Vision for Your Automation - Interempresas
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
Systèmes de vision 3D Vision for Your Automation

Vision for Your Automation
Expérience et innovation…
2003 Depuis maintenant presque 30 ans, VISIO NERF
Guidage de robot en 3D conçoit et construit des systèmes de traitement
pour ébavurage
de grandes pièces brutes. d’images pour le contrôle qualité et le pilotage de
robot par caméras de toute production industrielle.
2006 Avec plusieurs milliers de systèmes installés à travers
Guidage de robot en 3D le monde et dans tous les secteurs de l’industrie,
pour dévracage de Visio Nerf possède une expérience incomparable
vilebrequins. pour être considéré aujourd’hui comme un leader
dans le domaine de la vision industrielle.
2009 Grâce à ses développements novateurs dans la
Gamme complète
conception de ses capteurs et de ses logiciels,
de logiciels d’analyse
de nuages de points 3D, la société VISIO NERF SA est devenue un acteur
avec apprentissage par incontournable pour répondre aux exigences clients
le fichier CAO des pièces. de plus en plus fortes.
2012
Guidage de robot en 3D
pour dévracage
de maillons (Caterpillar). Précisément, au bon endroit Au-delà des limites
VISIO NERF a réalisé depuis plus de 15 ans de de la vision...
2014 nombreuses installations de vision 3D, pour des
VISIO NERF a développé autour de son offre des outils
Sommaire
Lancement de la gamme applications de contrôle qualité ou de guidage
simples de mise en œuvre et d’une grande efficacité
de capteurs cirrus 3D . de robots. Fort de cette expérience, VISIO NERF
pour la localisation des pièces et le contrôle qualité
vous présente sa gamme de systèmes de vision 3D
2015
au plus près de la production.
appelés cirrus 3D. Le cirrus 3D est un système de vision
3D complet intégré en un seul boîtier prêt à l’emploi,
Cirrus3D________________________ 4-7
Guidage de robot en 3D Grâce à nos différentes technologies d’acquisition,
pour la pose de pare-brise incluant le logiciel eyesberg 3D. Votre projet sera nous vous apportons des solutions robustes qui
Cirrus3D Convoyeur______________ 8-9
avec cirrus 3D . plus efficace et plus performant avec une vision 3D prennent en compte votre besoin mais également les
qu’avec une vision 2D. contraintes liées à l’environnement de votre process
Sensor Manager______________ 10-11
2016 N’hésitez plus ! comme les variations de teinte ou de couleur des
Renault adopte le cirrus 3D pièces et/ou les variations de luminosité à l’intérieur Eyesberg3D___________________ 12-13
et eyesberg 3D pour sa de l’usine, ainsi que les variations de dimension et de
production. forme des pièces brutes. Applications
2017
Nos capteurs de vision sont développés pour être
Localisation___________________ 14-15
robustes aux conditions de travail industrielles avec
Inspection de pièces les poussières ambiantes ainsi que les projections de
de fonderie. Inspection____________________ 16-17
fluides des machines environnantes.
2018 Guidage robot_________________ 18-19
Lancement de la gamme Dévracage____________________ 20-21
cirrus 3D Convoyeur.
Identification__________________ 22-23
Vision for Your Automation
Capteur autonome
Connecteurs industriels étanches
”Plug & Work”
Avec le nouveau capteur 3D de V ISIO NERF, (Alimentation et entrées/sorties, Sortie
vidéo numérique, Ethernet RJ45, USB)
l’intégration à votre process industriel est simplifiée.
cirrus 3D est tout spécialement conçu pour intégrer
le cœur de votre installation sans développement
Refroidissement
spécifique. garantissant un indice
Scan ultra rapide : de protection élevé
Utilisé comme composant fixe ou mobile, équipé Mini 0,2 seconde
ou non du logiciel de traitement d’image eyesberg 3D *
(technologie brevetée), cirrus 3D permet la mise
en œuvre d’applications vision/robotique d’une
efficacité incomparable et de très haute qualité.
