Manuel d'utilisation (fr) - 06/2019 v.1.3 - Mobile Industrial Robots
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous

Manuel d’utilisation (fr) 06/2019 v.1.3
Droit d’auteur et avis de non-responsabilité Tous droits réservés. Aucune partie du présent manuel ne peut être reproduite sous une forme quelconque sans le consentement écrit exprès de Mobile Industrial Robots A/S (MiR). MiR ne donne aucune garantie, expresse ou implicite, quant au présent document ou à son contenu. Par ailleurs, le contenu du document peut être modifié sans préavis. Toutes les mesures de précaution ont été prises dans le cadre de l’élaboration du présent manuel. Cependant, MiR décline toute responsabilité en cas d'erreur ou d'omission, mais également de tout dommage découlant de l’utilisation des renseignements qui y sont énoncés. Copyright © 2017-2019 par Mobile Industrial Robots A/S. Contactez le fabricant : Mobile Industrial Robots A/S Emil Neckelmanns Vej 15F DK-5220 Odense SØ www.mir-robots.com Téléphone : +45 20 377 577 E-mail : support@mir-robots.com Registre central des entreprises : 35251235 MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 2

Sommaire 1. À propos de ce document 5 1.1. Où trouver d’autres informations 5 1.2. Historique du document 6 2. Sécurité 7 2.1. Types de message de sécurité 7 2.2. Consignes de sécurité générales 8 2.3. Usage prévu 10 2.4. Mauvaise utilisation prévisible 11 2.5. Évaluation des risques 12 2.6. Risques résiduels 13 2.7. Interfaces et fonctions de sécurité 13 2.8. Limitations des fonctions de sécurité 13 2.9. Batterie au lithium 15 3. Démarrage 16 3.1. Dans la caisse 16 3.2. Déballage de la caisse MiR100 17 4. Mise en service 19 4.1. Mise en route 19 4.2. Connexion à l’interface robot 23 4.3. Utiliser le robot en Manual mode (Mode manuel) 24 4.4. Vérification de l’état du matériel 26 4.5. La charge du robot 26 4.6. Mise hors tension du robot 29 5. Présentation du produit 30 5.1. Caractéristiques principales de MiR100 30 5.2. Étiquette d’identification 32 5.3. Pièces externes de MiR100 32 5.4. Pièces internes de MiR100 34

5.5. Système de capteurs 36 5.6. Témoins lumineux 43 6. Entretien 44 6.1. Opérations d’entretien et vérifications hebdomadaires régulières 44 6.2. Opérations de remplacement et vérifications régulières 46 6.3. Emballage pour transport 49 7. Applications 51 7.1. Installer un module supérieur 51 8. Spécifications relatives à la charge utile 53 9. Spécifications relatives à l’interface 56 9.1. Interface d’application 56 9.2. Arrêt d’urgence 57 10. Mise à jour du logiciel MiR100 58

1. À propos de ce document
1. À propos de ce document
Ce document contient les informations suivantes :
• Comment démarrer et utiliser MiR100.
• Présentation du produit.
• Applications typiques.
• Directives pour assurer le bon entretien du robot.
1.1. Où trouver d’autres informations
Les ressources supplémentaires suivantes sont disponibles sur www.mir-robots.com. Pour
consulter les pages sur le site du distributeur, connectez-vous à votre compte distributeur sur
http://www.mobile-industrial-robots.com/en/account/.
• Site du distributeur > Manuals (Manuels)
http://www.mobile-industrial-robots.com/en/account/manuals/
Cette page propose les ressources suivantes :
- Démarrage rapide MiR100
Ce petit manuel vous explique comment mettre rapidement en route le robot. Ce docu-
ment se trouve dans la caisse avec le robot au format papier. Disponible dans plusieurs
langues.
- Guide d’utilisation MiRCharge 24V.
Ce guide d’utilisation vous explique comment configurer MiRCharge 24V et para-
métrer MiR100 pour recharger automatiquement la batterie sur la borne de recharge.
- Manuel de référence Interface Robot MiR 2.0.
Cet outil de référence décrit les éléments de l’interface MiR100. Disponible dans plu-
sieurs langues.
- Référence API REST MiR100.
La référence API REST pour le robot.
• Site du distributeur > Download (Télécharger)
http://www.mobile-industrial-robots.com/en/account/download/
Cette page propose les ressources suivantes :
- Dessins CAO.
Cliquez sur Afficher les fichiers CAO pour consulter la liste des dessins CAO disponibles.
- Certificats.
Cliquez sur Afficher les certificats pour consulter la liste des certificats du robot.
MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 5
1. À propos de ce document
• Site du distributeur > How to (Guides pratiques)
http://www.mobile-industrial-robots.com/en/account/how-to/
Cette page propose des articles pratiques expliquant comment effectuer des tâches spé-
cifiques.
• Page du produit MiR100
http://www.mobile-industrial-robots.com/en/products/mir100/
Cette page contient les spécifications, des images et des brochures concernant MiR100.
1.2. Historique du document
Le tableau ci-dessous présente les versions récentes et antérieures du présent document et
leurs interrelations avec les versions logicielles du produit.
Date de
Révision Description Logiciel Matériel
publication
1.0 27/11/2017 Première édition. 2.0 1.0
1.1 17/08/2018 Actualisation pour sortie de 2.2.0 et ver- 2.1
matériel informatique (hardware) sion ulté-
2.1 rieure
Mises à jour et améliorations tout
au long du manuel
1.2 04/01/2019 Actualisation pour sortie de 2.3.0 et ver- 3.0
matériel informatique (hardware) sion ulté-
3.0 rieure
Mises à jour et améliorations tout
au long du manuel
1.3 26/06/2019 Actualisation pour sortie de 2.6.0 et ver- 4.0
matériel informatique (hardware) sion ulté-
4.0 rieure
Mises à jour et améliorations tout
au long du manuel
MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 6
2. Sécurité
2. Sécurité
Consultez cette rubrique avant de mettre en route et d’utiliser MiR100.
