liquide et de boues dans le sous-sol qui peut être doté de capteurs de leur poids. «Avec une telle
du confinement, le prélèvement signaux optiques, acoustiques ou puissance, de nombreuses applica-
d'échantillons de béton au sol et sur autres émis par l'environnement, de tions sont possibles», dit Gelhaus.
les murs, et quelques petits dé- manipulateurs, ainsi que de sous- Odex a fait aux Etats-Unis des dé-
montages de structures. systèmes de télécommunication et monstrations enregistrées sur
Whittaker, concepteur du RRV de commande. cassettes vidéo; on voit notamment
explique: «A Three Mile Island on L'IRIS (qui pèse quelque 90 kg) ce robot soulever l'extrémité d'une
s'intéresse à des véhicules de travail comporte un système de télécom- camionnette.
36 AIEA BULLETIN, AUTOMNE 1985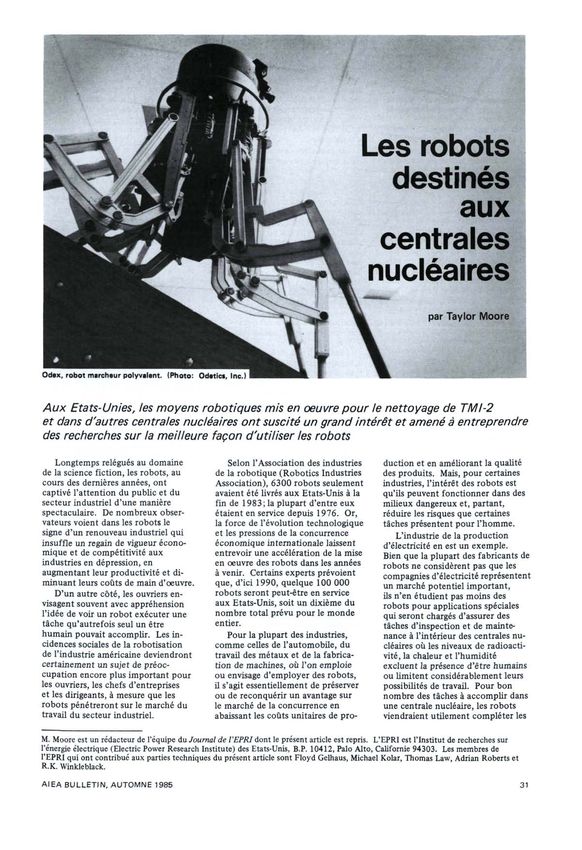
«Herman» est un manipulateur mobile en service
Ce robot radiocommandé appelé «Kluge» à la centrale Y-12 d'Oak Ridge, Tennessee, ISIS, réalisé par Hispano Suiza, est
a été conçu pour la surveillance et utilisé en cas d'urgence pour les travaux en envi- employé en France pour la réparation
pour le transport de divers types d'équi- ronnement toxique ou radioactif. (Photo: du réacteur Chinon 3.
pements. (Photo: Cybernation, Inc.) Martin Marietta Energy Systems, Inc.) (Photo: Hispano Suiza)
Evolution de la robotique
Si l'industrie de la robotique proprement dite n'a pas peut enseigner une séquence d'opérations; les M 3 B peuvent
même vingt ans d'âge, la technique correspondante peut être commandés numériquement par un ordinateur; enfin
prétendre avoir des liens, de par le monde, avec des ancêtres les robots M 4 sont dotés d'une intelligence artificielle et
directs ou éloignés qui vont des statuettes à musique aux peuvent opérer de manière absolument a u t o n o m e .
manipulateurs mécaniques et aux machines programmables. On estime que la technique en est au stade des M 3 , la
Dans l'antiquité, les Grecs, les Egyptiens, les Ethiopiens recherche et le développement étant en bonne voie vers
et les Chinois, par exemple, avaient créé quantité de les M 4 , la mise au point de microplaquettes («puces»), de
figurines mues par l'eau ou la vapeur. Plus tard, au capteurs, de caméras de télévision et autres appareils
X V I I lème siècle et au début du X I X è m e siècle, des artisans électroniques spéciaux favorisant cette évolution. Les
suisses construisirent des automates animés, capables experts pensent toutefois que des considérations d'ordre
d'écrire, de dessiner et de jouer un instrument de musique, économique dicteront la diffusion des applications
et les Français mirent au point des métiers à tisser méca- futures.