4 Dédiés à un usage industriel, ces scanners sont peu sensibles à 5
l’environnement, aux poussières et aux variations de luminosité
et ceci afin de garantir une fiabilité et une robustesse de vos
Processeur intégré
installations sans équivalent (IP 65). à haute performance
pour le calcul des points 3D
Assemblage, inspection, identification, localisation de pièces
unitaires ou en vrac sont des applications industrielles dans
Indice de protection
lesquelles la gamme cirrus 3D vous apportera un excellent retour élevé (IP 65)
sur investissement.
LED Bleue
Caméra 4 MP
Des composants ”made in” VISIO NERF
Connectique industrielle étanche Projecteur puissant couplé à une LED bleue Refroidissement haute per formance Processeur intégré ultra puissant Capteurs CMOS et objectifs spécialement
pour le calcul des points 3D conçus pour une haute résolution
* eyesberg3D : localisation intelligente grâce aux modèles CAO
Vision for Your Automation
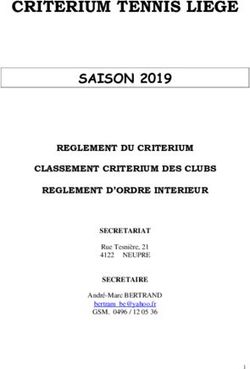
cirrus 3D en quelques mots Avantages Application multi-capteurs
•G
amme de scanners haut de gamme • R entable rapidement. Nous avons prévu la possibilité de connecter plusieurs
pour une utilisation industrielle. • H aute immunité à la lumière ambiante. capteurs entre eux. Dans cette configuration, l’intelligence
• Produits ”Plug & Work” calibrés en usine • Problématique de sécurité limitée (le laser est remplacé est intégrée dans un seul capteur dit ”Maître”. Un seul
et autonomes (calculateur intégré). par une technologie éprouvée, la LED). logiciel suffit pour piloter jusqu’à 9 capteurs dits ”Esclaves”. MAÎTRE ESCLAVE 1 ESCLAVE 2 (…9)
• I mages haute résolution. • I ntégration facile à l’intérieur d’un process industriel
• S can ultra rapide : à partir de 0,2 seconde robotisé ou non.
Ethernet
pour 1 million de points 3D. • S implicité de la mise en œuvre des protocoles
• C omparaison d’un nuage de points de communication ( TCP/IP). Digital Digital Digital
I/O I/O I/O
à un fichier CAO (option). • S implicité de paramétrage de l’ensemble de Display
• S ystème de vision 3D pour applications l’application de vision 3D eyesberg 3D (option).
robotiques ou non (dévracage, localisation, • Paramétrable et programmable par interface graphique 24V Power 24V Power 24V Power
USB Supply Supply Supply
identification et inspection...). déportée via réseau ou directe via écran/souris.
• É clairage à lumière structurée (LED Bleue). 90…260 V AC 90…260 V AC 90…260 V AC
• R efroidissement par eau possible (option).
Configuration 2 Cirrus (Maître/Esclave)
6 capteurs - 6 volumes de travail
6 7
Modèle Cirrus3D Cirrus 150 Cirrus 300 Cirrus 600 Cirrus 800 Cirrus 1200 Cirrus 1600 Caractéristiques communes à tous les modèles
Volume de vision en mm (L x P x H) 150 x 150 x 60 300 x 300 x 150 600 x 500 x 300 800 x 600 x 500 1200 x 1000 x 1000 1600 x 1200 x 1200 Vitesse de scanning À partir de 0,2 s Matière du boîtier Aluminium anodisé
Alimentation et entrées/sorties,
Distance de travail mini en mm 300 450 950 1250 1900 2500
Nombre de points 3D Jusqu’à 4 millions Connecteurs Sortie vidéo numérique, Ethernet
Résolution* de l’image 3D en mm (Z) 0,1* 0,2* 0,45* 0,9* 1,5* 1,8* RJ45, USB
Logiciel de traitement de
Résolution des capteurs CMOS 4 Mp 4 Mp 4 Mp 4 Mp 4 Mp 4 Mp eyesberg3D Alimentation 24 V CC 8 A max
l’information (option)
Dim. du capteur en mm (L x P x H) 312 x 100 x 210 312 x 100 x 210 412 x 100 x 210 412 x 100 x 210 612 x 100 x 210 812 x 100 x 210 Calibration Pré-calibré en usine Source de lumière LED
Interface de communication Ethernet Température d’utilisation 0°C…50°C
Poids du capteur (Kg) 6 6 7 7 8 10
Entrées/sorties digitales 24 V CC 4 entrées 3 sorties
* Pour un seul point 3D sans moyennage ni interpolation au plus loin du capteur.