Soyez particulièrement attentif(-ve) aux avertissements et consignes de sécurité.
AVERTISSEMENT
Mobile Industrial Robots décline toute responsabilité si MiR100 ou ses
accessoires sont endommagés, modifiés ou altérés de quelque façon que ce
soit. Mobile Industrial Robots ne pourra être tenue responsable de tout
dommage subi par MiR100, ses accessoires ou tout autre matériel en raison
d’erreurs de configuration ou d’un dysfonctionnement de MiR100.
2.1. Types de message de sécurité
Ce document applique les types de message de sécurité suivants.
MISE EN GARDE
Indique une situation potentiellement dangereuse pouvant entraîner la mort
ou de graves blessures.
• Prenez les mesures de précaution appropriées pour éviter tout dommage
ou toute blessure.
ATTENTION
Indique une situation potentiellement dangereuse pouvant entraîner des bles-
sures légères ou modérées. Signale les pratiques non sécuritaires.
• Prenez les mesures de précaution appropriées pour éviter tout dommage
ou toute blessure.
MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 7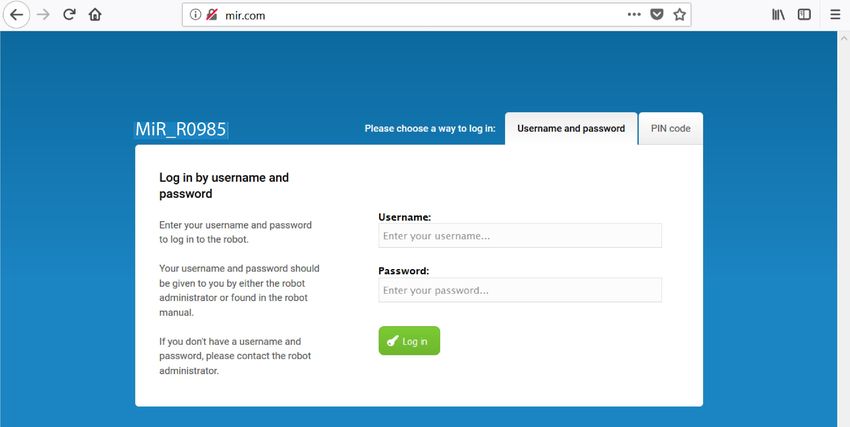
2. Sécurité
AVERTISSEMENT
Indique des informations importantes, y compris des situations pouvant entraî-
ner des dommages au niveau des équipements ou des biens.
2.2. Consignes de sécurité générales
Cette rubrique contient des consignes de sécurité générales.
MISE EN GARDE
Si la charge n’est pas positionnée ou fixée correctement sur le robot, elle peut
tomber ou le robot peut basculer.
• Assurez-vous que la charge est bien fixée et positionnée conformément aux
spécifications. Reportez-vous aux Spécifications relatives à la charge utile
sur la page53
MISE EN GARDE
L’utilisation d’un chargeur différent de celui fourni par le fabricant peut
entraîner un incendie.
• Utilisez exclusivement le chargeur d’origine.
ATTENTION
Le robot ne peut pas voir les escaliers en vue descendante, ni les trous au sol.
• Signalez les escaliers ou les trous sur les cartes en Zones interdites.
• Maintenez les cartes à jour.
MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 8
2. Sécurité
ATTENTION
En retirant le couvercle supérieur du robot, vous exposez les pièces raccordées
à l’alimentation.
• Débranchez le relais d’alimentation principal pour éviter un court-circuit.
Pour connaître l’emplacement du relais d’alimentation, reportez-vous à la
Présentation du produit sur la page30
ATTENTION
Activez le mode Avion lorsque vous contrôlez le robot depuis votre
smartphone. Risque de blessures corporelles et de dommages au niveau du
robot.
• Si vous contrôlez le robot depuis votre smartphone, assurez-vous que le télé-
phone est en mode Avion. Un appel entrant sur le smartphone interrompra
le contrôle du robot.
MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 9
2. Sécurité
MISE EN GARDE
Les blocs-batteries au lithium peuvent surchauffer, exploser ou s’enflammer,
provoquant des blessures graves en cas de mésusage électrique ou
mécanique.
Il convient de suivre les consignes suivantes pendant la manutention et
l’utilisation des batteries au lithium :
• Ne pas court-circuiter, recharger ou raccorder en inversant la polarité.
• Ne pas exposer à des températures supérieures à la plage de températures
indiquée. Ne pas incinérer la batterie.
• Ne pas écraser, perforer ou démonter la batterie. La batterie comporte des
dispositifs de protection et de sécurité qui, une fois endommagés, peuvent
entraîner la surchauffe, l’explosion ou la combustion de la batterie.
• Ne pas exposer la batterie à l’humidité.
• Dans l’éventualité d’une fuite au niveau de la batterie, le liquide peut
entrer en contact avec les yeux. Ne pas frotter les yeux en cas de contact.
Rincer abondamment avec de l’eau et consulter immédiatement un méde-
cin. Si la blessure n’est pas traitée, le liquide de la batterie peut entraîner
des lésions oculaires.
• Utiliser uniquement le chargeur d’origine (chargeur filaire ou borne de
recharge) et suivre systématiquement les consignes fournies par le fabri-
cant de la batterie.
2.3. Usage prévu
MiR100 est destiné à une mise en service et à un usage dans des environnements industriels
intérieurs, là où l’accès du public est limité. Pour en savoir plus sur les conditions
environnementales dans lesquelles le robot doit fonctionner, reportez-vous aux
spécifications techniques fournies sur notre site Web.