niques commandés par cartes perforées, premiers en date Dans l'histoire de la nucléo-énergétique, les grues
des machines programmables. mécaniques et les appareils de manipulation employés dès
Quant au m o t «robot», son usage ne fut guère répandu les débuts comptent au nombre des précurseurs des
qu'à partir de 1921 quand la pièce de théâtre intitulée techniques de pointe qui existent aujourd'hui dans le
Les robots universels de Rossum fut jouée à Londres. domaine des systèmes téléguidés et de la robotique. C'est
Ecrite par l'auteur dramatique tchécoslovaque Hughes Aircraft q u i , en 1 9 5 8 , a mis au point un des
Karel Capek, la pièce vulgarisa ce mot dérivé du tchèque premiers robots pouvant servir à la manipulation des
robota qui signifie esclave. matières radioactives dans les installations nucléaires aux
A u j o u r d ' h u i , la définition du m o t «robot» évoque aussi Etats-Unis.
bien les rapides progrès techniques réalisés que ce qu'on On a eu quelques indications du degré atteint par cette
peut en attendre. A u x Etats-Unis, l'Association des technique dans l'industrie nucléaire lors du colloque
industries de robotique définit un robot comme «un mani- international réuni l'année dernière par l'Ai E A et l'Agence
pulateur reprogrammable, à fonctions multiples, conçu de l ' O C D E pour l'énergie nucléaire. Plus de 2 0 0 parti-
pour faire mouvoir des équipements, des pièces, des outils cipants ont pu échanger des renseignements détaillés sur
ou des dispositifs spéciaux, selon des suites d'opérations les progrès réalisés en électronique, dans les systèmes
programmées variables, pour assurer les tâches les plus optiques et visuels et dans les équipements, qui ont permis
diverses.» A u Japon, les robots sont classés comme suit: d'apporter des améliorations ou d'innover en la matière.
les M 1 sont de simples manipulateurs télécommandés; les (On peut se procurer le c o m p t e rendu du Colloque sur la
M 2 A sont des appareils que l'on peut programmer pour télémanipulation dans les installations nucléaires à l ' O C D E ,
répéter les mêmes opérations; les M 2 B peuvent répéter des 2, rue André Pascal, 7 5 7 7 5 Paris, Cedex 16, France).
opérations variables; les M 3 A sont des appareils plus Les photos m o n t r e n t certains robots actuellement en
poussés auxquels un opérateur qui commande l'exécution service.
Les renseignements repris dans cet article sont extraits de «Industrial Robots on the Line», de Robert Ayres et Steve Miller,
Technology Review (mai/juin 1982) et de l'article de T. Moore paru dans EPRI Journal (novembre 1984).
