INTERACTION FLUIDE-STRUCTURE EN DYNAMIQUE RAPIDE AVEC GRANDS DÉPLACEMENTS ET ADAPTIVE MESH - REFINEMENT
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
INTERACTION FLUIDE-STRUCTURE EN
DYNAMIQUE RAPIDE AVEC GRANDS
DÉPLACEMENTS ET ADAPTIVE MESH
REFINEMENT
Maison de la Simulation
Vincent Faucher
CEA/DEN/DANS/DM2S/SEMT/DYN
14 AVRIL 2015
17 AVRIL 2015 CEA | 7 JUIN 2012 | PAGE 1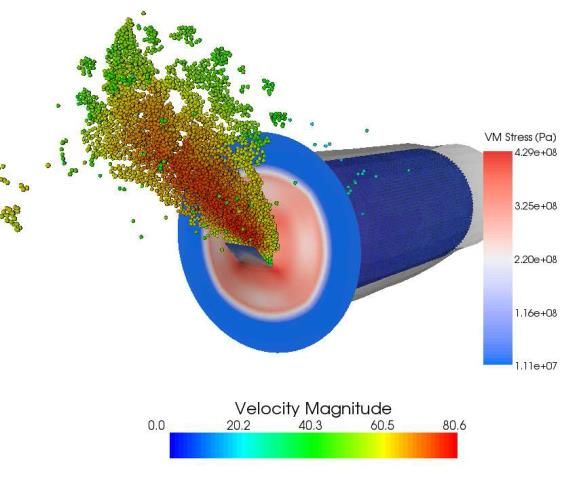
SIMULATION DE TRANSITOIRES RAPIDES POUR LES
FLUIDES ET LES STRUCTURES
Méthodes et modélisations Algorithmes et stratégies de résolution
Apparition et propagation de fissures Algorithme robuste et précis pour les
contraintes cinématiques
Fragmentation et ouverture de vides,
approches sans maillage Calcul parallèle à mémoire distribuée
Contact unilatéral générique ++
Interaction fluide-structure entre particules et Passage à l’échelle pour des modèles de
éléments finis ++ complexité industrielle
Approche hybride pour les supercalculateurs
Impédances pour la prise en compte des
singularités locales
Méthodes robuste pour les structures
immergées
Suivi d’interface entre fluides non-miscibles Maison de la Simulation | 14 avril 2015 | Introduction | PAGE 2/25
SIMULATION DE TRANSITOIRES RAPIDES POUR LES
FLUIDES ET LES STRUCTURES
Ruine des structures sous
chargement extrême
Méthodes et modélisations Algorithmes et stratégies de résolution
Apparition et propagation de fissures Algorithme robuste et précis pour les
contraintes cinématiques
Fragmentation et ouverture de vides,
approches sans maillage Calcul parallèle à mémoire distribuée
Contact unilatéral générique ++
Interaction fluide-structure entre particules et Passage à l’échelle pour des modèles de
éléments finis ++ complexité industrielle
Approche hybride pour les supercalculateurs
Impédances pour la prise en compte des
singularités locales
Méthodes robuste pour les structures
immergées
Suivi d’interface entre fluides non-miscibles Maison de la Simulation | 14 avril 2015 | Introduction | PAGE 2/25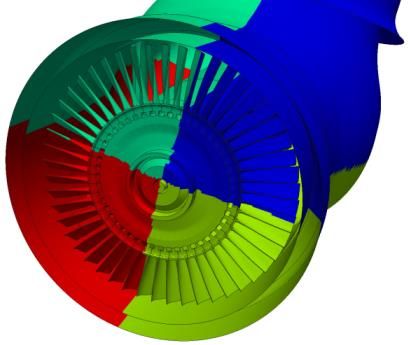