MiR100 doit être mis en service conformément aux consignes de la rubrique Mise en service
sur la page19 et préparé à l’environnement en fonction des directives. Il s’agit d’une
condition préalable pour utiliser MiR100 en toute sécurité.
MiR100 est conçu en tenant compte de tous les risques découlant d’une utilisation avec l’un
de ces modules supérieurs :
MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 102. Sécurité
• MiRHook 100 aux remorques tractées.
• Un module supérieur conçu sur mesure (avec charge utile) en vue de répondre aux exi-
gences suivantes :
- Ne doit pas augmenter les dimensions de MiR100 et doit satisfaire aux exigences énon-
cées dans la rubrique Spécifications relatives à la charge utile sur la page53.
- Ne doit pas posséder de pièces mobiles
MiR100 peut être utilisé en qualité de machine partiellement achevée comme le définit la
directive de l’UE sur les machines, avec des modules supérieurs qui ne répondent pas aux
restrictions précitées. Les personnes qui conçoivent, fabriquent ou mettent en service un
système qui ne répond pas aux restrictions d’utilisation de MiR100, s’acquittent des
obligations d’un fabricant et doivent garantir une conception sécuritaire conforme à la
norme EN ISO 12100. Les directives énoncées dans le présent manuel ne sont pas
suffisantes. Voici des exemples non exhaustifs de modules supérieurs qui ne relèvent pas de
l’usage prévu de MiR100 :
• Étagère sur pieds d’appui (avec ou sans roues)
• Modules supérieurs (avec charge utile) qui augmentent les dimensions de MiR100
• Bandes de transport (motorisées ou non)
• Bras de robot industriel
• Borne de transfert de charge sur mesure
2.4. Mauvaise utilisation prévisible
Toute utilisation ou application ne correspondant pas à l’usage prévu est considérée comme
une mauvaise utilisation. Cela comprend, sans s’y limiter :
• L’utilisation du robot pour transporter des personnes.
Risque de blessure.
• Des rampes à la pente prononcée sur le trajet.
Risque de blessure. Le nivellement prononcé (rampes, etc.) peut faire déraper le robot.
Consultez les spécifications techniques sur le site Web.
• Toute utilisation en extérieur.
Risque de blessure. MiR100 est conçu et prévu pour un usage intérieur exclusivement.
• La surcharge du robot.
Risque de blessure. En cas de dépassement de la charge utile maximale sur la partie supé-
rieure du robot, celui-ci peut basculer ou la charge peut être renversée. Consultez les spé-
cifications techniques sur le site Web.
• Remorquage d’un chariot non conforme aux spécifications techniques
MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 112. Sécurité • Tout manquement aux consignes de mise en service Consultez la rubrique Mise en service sur la page19 • L’absence d’évaluation des risques portant sur l’installation complète Consultez la rubrique Évaluation des risques en dessous. Cela s’applique au robot équipé de tout module supplémentaire. • Tout fonctionnement en dehors des spécifications environnementales et des para- mètres d’utilisation admissibles Risque d’instabilité, de collision ou de basculement. • Le transport de liquides ou d’aliments Risque d’instabilité. • Utilisation dans des environnements potentiellement explosifs 2.5. Évaluation des risques Pour garantir une installation sécuritaire, l'une des étapes cruciales consiste à réaliser une évaluation des risques. L'évaluation des risques incombe aux individus chargés de la mise en service du robot MiR100 dans l’environnement auquel il est destiné. La plupart du temps, il s’agit d'un intégrateur qui conçoit ou fabrique également les cellules de travail ou toute autre infrastructure requise avec MiR100. L’évaluation des risques doit porter non seulement sur MiR100 mais aussi tenir compte d’autres facteurs potentiels : les bornes de transfert de charge, les cellules de travail et l’environnement auquel le robot est destiné. Consultez l’analyse des risques MiR100 et MiR200 sur la page des distributeurs. Nous recommandons à l’intégrateur de s’appuyer sur les directives ISO 12100, EN 1525, ANSI B56.5 et toute autre norme pertinente dans le but de réaliser l’évaluation des risques. Cette évaluation des risques doit, au minimum, tenir compte des scénarios suivants : • La description détaillée de l’installation robotique. • Le fonctionnement normal de l’installation robotique. Vous pouvez vous appuyer sur l’article 4 de la norme EN 1525 qui fournit une liste des dangers importants et des situations/événements dangereux. Cette évaluation des risques doit être rédigée et sauvegardée dans le cadre du fichier technique. MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 12
2. Sécurité
2.6. Risques résiduels
Dans la liste ci-dessous, Mobile Industrial Robots a identifié les dangers potentiellement
graves dont l’intégrateur doit tenir compte.
• Être renversé, entraîné, piégé ou percuté si un individu se retrouve sur le trajet du robot
ou s’il marche en direction de MiR100 pendant la conduite en marche arrière. Le robot
MiR100 se déplacera en marche arrière uniquement pour se garer, saisir un chariot ou se
détacher d’un repère comme MiRCharge 24V.
• Écrasement ou prise au piège si l’utilisateur touche MiR100 . Merci de tenir compte des
avertissements fournis sur MiR100.
• Risque d’écrasement, d’entraînement ou de prise au piège au niveau des bornes de trans-
fert de charge, des cellules de travail ou des bornes de recharge.
AVERTISSEMENT
D’autres risques importants émergeront dans une installation robotique spé-
cifique et devront être identifiés pendant la phase de mise en service.
AVERTISSEMENT
Des risques résiduels persistent pour MiR100/MiR200.
2.7. Interfaces et fonctions de sécurité
Le robot MiR100 est équipé d'un éventail de fonctions de sécurité intégrées, mais aussi
d'interfaces électriques de sécurité visant à favoriser l’intégration avec un module supérieur
ou un manipulateur supérieur. Toutes les interfaces et fonctions de sécurité sont conçues en
conformité avec la norme ISO 13849-1.
