Projet AdaP2E - Journée Robotique Agricole, Bercy, Paris - 04/09/2017 Adaptive Autonomous Production Platform for Environment
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous

Projet AdaP2E
Adaptive Autonomous Production Platform for Environment
Plate-Forme de production adaptative et autonome pour l'environnement
Journée Robotique Agricole, Bercy, Paris – 04/09/2017
Contexte et enjeux
Besoins sociétaux
Assurer la sécurité des biens et personnes
• Réduire les risques pour l’opérateur
• Réduire les risques pour les machines Nouveaux moyens de
• Réduire l’impact environnemental production efficaces
Garantir des niveaux de production suffisant et sûr
• Accroissement de la population mondiale
• Utilisation de parcelles difficilement exploitables
Vers le déploiement de solutions robotiques
● Améliorer la prise de décision
Intervenir aux bons moments
Réduire les surtraitements
● Réduire la pénibilité et le risque
Éliminer les travaux difficiles et répétitifs
Eliminer l'exposition opérateur et réduire l'impact environnemental
● Optimiser les tâches
Améliorer la précision des actions
Accroître la répétabilité et la productivité
Des solutions émergentes mais limitées
Contexte et enjeux
Un contexte dynamique et incertain
● Variabilité des conditions d'évolution
Types et propriétés des sols
Géométries du terrain
Conditions météos
Environnement
● Variabilité des tâches à réaliser
Structuration de l'environnement & densité
Charges et outils à embarquer
Interaction avec le sol/la végétation
Interaction avec les opérateurs
Vitesse de travail
Besoin d'adapter un système robotique au contexte et à la tâche
Objectif du projet
Développer une plate forme avec des niveaux d'autonomie variables, capable
d'adapter sa configuration au contexte de la tâche, de l'environnement et des réaction
humaines
Système robotique reconfigurable
Conception plate-forme reconfigurable
● Besoin et cahier des charges
Application privilégiée
Requérant +sieurs degré de mobilité
Roues motrices et directrices Voie (+ empattement) variables
Suspensions actives Charge utile 200kg
Garde au sol et inclinaison variables Vitesse → 30 km/H
● D'un robot à un système robotique reconfigurable
Conception de robots jumeaux
Associable en fonction des tâches/terrain
Vitesse max : 40km/H
4 braquages indépendants (+/-55°)
4 moteurs roues indépendants
Suspensions pilotables à terme
Comportements élémentaires
Diversité des contextes
● Travaux agricoles ● Conditions mobilité ● Perception environnement
Type de tâches Adhérence Structuration environnement
Culture Géométrie du sol Perturbation (luminosité/poussière)
Pour réaliser plusieurs scénarios
Développement de comportements types
- M1 : Suivi de rang à (a) basse vitesse (b) haute vitesse - P1 : GPS Cinématique
- M2 : Manoeuvre de changement de rang - P2 : Caméra classique
- M3 : Maintien de stabilité - P3 : Caméra RGB-D
- M4 : Analyse de traversabilité et passage d'obstacle - P4 : VeloDyne (Lidar 3D)
- M5 : Adaptation des propriétés des suspensions - P5 : Laser (1 nappe)
- M6 : Suivi de trajectoire absolue à haute vitesse sur terrain structuré - P6 : Centrale inertielle (toujours OK)
- M7 : Adaptation des commandes aux besoins de perception - P7 : Bumper (toujours OK)
- M8 : Suivi de cible mouvante - P8 : UWB (coop)