La localisation pièce est jusqu’à 10 fois meilleure que la résolution mais dépend des écarts entre le fichier CAO et la pièce réelle.
Cirrus 150 Cirrus 300 Cirrus 600 Cirrus 800 Cirrus 1200 Cirrus 1600
300 mm
2.500 mm
450 mm
1.900 mm
950 mm
1.250 mm
max. 150 x 150 x 60 mm
max. 300 x 300 x 150 mm
max. 600 x 500 x 300 mm
max. 800 x 600 x 500 mm
max. 1.200 x 1.000 x 1.000 mm max. 1.600 x 1.200 x 1.200 mm
Ces informations peuvent être modifiées sans avis préalable.
Vision for Your Automation
convoyeur
Avantages Caractéristiques du capteur
Prise de pièce en tracking sur un convoyeur
> Rapide Connexions : Alimentation / Ethernet / Écran / USB.
> Facilité de calibration du système Paramétrage : interface de paramétrage d’acquisition
intuitive et facile d’utilisation.
en quelques minutes
Visualisation du nuage de points 3D.
> Précision : jusqu’à 0,5 mm
Calibration en quelques minutes avec détermniation
> Largeur de travail jusqu’à 1600 mm automatique de la résolution codeur et de la position
> C ompatibilité avec toutes les marques exacte du capteur par rapport au convoyeur.
majeures de robot Entrées pour phases A et B codeur incrémental 24V.
Résolution codeur supérieure à la résolution d’acquisition
> Flexibilité du système
des lignes 3D pour une plus grande précision.
> Capteur économique : tout en un Détermination automatique de la résolution codeur lors de
> Pièces mates et brillantes ; pièces brutes la phase de calibration. Et la calibration permet de mesurer
et compenser la position exacte du cirrus 3D par rapport au
8 convoyeur ; donc la position du cirrus 3D lors de l’installation 9
n’est pas critique.
Détection automatique des pièces et filtrage des intrus.
Scène réelle Envoi d’un signal de synchronisation au robot par sortie 24V
puis des coordonnées de la pièce par TCP/IP.
Ce signal de synchronisation se connecte en lieu et place
de la cellule de détection de pièce utilisée classiquement
par les robots pour les applications en tracking.
cirrus3D convoyeur cirrus3D convoyeur 500 cirrus3D convoyeur 1000 cirrus3D convoyeur 1500
Largeur convoyeur 550 Largeur convoyeur 1050 Largeur convoyeur 1500
Volume de travail (mm)
Nuage de points 3D Hauteur max pièces 300 Hauteur max pièces 400 Hauteur max pièces 500
800 / dessus des pièces 1500 /dessus des pièces 2200 /dessus des pièces
Distance de travail (mm)
1100 max / convoyeur 1900 max / convoyeur 2700 max / convoyeur
Vitesse de scan Max. 3000 profils de 2048 points 3D / seconde*
Résolution 0.5 mm 1 mm 1 mm
Éclairage LASER classe 2M ou 3R
IP 65
Localisation des pièces Dimensions du capteur (mm)
412 x 100 x 210 612 x 100 x 210 812 x 100 x 210
LxPxH
Poids du capteur (kg) 7 8 10
Compatibilité Robot Toutes les marques majeures
*Vitesse typique de 200 profils de 2000 points 3D/seconde pour la pleine hauteur de scan.