Les interfaces et fonctions de sécurité sont sélectionnées pour garantir la conformité à la
norme EN 1525.
2.8. Limitations des fonctions de sécurité
Le robot MiR100 possède plusieurs fonctions de sécurité intégrées qui servent à garantir une
utilisation sécuritaire dans l’environnement auquel le robot est destiné.
MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 132. Sécurité Un logiciel de commande avancée garantit que les déplacements et le schéma de fonctionnement respectent les limites de sécurité. Cela permet d'éviter le déclenchement d'une fonction de sécurité. Les infractions à ces limites ne surviendront alors que dans des cas exceptionnels. Cependant, si une limite est enfreinte, le système de sécurité déclenche un arrêt de catégorie 0 (arrêt par « coupure immédiate de l’alimentation vers les actionneurs de la machine en vertu de la norme IEC 60204-1 ») suivi d’un freinage contrôlé entraînant l’arrêt de MiR100. Pour de plus amples informations, consultez les spécifications techniques sur notre site Web. Prévention des collisions La prévention des collisions est une fonction de sécurité qui permet d’arrêter le robot avant toute collision avec un être humain ou un objet. Cette fonction évalue la vitesse sur les deux roues motrices et modifie en conséquence les champs de protection prédéfinis. Plus la vitesse sera élevée, plus les champs de protection seront vastes. Cela garantit l’arrêt du robot si un être humain ou un objet est détecté au sein du champ de protection actif. La prévention des collisions est automatiquement désactivée deux secondes après l’évacuation du champ de protection. Prévention de la survitesse Le système de sécurité contrôle la vitesse de chaque moteur pour détecter tout dépassement de la vitesse maximale prévue. Il émet un avertissement en cas de perte de contrôle de la vitesse, indépendamment du motif. La fonction de sécurité relative à la prévention de la survitesse doit être désactivée manuellement. Pour ce faire, il suffit d’appuyer sur le bouton de redémarrage. Arrêt d’urgence MiR100 possède un dispositif d’arrêt d’urgence. L’arrêt d’urgence est uniquement destiné à un usage en cas d’urgence. Il ne doit pas servir d’arrêt fonctionnel. L’arrêt d’urgence doit être désactivé manuellement en actionnant le bouton de redémarrage. MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 14
2. Sécurité
2.9. Batterie au lithium
Cette rubrique contient des consignes de sécurité concernant les batteries au lithium des
robots MiR.
MISE EN GARDE
Les blocs-batteries au lithium peuvent surchauffer, exploser ou s’enflammer,
provoquant des blessures graves en cas de mésusage électrique ou
mécanique.
Il convient de suivre les consignes suivantes pendant la manutention et
l’utilisation des batteries au lithium :
• Ne pas court-circuiter, recharger ou raccorder en inversant la polarité.
• Ne pas exposer à des températures supérieures à la plage de températures
indiquée. Ne pas incinérer la batterie.
• Ne pas écraser, perforer ou démonter la batterie. La batterie comporte des
dispositifs de protection et de sécurité qui, une fois endommagés, peuvent
entraîner la surchauffe, l’explosion ou la combustion de la batterie.
• Ne pas exposer la batterie à l’humidité.
• Dans l’éventualité d’une fuite au niveau de la batterie, le liquide peut
entrer en contact avec les yeux. Ne pas frotter les yeux en cas de contact.
Rincer abondamment avec de l’eau et consulter immédiatement un méde-
cin. Si la blessure n’est pas traitée, le liquide de la batterie peut entraîner
des lésions oculaires.
• Utiliser uniquement le chargeur d’origine (chargeur filaire ou borne de
recharge) et suivre systématiquement les consignes fournies par le fabri-
cant de la batterie.
MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 153. Démarrage 3. Démarrage Cette rubrique décrit comment démarrer avec MiR100. 3.1. Dans la caisse Cette rubrique décrit le contenu de la caisse MiR100. La caisse contient : 1. Le robot MiR100 2. Le kit MiR100 • Boîtier d’arrêt d'urgence, antenne externe et 4 écrous M10x40 • Un câble de chargement • Un chargeur externe, 24 V CC, 10 A 3. Le dossier MiR100 contenant les documents papier et la clé USB. MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 16
3. Démarrage
4. Des documents papier :
• Démarrage rapide MiR100
• Nom d’utilisateur et mots de passe MiR
• Déclaration de conformité CE
5. Une clé USB contenant les documents suivants :
• Manuel d’utilisation MiR100
• Manuel de référence Interface Robot MiR 2.0
• Référence API REST robot MiR
• Nom d’utilisateur et mots de passe MiR
• Déclaration de conformité CE
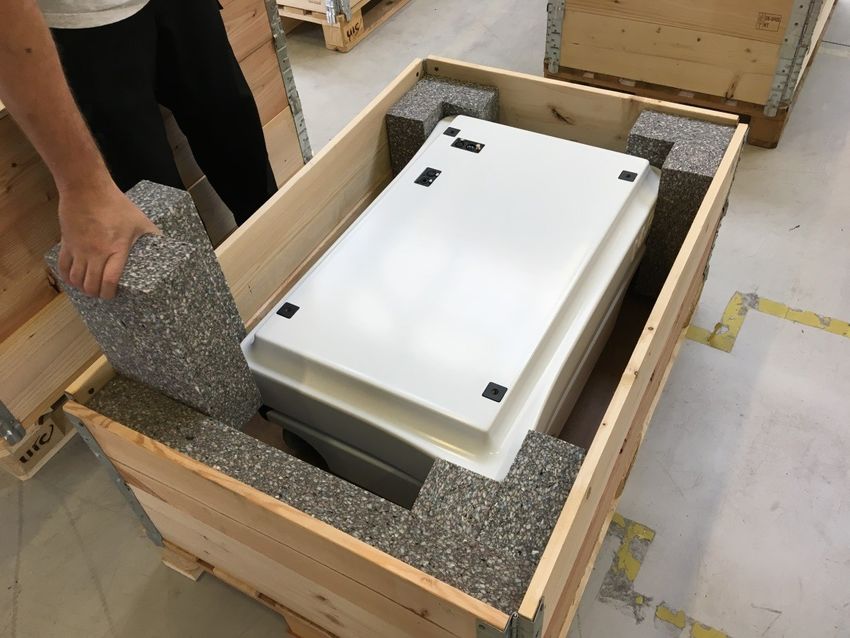
3.2. Déballage de la caisse MiR100
Cette rubrique décrit comment déballer la caisse MiR100.