SIMULATION DE TRANSITOIRES RAPIDES POUR LES
FLUIDES ET LES STRUCTURES
Ruine des structures sous Fuites de fluide après
chargement extrême déchirure d’un réservoir
Méthodes et modélisations Algorithmes et stratégies de résolution
Apparition et propagation de fissures Algorithme robuste et précis pour les
contraintes cinématiques
Fragmentation et ouverture de vides,
approches sans maillage Calcul parallèle à mémoire distribuée
Contact unilatéral générique ++
Interaction fluide-structure entre particules et Passage à l’échelle pour des modèles de
éléments finis ++ complexité industrielle
Approche hybride pour les supercalculateurs
Impédances pour la prise en compte des
singularités locales
Méthodes robuste pour les structures
immergées
Suivi d’interface entre fluides non-miscibles Maison de la Simulation | 14 avril 2015 | Introduction | PAGE 2/25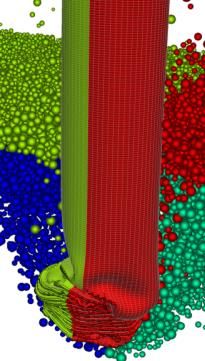
SIMULATION DE TRANSITOIRES RAPIDES POUR LES
FLUIDES ET LES STRUCTURES
Ruine des structures sous Fuites de fluide après Transitoire multi-phasique
chargement extrême déchirure d’un réservoir à l’échelle réacteur avec
IFS
Méthodes et modélisations Algorithmes et stratégies de résolution
Apparition et propagation de fissures Algorithme robuste et précis pour les
contraintes cinématiques
Fragmentation et ouverture de vides,
approches sans maillage Calcul parallèle à mémoire distribuée
Contact unilatéral générique ++
Interaction fluide-structure entre particules et Passage à l’échelle pour des modèles de
éléments finis ++ complexité industrielle
Approche hybride pour les supercalculateurs
Impédances pour la prise en compte des
singularités locales
Méthodes robuste pour les structures
immergées
Suivi d’interface entre fluides non-miscibles Maison de la Simulation | 14 avril 2015 | Introduction | PAGE 2/25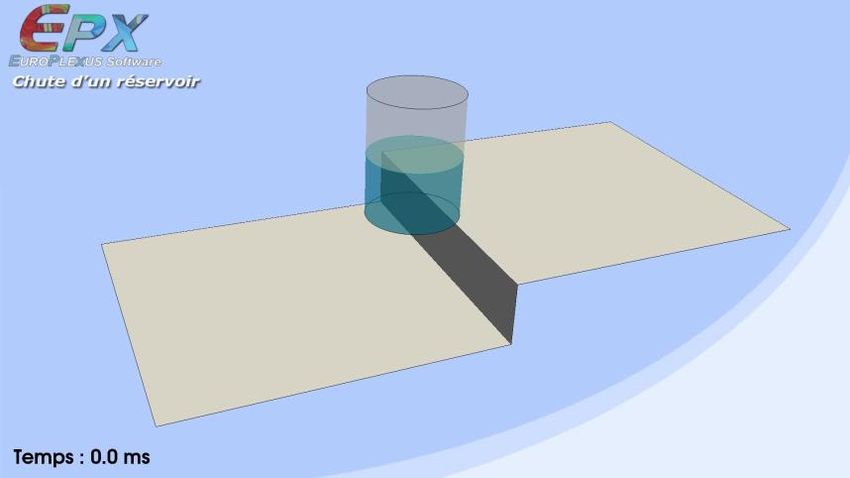
SIMULATION DE TRANSITOIRES RAPIDES POUR LES
FLUIDES ET LES STRUCTURES
Ruine des structures sous Fuites de fluide après Transitoire multi-phasique Transitoire explosif en