Autres modèles disponibles sur demande - Customisation possible
Vision for Your Automation
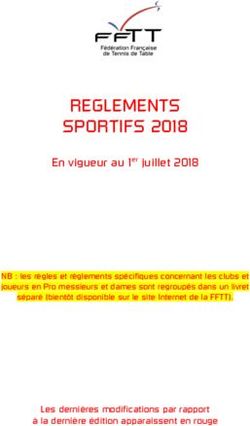
SENSOR MANAGER
Une inter face de paramétrage simple et intuitive Précision et qualité des points 3D quelle que soit la position en hauteur
pour des nuages de points de haute qualité. des pièces dans le volume de travail.
Haut de benne
10 11
Nuage Zoom nuage
de points 3D de points 3D
Image réelle
Haute dynamique du capteur pour numériser des scènes de travail Fond de benne
avec des pièces mates, brillantes et multi-matériaux.
Nuage Zoom nuage
de points 3D de points 3D
Pièce réelle Image réelle
Nuage de points 3D
Vision for Your Automation
5 applications majeures
Système de vision 3D VISIO NERF vous propose une gamme de solutions appelée
eyesberg 3D, reposant sur une technologie à la fois éprouvée
conçu pour traiter
et robuste.
toute forme géométrique de pièce
Le principe de base consiste à associer en temps-réel un
sans programmation spécifique. nuage de points 3D acquis par le capteur 3D avec le modèle
CAO de la pièce. Une petite portion de la pièce, comme la
Localisation
partie visible d’un iceberg, suffit au logiciel pour identifier et (p.14)
localiser la pièce dans la scène de travail.
Nous proposons à nos clients un programme générique et
ouvert qu’il suffit simplement de compléter en important le
fichier CAO de la pièce.
Différents modules peuvent être combinés ensemble sur
un même capteur cirrus 3D (par exemple identification/
guidage, identification/inspection) afin de répondre à des
12 problématiques complexes avec des outils standards. 13
Ces solutions sont recherchées et attendues dans une
multitude de secteurs industriels (aéronautique, automobile, Inspection
ferroviaire…) depuis de nombreuses années car elles (p.16)
permettent des gains de productivité et la maîtrise de la
qualité (eyesberg 3D Inspection).
Identification
(p.22)
Guidage robot
(p.18)
Dévracage
(p.20)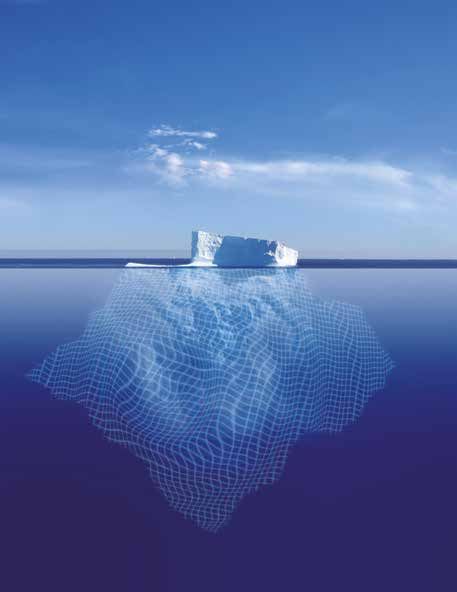
Vision for Your Automation
Localisation Exemples d’applications
Pour automatiser au meilleur coût
le chargement d’une ligne de production.
Du réel au virtuel
La scène de travail réelle est numérisée sous la forme
d’un nuage de points 3D.
14 15
Pièce réelle brute
Modèle CAO 3D
Nuage de points
Du virtuel au réel
L’analyse de la scène de travail virtuelle par comparaison du
nuage de points avec le modèle CAO (en jaune sur l’illustration)
permet de localiser la pièce réelle (points verts) au sein du
nuage de points acquis sur la pièce brute (points gris).
Si besoin, le module de gestion de collision vérifie que le
préhenseur peut saisir la pièce dont le robot reçoit la position
en temps réel.
Vision for Your Automation
Inspection Exemples d’applications
Pour inspecter en ligne la conformité
des pièces de votre production au meilleur coût. Pièces moteur
Vilebrequin
Du réel au virtuel Pièce réelle
La scène de travail réelle est numérisée
sous la forme d’un nuage de points 3D.