Conservez l’emballage d’origine pour tout transport ultérieur du robot.
1. Retirez le couvercle en bois et sortez la boîte contenant le kit MiR100. Conservez
l’emballage d’origine pour tout transport ultérieur du robot.
MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 173. Démarrage 2. Enlevez la protection en mousse sur le haut et les blocs de mousse sur les côtés, puis démontez le cadre de palette. 3. Utilisez le couvercle en bois comme rampe à l’arrière du robot. MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 18
4. Mise en service
4. Mise en service
Cette rubrique décrit comment démarrer avec MiR100.
AVERTISSEMENT
Consultez le chapitre relatif à la sécurité avant la mise en route du robot.
4.1. Mise en route
Suivez les étapes suivantes pour mettre en route MiR100.
1. Placez vos mains sur les deux angles arrondis, puis enlevez délicatement le couvercle.
2. Branchez l'un des deux câbles de batterie sur la prise se trouvant en haut du boîtier de
batterie. Le deuxième câble est destiné à une batterie supplémentaire.
MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 194. Mise en service 3. Activez les trois relais se trouvant dans le coin, à côté du scanner laser frontal. Com- mencez par une alimentation secteur de 32 A (provenant du cadre extérieur vers l’intérieur). 4. Assurez-vous que le sectionneur de la batterie est activé (les deux témoins jaunes indiquent ON). MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 20
4. Mise en service
5. Remettez le couvercle en vous assurant qu’il est correctement placé par-dessus les ori-
fices des connecteurs.
6. Installez et connectez le boîtier d’arrêt d’urgence en haut du couvercle du robot.
Si un module supérieur doit être installé sur la partie supérieure du robot,
l’arrêt d’urgence doit être positionné de sorte à être facile d’accès. Con-
sultez la rubrique Installer un module supérieur sur la page51.
MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 214. Mise en service
7. Branchez l’antenne sur le connecteur disponible en haut du couvercle du robot. Enlevez
l’embout plastique du connecteur avant de fixer l’antenne.
Il est possible d’abaisser et de pivoter l’antenne dans toutes les directions
de sorte à l’insérer sous un module supérieur.
8. Appuyez sur le bouton bleu de l’alimentation dans le coin pour mettre le robot en
marche. Un témoin lumineux jaune s’allume brièvement sur le robot qui passe ensuite en
mode arrêt d’urgence indiqué par un témoin lumineux rouge constant.
MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 224. Mise en service
9. Appuyez sur le bouton de réinitialisation du boîtier d’arrêt d’urgence lorsqu’il s’allume.
Le témoin lumineux du robot affiche maintenant une lumière jaune constante, ce qui
indique que le robot est en pause et qu'il est prêt à fonctionner.
4.2. Connexion à l’interface robot
La mise en route du robot permet la connexion à son point d’accès WiFi. Le nom du point
d’accès figure sur la liste des connexions possibles sur votre PC, tablette ou téléphone.
AVERTISSEMENT
Le document relatif au nom d’utilisateur et aux mots de passe MiR contient le
nom d’utilisateur et le mot de passe pour le point d’accès WiFi du robot et
pour la connexion à l’interface Web. Le document se trouve dans la caisse
avec le robot.
Suivez les étapes suivantes pour vous connecter à l’interface robot :
1. Depuis votre PC, tablette ou téléphone, connectez le point d’accès WiFi du robot. Le nom
du point d’accès se présente sous la forme suivante : Mir_RXXXX.
MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 234. Mise en service
2. Dans un navigateur, rendez-vous sur la page mir.com et identifiez-vous.
Le robot est maintenant prêt à descendre le long de la rampe. Pour ce faire, passez en
mode manuel et utilisez le levier de commande électronique dans l’interface robot.
Consultez la rubrique suivante Utiliser le robot en Manual mode (Mode manuel) en
dessous.
4.3. Utiliser le robot en Manual mode (Mode manuel)
Pour utiliser le robot en Manual mode (Mode manuel) :
MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 244. Mise en service
1. Dans l’interface robot, sélectionnez l’icône du levier de commande. Puis appuyez sur
Manual control (Commande manuelle). Cela permet d’ouvrir la rubrique Joystick
control (Contrôle du levier de commande).
2. Le témoin lumineux de l’état du robot devient bleu, ce qui indique que le robot est en
Manual mode (Mode manuel).
3. Déplacez le robot à l’aide du levier de commande.
Nous vous conseillons de faire descendre le robot en marche arrière.
MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 254. Mise en service 4.4. Vérification de l’état du matériel Pour vérifier que tous les composants du matériel fonctionnent comme prévu : Connectez-vous à l’interface robot. Consultez la rubrique Connexion à l’interface robot sur la page23 Suivez le chemin suivant : Monitoring (Contrôle) > Hardware health (Santé du matériel). Vérifiez que tous les éléments sur la page s’accompagnent de la mention OK et d’un point vert sur la gauche. Pour en savoir plus, consultez la rubrique Hardware health (Santé du matériel) dans le manuel de référence Interface Robot MiR 2.0. 4.5. La charge du robot Le robot est fourni avec une batterie chargée. Il peut fonctionner pendant trois heures avant la prochaine recharge. Suivez les étapes suivantes pour charger le robot en utilisant le câble de chargement inclus : MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 26
4. Mise en service
1. Retirez le cache angle arrière en le tirant vers vous. Vous devrez peut-être exercer une
légère pression les deux premières fois.