Surveyor peut être employé pour relever les Robot manipulateur employé au Japon Le M F 3 , réalisé par CMS Technologies, Inc.,
rayonnements, détecter acoustiquement les dans les usines de retraitement et les en Rép. féd. d'Allemagne, sert notamment à
fuites de vapeur et lire les instruments de mesure. installations d'élimination des déchets des travaux de maintenance dans les centrales
(Photo: Automation Technologies, Inc.) radioactifs. (Photo: PNC, Japon) nucléaires depuis 10 ans. (Photo: EPRI)
AIEA BULLETIN, AUTOMNE 1985 37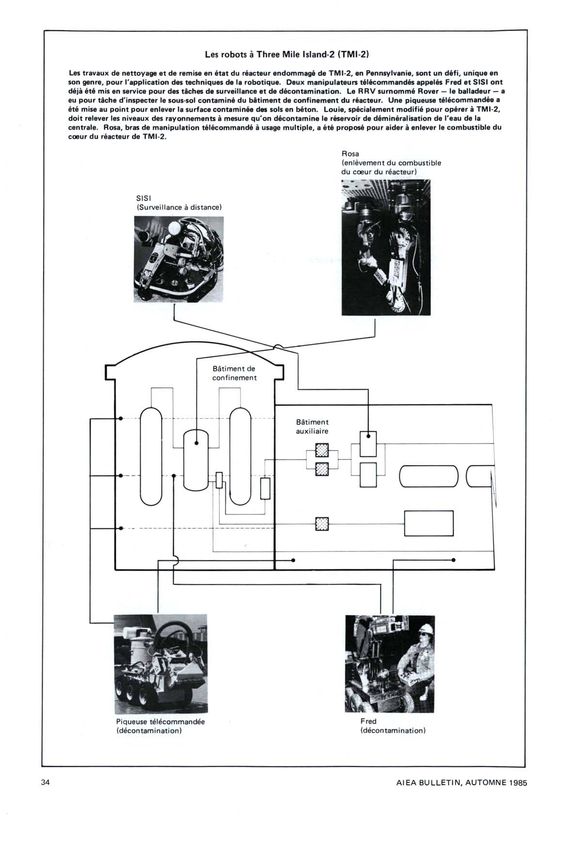
Nucléo-énergétique et électronique
Chacune des jambes d'Odex a Advanced Research Projects Agency «Le problème peut être abordé de
son propre microprocesseur, tandis (Agence de recherches d'avant-garde deux manières. La première con-
qu'un septième assure la coordina- pour la défense). D'autres études siste à construire un robot, bardé de
tion de l'ensemble des mouvements; menées aux Universités de Stanford, capteurs et qui ouvre simplement
il est ainsi possible d'exécuter des de Purdue et du Michigan, à ses yeux et ses oreilles sans toucher
manoeuvres complexes sous les l'Institut de technologie du à quoi que ce soit. La seconde est
ordres d'un opérateur ou d'un ordi- Massachusetts et à l'Université de s'arranger pour tirer parti de
nateur de commande à distance. Carnegie-Mellon (CMU) portent sur toutes les données relatives aux
L'appareil peut faire un tour complet des activités de recherche et de dé- dimensions déjà enregistrées qui
sur lui-même tout en avançant dans veloppement soit non militaires figurent sur les dessins et dans les
n'importe quelle direction voulue. soit rattachées au domaine militaire. systèmes de conception informatisés.
Ses jambes articulées lui permettent Irving Oppenheim, professeur Nous cherchons quelle est la struc-
de prendre six positions distinctes associé à la CMU, travaille avec ture de données informatiques la
allant d'une station debout très l'EPRI à certains aspects du pro- plus indiquée pour ce problème.»
groupée pour franchir les portes blème dans un projet de recherche La conception de centrales en ré-
étroites à la station accroupie. Odex mené pour évaluer les possibilités servant la place des robots est un
est équipé de caméras de télévision d'appliquer l'intelligence artificielle autre domaine où l'EPRI sub-
jumelées, pour la transmission des robots aux travaux de construe- . ventionne les recherches. Bon
d'images. tion et de maintenance. Les nombre des difficultés que soulève
Selon Gelhaus «Odex représente Japonais font déjà un grand usage aujourd'hui l'emploi d'un robot
une percée technique, mais il faut d'appareils automatiques pour sont dues à ce qu'on n'avait pas
encore faire des recherches sérieuses diverses tâches de construction mais, songé à de tels appareils quand on a
pour en définir les applications dans d'une manière générale, il ne s'agit construit les premières centrales; les
une centrale nucléaire». La collabo- pas d'appareils dits intelligents. centrales à réacteurs de pointe de
ration de l'EPRI avec Odetics a Selon Oppenheim, pour rendre les l'avenir seront vraisemblablement
conduit à des modifications d'agen- robots autonomes, il faut, premi- spécialement conçues pour recevoir
cement qui devraient permettre à èrement, qu'ils puissent détecter et des robots de surveillance ou de
Odex de franchir le parcours éviter logiquement les obstacles et, maintenance.