Modèle CAO 3D
16 17
Nuage de points
Du virtuel au réel
Pièces de
L’analyse des mesures de la pièce permet de faire
transmission
un contrôle surfacique exhaustif.
La comparaison du nuage de points avec le modèle
CAO permet de faire une analyse surfacique de la pièce
et de contrôler un ou plusieurs critères de conformité :
manque matière, surplus matière, dimensions,
planéité…
Pièces
La ligne de production reçoit en temps réel
de freinage
l’information de conformité de la pièce afin d’assurer
une qualité optimale.
Noyau
Vision for Your Automation
Guidage robot Exemples d’applications
Pour automatiser au meilleur coût le parachèvement
ou l’usinage de pièces mécaniques.
Du réel au virtuel
La scène de travail réelle est numérisée
sous la forme d’un nuage de points 3D.
Scène réelle
18 Modèle CAO 19
de la pièce
Nuage de points
Pour automatiser au meilleur coût les lignes d’assemblage.
Pièces intérieures Pare-brise
de véhicule de véhicule
Pose de roue
Pose de
pare-brise
Du virtuel au réel
L’analyse de la scène de travail virtuelle permet La cellule d’usinage reçoit les corrections de trajectoire
d’optimiser le processus. afin que l’outil suive au mieux la peau de la pièce.
L’association du nuage de points avec le modèle CAO
de la pièce permet de compenser au mieux les défauts
de mise en position de cette dernière ainsi que ses
défauts de forme locaux. Pièces de Pièces de structure Roues
carrosserie de véhicule de véhiculeVision for Your Automation
Dévracage Exemples d’applications
Pour automatiser au meilleur coût le chargement d’une ligne
de production avec des pièces disposées en vrac, semi-rangées
ou rangées.
Du réel au virtuel
La scène de travail réelle est numérisée sous la forme
d’un nuage de points 3D.
Scène réelle
20 21
Nuage de points Modèle CAO 3D
Du virtuel au réel Pièces forgées Pièces
L’analyse de la scène de travail virtuelle permet de trouver mécaniques
la meilleure pièce à saisir.
La comparaison du nuage de points avec le modèle CAO
permet de choisir la meilleure pièce à prendre tout en
s’assurant que le préhenseur l’agrippera sans collision.
Le robot reçoit en temps réel la position de la pièce à saisir et,
pièce après pièce, vide entièrement le conteneur.
Gestion des trajectoires (Path Planning)
Sous- ensembles
Gestion des collisions Gestion des recouvrements Pièces de sécurité électromécaniquesVision for Your Automation
Identification Exemples d’applications
Pour automatiser au meilleur coût le traitement
de pièces dans un flux hétérogène.
Du réel au virtuel
La scène de travail réelle est numérisée sous la forme d’un nuage de points 3D.
22 23
Pièce réelle Nuage de points Modèle CAO 3D
Du virtuel au réel
L’analyse de la scène de travail permet d’identifier la pièce courante.
La comparaison du nuage de points avec les modèles CAO de la base
de données eyesberg 3D permet d’identifier et de localiser la pièce
courante dans le flux du process.
Peinture
Fonderie
L’automatisme reçoit en temps réel
l’identifiant et la position de la pièce
à laquelle il peut appliquer
un traitement dédié. EmboutissageNos systèmes sont compatibles avec
O R E T HA
M
350
O R E T HA LDW ER I EN
OR XP
15
N D
M I
350
ER I EN
E W
P
CE
15 E
N
INS
X
E CE
years
NS
INS
AL
L AT I O
IN
T PI N
years
NS
N
AL RT D O
L AT I O NER VISI
S
T
A 3
3
N
CIRD002-0220-FR
D O
VISI
Photos : VisioNerf - CE Barré - ShutterStock© - Folotlia©
Ces informations peuvent être modifiées sans avis préalable.
ZI de la Caille · 49340 NUAILLÉ - FRANCE
Tél.: + 33 (0)2 41 30 00 10 - Fax : + 33 (0)2 41 30 25 08
www.visionerf.comVous pouvez aussi lire