Pour éviter une décharge rapide et une diminution de la batterie, nous
vous conseillons de mettre le robot hors tension pendant la recharge avec
un câble.
Si vous rechargez deux robots d’affilée avec un câble, attendez environ une
minute entre le moment où vous débranchez le premier robot et le
moment où vous branchez le second. Cela permettra au chargeur de com-
prendre qu’un nouveau robot est en cours de recharge.
MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 274. Mise en service
2. Branchez le chargeur sur la prise de chargement du robot et sur une prise de courant.
Activez l’interrupteur à bascule sur le robot pour lancer la charge.
Utilisez exclusivement le câble de chargement d’origine.
3. Au bout de quatre heures et demi maximum, le robot est parfaitement chargé.
4. Désactivez l’interrupteur à bascule et débranchez le câble de chargement du robot.
Replacez le cache angle.
Le robot détecte à la fois le câble et le bouton de chargement activé. Il se
mettra en mode arrêt d’urgence dans les deux cas.
Pour obtenir plus d’informations sur le temps de charge, reportez-vous aux spécifications du
robot sur www.mir-robots.com.
MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 284. Mise en service 4.6. Mise hors tension du robot Pour mettre hors tension : 1. Assurez-vous que le robot ne se déplace pas et qu'il n’exécute aucune action. 2. Appuyez sur le bouton On/Off (Marche/Arrêt). 3. Le robot lance le processus de mise hors tension. Lors de la mise hors tension, les témoins lumineux de l’état prennent une teinte jaune déclinante. 4. Le processus de mise hors tension est terminé quand les témoins lumineux de l’état s’éteignent. Si vous arrêtez le robot à des fins de transport ou d’entretien/de réparation, le sectionneur de la batterie doit aussi être désactivé et le câble de batterie débranché. MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 29
5. Présentation du produit 5. Présentation du produit MiR100 est un robot mobile autonome capable de transporter des charges jusqu’à 100 kg et des palettes. Il est destiné à un usage intérieur dans des installations de production, des entrepôts et d’autres sites industriels. Les utilisateurs font fonctionner MiR100 par l’intermédiaire d’une interface utilisateur Web accessible via un navigateur sur PC, smartphone ou tablette. Chaque robot est doté de son propre réseau. Consultez la rubrique Connexion à l’interface robot sur la page23. Le robot peut être configuré de sorte à parcourir un trajet fixe. Il peut être sollicité à la demande ou amené à exécuter des opérations plus complexes (missions). Le robot effectue les opérations de localisation et de navigation grâce à une carte qui peut être créée ou importée lors de la première utilisation du robot. La carte interne comporte des emplacements définis (bureau, livraison de produit, hall de production, etc.) qui servent à des fins de planification logistique. En cours de fonctionnement, les scanners laser de sécurité permettent au robot d’éviter les obstacles dynamiques (personnes, mobilier) qui ne sont pas cartographiés. Avec un MiRCharge 24V, le robot peut se déplacer automatiquement vers une borne de recharge. Il suffit de définir une mission de recharge et une position de recharge sur la carte. 5.1. Caractéristiques principales de MiR100 Voici les caractéristiques principales de MiR100 : • Se déplacer dans un espace de travail en présence d’individus Le robot est conçu pour fonctionner en présence d’individus, mais aussi pour se déplacer en toute sécurité et efficacement, même dans des environnements hautement dyna- miques. • Planification globale des trajets et ajustements locaux Le robot fonctionne de manière autonome et définit le trajet le plus efficace vers ses des- tinations. Le robot ajuste le trajet quand il rencontre des obstacles qui ne figurent pas sur la carte (comme des personnes et des objets). • Transport efficace de charges lourdes Le robot est conçu pour automatiser le transport de charges jusqu’à 100 kg, tous secteurs d’activités confondus, ce qui permet aux salariés de se concentrer sur des activités à plus forte valeur ajoutée. MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 30
5. Présentation du produit
• Signaux lumineux et sonores
Le robot émet en permanence des signaux lumineux et sonores indiquant son mode
actuel, par exemple en attente d’une tâche, déplacement en cours vers la destination, des-
tination atteinte ou mode alerte.
• Souplesse et facilité d’utilisation
Programmable sans expérience préalable, l’interface utilisateur Web accessible via PC,
smartphone ou tablette permet d’accéder facilement au fonctionnement et au contrôle
du robot. Il est possible de configurer différents niveaux pour les groupes d’utilisateurs et
des tableaux de bord personnalisés pour répondre aux besoins des différents utilisateurs.
• Alerte « égarement »
Si le robot se retrouve dans une situation où il ne parvient pas à trouver un trajet vers sa
destination, il s’arrête et émet un signal lumineux d’erreur jaune-violet. Une action Catch
(attraper) définie par le client peut servir à alerter les personnes ou à prendre d’autres
mesures.
• Décélération automatique pour les objets
Les capteurs intégrés permettent au robot de ralentir quand des obstacles sont détectés
devant lui.
• Opérations de surface optimales
Le robot est conçu pour fonctionner au sol, sur une surface plane et sèche. Les caméras
3D détectent et évitent les objets.
• Carte interne
Le robot peut utiliser un plan du sol à partir d’un système CAO. Autrement, une carte peut
être créée en navigant manuellement tout autour du site où le robot sera amené à fonc-
tionner. Pendant la cartographie, les capteurs du robot détectent les murs, les portes et le
mobilier pour créer ensuite une carte sur la base de ces données entrantes. Une fois la
carte générée, les positions et d’autres caractéristiques peuvent être ajoutées dans
l’éditeur de carte.