d'obstacles internes d'une centrale deuxièmement, trouver un moyen Au titre d'un contrat de l'EPRI,
nucléaire. de modéliser l'environnement tridi- la Division des systèmes de pointe
mensionnel de travail du robot afin de Westinghouse a étudié la possi-
Evolution future qu'il puisse se référer à sa «carte du bilité d'employer des robots dans de
monde» à mesure qu'il progresse grands prototypes de réacteurs sur-
Technologiquement parlant,
dans sa mission. générateurs. L'étude a envisagé
Odex est peut-être très voisin du
«On a déjà fait quelques tentatives diverses tâches courantes et non
robot intelligent, entièrement auto-
pour définir le programme mathé- courantes d'inspection et de main-
nome, qui, pour les chercheurs,
matique qui permettra à un robot tenance et dégagé des facteurs sus-
représenterait l'union idéale entre
de trouver une configuration lui ceptibles d'intensifier l'emploi des
l'automatisation de la machine et le
permettant d'éviter un obstacle. robots. Il s'agit notamment de
domaine naissant de l'intelligence
Nous travaillons déjà avec les pro- prévoir des zones de travail et
artificielle. Sa capacité à contourner
grammes existants, que nous sou- d'accès appropriées et des prises pour
et à franchir des obstacles sous les
mettons à des essais, dont nous dé- l'éclairage et la force, et d'agencer
ordres télécommandés d'un opéra-
terminons les insuffisances et que convenablement les équipements et
teur n'est pas loin du degré d'intégra-
nous modifions pour pouvoir autres éléments susceptibles de pro-
gration qu'il faudra atteindre pour
atteindre certains objectifs qu'im- voquer des obstructions.
qu'un robot puisse réagir automati-
quement à un programme de pliquent cette aptitude à éviter les A mesure que l'on réalisera des
directives en se référant à une base obstacles», dit Oppenheim. «Par robots spécialisés, à applications
de données autonome pour connaître exemple, nous cherchons à savoir si nucléaires, l'évaluation technique de
son emplacement, sa destination, un algorithme de commande peut ces appareils en fonction des besoins
son itinéraire et les tâches qu'il doit déterminer comment on peut com- des compagnies d'électricité prendra
accomplir. mander un robot de contourner plus d'importance. Le Centre d'éva-
deux canalisations pour se diriger luation non destructive de l'EPRI
Consommer l'union entre les pourra assumer des responsabilités
vers une troisième et l'atteindre.»
robots et l'intelligence artificielle accrues à cet égard, vu qu'il a déjà
reste toutefois un objectif de re- Les progrès dans ce second participé à l'évaluation technique
cherche à long terme, car cela sup- domaine des recherches, c'est-à-dire d'IRIS.
pose que l'on repousse les frontières doter le robot d'un modèle tridimen-
des possibilités de modélisation des sionnel précis de l'environnement
ordinateurs dans le domaine de la dans lequel il est appelé à fonc- Perspectives d'avenir
géométrie dans l'espace et que l'on tionner, pourrait un jour permettre La campagne bien dirigée de re-
arrive à structurer des quantités au robot d'utiliser les dessins ori- cherche et de développement et les
énormes de données informatiques ginaux et les plans définitifs mémo- besoins immédiats des centrales
auxquelles le robot puisse accéder risés de toute une centrale. nucléaires qui cherchent à réduire
logiquement. Il existe des pro- Oppenheim ajoute: «Il doit pouvoir les coûts de maintenance et à
grammes de recherche militaires et exister une structure de données et abaisser les radioexpositions profes-
non militaires qui contribueront à un programme d'ordinateur qui sionnelles ouvre de nouvelles
la solution du problème. Les pro- permettent de mémoriser toutes les perspectives pour l'emploi des robots
grammes militaires sont en grande dimensions de la centrale, les à des tâches que la plupart des gens
partie financés par l'Office of Naval ouvertures dans les murs, les espaces préfèrent ne pas devoir assurer.
Research (Bureau de recherches à trois dimensions, les canalisations, Malgré les résultats spectaculaires
pour la marine) et la Defense les intersections, etc. obtenus à ce jour, les chercheurs
38 AIEA B U L L E T I N , A U T O M N E 1985Vous pouvez aussi lire

















