- M9 : Association robots
Comportements élémentaires
Modes de commande
● M9 Association de robot par UWB (P8)
Déplacement un robot par Mx (M8->Baudet-Rob)
Estimation pose reative par UWB (brevet)
Contrôle indépendant latral longitudinal
Observation de la vitesse relative
Sélection des comportements élémentaires
Représentation par machine à états
● Chaque comportement vu comme un état
● Description commune sous ROS
Transfert de toute la bibliothèque sous ROS
Réécriture des drivers des robots
Ouverture à la communauté robotique
Planification et supervision des transitions
● Planification préalable spatiale et temporelle
Basée sur l'expertise métier
Chaque état représente un mode (A, B, C )
Recherche des chemins possibles et optimal
Supervision temps réelles des transitions
●
Analyse des transitions possibles entre mode
Vérification du passage
Transition de modes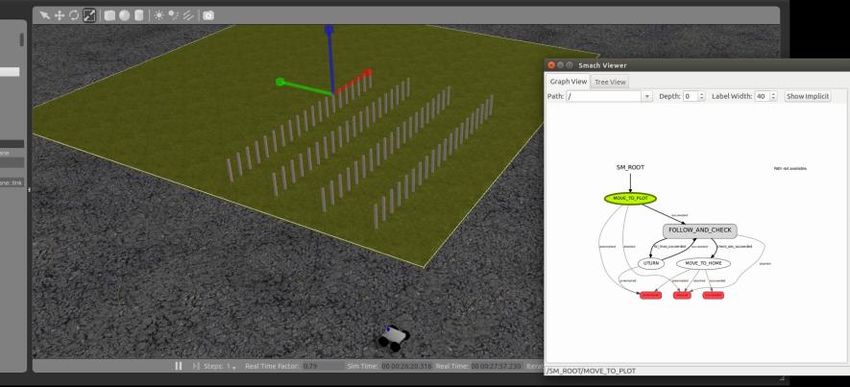
Planning et poursuite des travaux
Génération des lois de commande élémentaires et pilotage reconfiguration
Mise en service robots
Transfert algorithmes
Mise en œuvre supervision
Validation des scénarios
Permanents : Lama Al-Bassit CDD :
Istiven Appavoo
Michaël Alain
Adrian Couvent
Bernard Benet
Guy Brenon
Christophe Cariou Doctorants :
Myriam Chanet
Mahmoud Al-Masri
Christophe Debain
Mathieu Deremetz
Philippe Heritier Camille Dubos
Jean Laneurit
Thibault Tourrette
Roland Lenain
Rim Saddem
Unité TSCF Raphaël Rouveure
Jean-Christophe Roux Jean-François Bonicel
Directeur Unité : Jean-Pierre Chanet
Simon Sayegh Olivier Naud
Directeur Unité adjoint : Michel Berducat
Nicolas Tricot Vincent de Rudnicky
Adap2E
Equipe Robotique et mobilité pour l'environnement et l'agriculture (Romea)
Comportements élémentaires
Modes de commande
● M1 Suivi de trajectoire (P1-5)
Commande adaptative et prédictive Modèle cinématique + Modèle dynamique
Changement de stratégie en fonction de la Nouvelles approches d'observation et de commande
vitesse
Ecart latéral avant Calcul orientation Calcul vitesse lacet
Ecart Angulaire Erreur lacet Calcul angle
Cible + angle arrière cible de braquage avant
De 3 à 20 km/H
Sol peu adhérent
Variation géométrie solComportements élémentaires
Modes de commande
● M1 et M2 Suivi de structure par laser (P5)
Filtrage des points
Détermination d'ensemble de points
Estimation des formes
Génération de trajectoire
Découplage vitesse angulaire/linéaireContribution du projet Adap2E
Publications
● RICL : 2 ● CICL : 5 ● Brevet: 2 (en cours d'analyse)
Advanced Robotics ICRA 2017 Robots pulvérisation
Journal of Field Robotics IFAC 2017
Modulation pulvé automatisée
Efita 2016
Article TI robotique agricole Ageng 2016
Diffusion et communication
● Articles de presse généraliste : 4 ● Articles de presse spécialisée ou locale : 6
Les échos Le Monde (été 2017) TV Sud Farminguk
Sciences et Avenir Natura-Sciences La marne Viticole
Techniques de l'Ingénieur Travaux et innovation Travaux et innovation
The Conversation Agroligne SIMA2017
Démonstrations
● Salon de l'Agriculture 2016 (1 peu 2017)
● Salon international du machinisme agricole 2017
● Journée de l'Europe 2016
● Techdays Robotechs 2017
● Rob'Olympiade
● Nuit AgroécologieVous pouvez aussi lire

















