Modules complémentaires
Les modules complémentaires suivants sont disponibles pour MiR100 :
• MiRHook 100
Un crochet peut être installé sur MiR100 afin de permettre l’automatisation du transport
interne des chariots.
Pour en savoir plus sur les modules complémentaires, rendez-vous sur www.-
mir-robots.com.
MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 315. Présentation du produit
5.2. Étiquette d’identification
L’étiquette d’identification de se trouve à l’arrière du boîtier de batterie.
CE Mobile Industrial Robots A/S déclare que MiR100 satisfait aux
exigences des directives CE applicables.
Numéro de Le numéro de série composé de 15 chiffres représente
série l’identifiant unique du robot. Les quatre derniers chiffres font
partie du nom d’origine du robot, par ex. : MiR R635.
MiR100 4.0 Nom du produit et version hardware.
Exemple de marquage CE MiR100 et d’étiquette d’identification.
5.3. Pièces externes de MiR100
Cette rubrique présente les pièces de MiR100 qui sont visibles depuis l’extérieur.
MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 325. Présentation du produit
1. Couvercle supérieur 11. Derrière le cache angle arrière
amovible : Port de charge avec
commutateur
2. Roue pivotante – les roulettes aux 12. Capteurs à ultrasons pour détec-
quatre coins ter les objets transparents
(arrière)
3. Roue motrice — commande 13. Cache arrière
différentielle
4. Derrière le cache angle 14. Scanner laser arrière
amovible : Port HDMI et « port de
service » USB — connexion au PC
du robot
5. Bouton de réinitialisation du 15. Trou d’ancrage — un dans chaque
scanner (jaune) et bouton On/Off coin pour fixer les modules
(bleu) supérieurs
6. Capteurs à ultrasons pour 16. Raccordement Ethernet RJ45
détecter les objets transparents
(côté)
7. Caméras de profondeur 3D 17. Interface d’application — pour la
connexion au matériel comme le
crochet, consultez la rubrique
Spécifications relatives à
l’interface sur la page56
8. Connecteurs de plaquettes — pour 18. Prise de l’antenne
la connexion aux pôles de charge
sur la borne de recharge
MiRCharge 24V
9. Scanner laser frontal 19. Port USB « port de service » —
connexion au PC du robot
MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 335. Présentation du produit
10. Cache latéral 20. Interface Arrêt d’urgence avec
options supplémentaires pour
raccorder de petites unités et
l’entrée I5 sur scanners SICK —
consultez la rubrique
Spécifications relatives à
l’interface sur la page56
Pièces externes de MiR100.
5.4. Pièces internes de MiR100
Cette rubrique présente les pièces de MiR100 qui sont visibles à l’intérieur.
1. Disjoncteur — fusible 10. PLC de sécurité SICK
automatique entre la batterie et
les composants
MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 345. Présentation du produit
2. Relais de coupure de courant du 11. Optocoupleur — signal d’arrêt
robot — libère le relais à d’urgence à la commande de
enclenchement (pos. 16) quand le moteur
robot est en cours de mise hors
tension.
3. Commande de moteur — gère les 12. Haut-parleur
deux entraînements du moteur
4. Relais de freins — permet de 13. Carte MiR — carte d’interface
court-circuiter les enroulements pour le gyroscope,
du moteur pour accélérer le l’accéléromètre, les capteurs à
freinage ultrasons, les témoins lumineux, le
circuit On/Off et la
communication par bus CAN
5. Connecteur de batterie pour 14. Alimentation 24 V — assure une
batterie supplémentaire tension stable pour le PC et le PLC
6. Relais d’absence sûre du couple 15. Relais à enclenchement — active
(contrôlé par SICK) l’alimentation 24 V permettant
d’allumer le robot
7. Connexion par bus CAN pour le 16. Protection contre les surtensions
système de gestion de batterie — protège l’alimentation des
(BMS), l’enregistrement de circuits en absorbant les pics de
données comme le nombre de tension émanant de la batterie ou
cycles de charge. Consultez le des modules supérieurs
Manuel de référence Interface
Robot MiR 2.0.
8. Routeur — réseau local, 2,4 et 17. Ordinateur DFI
5 GHz
9. Batterie avec connecteur —
alimentation principale vers le
robot
Pièces internes de MiR100.
MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 355. Présentation du produit 5.5. Système de capteurs La collaboration entre les capteurs internes et externes du robot permet à celui-ci de se déplacer dans l’environnement et, fait plus important, cela garantit son fonctionnement en toute sécurité parmi les personnes et les objets comme le mobilier, les machines, les palettes, etc. Cette rubrique décrit la fonctionnalité des différentes pièces du système de capteurs. Scanners laser de sécurité Les scanners laser de sécurité sur MiR100 sont de type SICK S300. Dans ce manuel, le terme utilisé est scanner laser de sécurité. Fonctions du scanner Deux scanners laser de sécurité, positionnés en diagonale au niveau des coins avant et arrière du robot, balayent l’environnement alentour. Chaque scanner laser de sécurité possède un champ de vision à 360° jusqu’à 1 mètre autour du robot, ce qui fournit une protection visuelle complète autour du robot. Les scanners laser de sécurité servent trois objectifs : • Ils sont utilisés à des fins de cartographie — consultez également le Manuel de référence Interface Robot MiR 2.0. • Ils servent à localiser le robot dans l’environnement, mais aussi à planifier les trajets entre chaque point. • Ils scannent en permanence l’environnement alentour pendant le fonctionnement du robot, ce qui permet d’éviter les collisions avec des objets et des personnes. Les scanners laser de sécurité détectent les objets sur un plan à environ 200 mm au-dessus du sol. Les objets se trouvant au-dessus ou en dessous ne sont pas détectés par les scanners laser de sécurité. En mouvement, les scanners laser de sécurité balayent en permanence l’environnement alentour en appliquant une distance jusqu’à 2,5 m. MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 36
5. Présentation du produit Pendant la cartographie, la vision du scanner laser de sécurité est réduite à 20 m pour assurer la plus haute qualité possible des cartes. Les scanners laser de sécurité voient jusqu’à 20 m pendant la cartographie de la zone. Les signaux émanant des scanners laser de sécurité sont combinés aux données entrantes des caméras 3D et des capteurs de proximité afin d’évaluer si un objet ou une personne se trouve sur le trajet de déplacement. Dans ce cas, le robot ralentit progressivement tout en essayant d’éviter l’obstacle. S’il ne peut pas contourner l’obstacle, le robot s’arrête et attend que la voie soit dégagée. Les champs de protection Les champs de protection font partie intégrante des moyens de détection du personnel du robot. Les champs de protection prennent la forme de contours configurés individuellement autour du robot. MiR100 active le champ adapté en fonction de la vitesse. La présence d’une personne ou d’un objet dans un champ de protection actif entraînera l’arrêt de protection du robot. Celui-ci ne reprendra pas son trajet tant que le champ de protection ne sera pas dégagé. Les tableaux suivants montrent les dimensions des champs de protection selon des vitesses données. Plus le robot se déplace rapidement, plus le champ des scanners s’étend. Les champs de protection varient en fonction de la conduite en marche avant et de la conduite en marche arrière. Champs de protection en cas de conduite en marche avant Le tableau ci-dessous montre les vitesses et les champs de protection en cas de conduite en marche avant. Le tableau précise la longueur du champ à l’avant du robot dans différents MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 37
5. Présentation du produit
cas. Chaque cas est défini par un intervalle de vitesse susceptible d’être utilisé par le robot.
Les couleurs et les cas du tableau correspondent au champ fourni dans l’illustration ci-
dessous.
Cas Vitesse Champ à l’avant du robot Remarques
1 -1,40 à 0,20 m/s 20 mm Inversion et lente marche avant
2 0,21 à 0,40 m/s 120 mm
3 0,41 à 0,80 m/s 290 mm
4 0,81 à 1,10 m/s 430 mm
5 1,11 à 2,00 m/s 720 mm Marche avant à vitesse maximale
L’illustration montre les contours du champ pour la conduite en marche avant. La portée du
champ varie en fonction de la vitesse du robot. Dans le cas 1, le champ atteint 20 mm à
l’avant. Dans le cas 2, il atteint 120 mm à l’avant, et ainsi de suite.
MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 385. Présentation du produit
Champs de protection en cas de conduite en marche arrière
Le tableau ci-dessous montre les vitesses et les champs de protection en cas de conduite en
marche arrière. Les couleurs correspondent au champ fourni dans l’illustration ci-dessous.
Cas Vitesse Champ Remarques
1 -1,14 à 1,80 m/s 30 mm Inversion et lente marche arrière
2 -0,20 à 0,15 m/s 120 mm
3 0,40 à 0,21 m/s 290 mm
4 -1,50 à 0,41 m/s 430 mm Marche arrière à vitesse maximale
L’illustration montre les contours du champ en marche arrière. La portée du champ varie en
fonction de la vitesse du robot. L’illustration montre également comment le scanner frontal
réduit son champ de protection jusqu’à atteindre un seuil minimal quand le robot se déplace
en marche arrière.
MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 395. Présentation du produit
AVERTISSEMENT
Tolérances des champs de protection
Les scanners mesurent les distances par rapport aux réflexions diffuses.
Autrement dit, on ajoute une tolérance aux champs de protection pour
garantir une détection efficace des personnes qui traversent les champs de
protection. La distance de tolérance est fixée à 100 mm.
ATTENTION
Les champs de protection sont configurés de sorte à respecter les normes de
sécurité de MiR100.
En cas de modification, Mobile Industrial Robots décline toute responsabilité
quant à tout incident lié à la sécurité, et la garantie ne s’applique plus.
Caméras 3D
Deux caméras de profondeur 3D sont positionnées à l’avant du robot pour détecter les objets
se trouvant à l’avant de celui-ci tandis que le planificateur local du robot ajuste en continu
ses trajets prévus autour desdits objets.
Les caméras 3D détectent les objets :
• En position verticale jusqu’à 1 800 mm à une distance de 1 950 mm à l’avant du robot.
• En position horizontale à 180 mm de la première vue du sol.
Les caméras 3D ne détectent pas les objets se trouvant à 50 mm des objectifs.
On ne tient pas compte du périmètre partant du sol jusqu’à 50 mm à la verticale. Ce
périmètre augmente de 10 mm tous les un mètre à l’horizontal.
Les résultats de la caméra sont utilisés comme des données de nuages de
points 3D. Les caméras n’enregistrent pas les objets ou les personnes recon-
naissables.
Les illustrations suivantes montrent le champ de vision des caméras.
MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 405. Présentation du produit Les deux caméras 3D peuvent voir des objets jusqu’à une hauteur de 1 800 mm au-dessus du sol. MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 41
5. Présentation du produit Les deux caméras 3D ont un champ de vision horizontal de 118°. Capteurs à ultrasons Le robot est équipé de quatre capteurs à ultrasons : deux à l’avant et deux à l’arrière. Les capteurs à ultrasons servent à détecter les objets transparents. Capteurs internes Le système de capteurs internes du robot comprend les éléments suivants : • Gyroscope (unité inertielle) Mesure l’orientation et la vitesse angulaire du robot. • Codeur du moteur Fournit des signaux de rétroaction en circuit fermé en contrôlant la vitesse et/ou la posi- tion de l’arbre du moteur. • Accéléromètre Mesure l’accélération non gravitationnelle. MiR100 Manuel d’utilisation (fr) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 42
Vous pouvez aussi lire