chargement extrême déchirure d’un réservoir à l’échelle réacteur avec sodium avec structures
IFS immergées
Méthodes et modélisations Algorithmes et stratégies de résolution
Apparition et propagation de fissures Algorithme robuste et précis pour les
contraintes cinématiques
Fragmentation et ouverture de vides,
approches sans maillage Calcul parallèle à mémoire distribuée
Contact unilatéral générique ++
Interaction fluide-structure entre particules et Passage à l’échelle pour des modèles de
éléments finis ++ complexité industrielle
Approche hybride pour les supercalculateurs
Impédances pour la prise en compte des
singularités locales
Méthodes robuste pour les structures
immergées
Suivi d’interface entre fluides non-miscibles Maison de la Simulation | 14 avril 2015 | Introduction | PAGE 2/25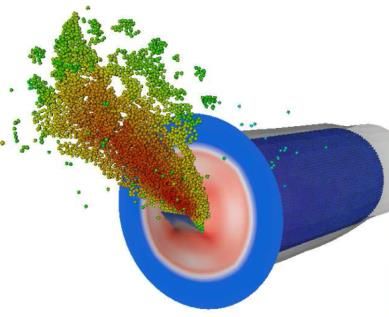
SOMMAIRE
1 Dynamique rapide en interaction fluide-structure avec interfaces 5
Equations à résoudre et choix de discrétisation
Couplages cinématiques ++
Suivi d’interfaces
Résolution
2 Implémentation d’une stratégie avec Adaptive Mesh Refinement 15
Principes de base
Résolution parallèle avec AMR
++
AMR multi-critères
Boundary hanging nodes et ALE
Exemple de démonstration
3 Conclusion et perspectives ++ 24
Maison de la Simulation | 14 avril 2015 | Sommaire | PAGE 3/25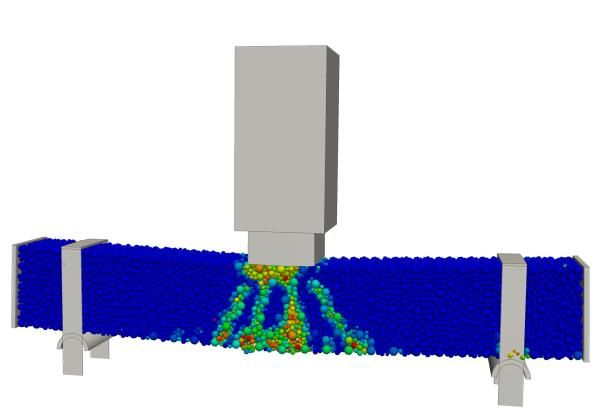
1. DYNAMIQUE RAPIDE EN
INTERACTION FLUIDE-STRUCTURE
AVEC INTERFACES
CEA | 7 JUIN 2012
| PAGE 4
17 AVRIL 2015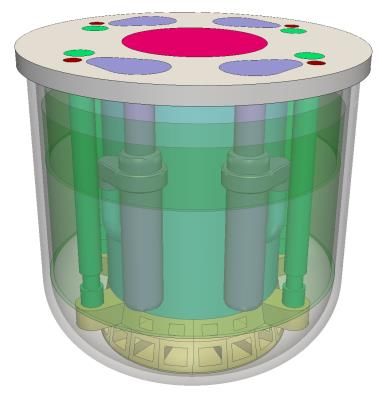
EQUATIONS À RÉSOUDRE ET CHOIX DE
DISCRÉTISATION
Equations locales
q q fvol
str
u P ftrans u fvol
flu
u 0
E u E P 0
Contraintes cinématiques
C(q, q, q,u,u) S
Intégration temporelle
explicite
t n
qn1/2 qn q
2
qn1 qn t qn1/2
un1 un t un
Caractéristiques
Non-linéarité géométrique
q
1
2
q t q q t q
Stabilité conditionnelle
2 l
t t c
max c
Maison de la Simulation | 14 avril 2015 | Dynamique rapide en IFS avec interfaces | PAGE 5/25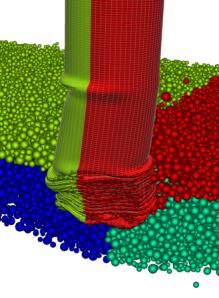
EQUATIONS À RÉSOUDRE ET CHOIX DE
DISCRÉTISATION
Equations locales Système discret
q q fvol
str
n 1
MS Flink strn 1
Fvol
Fint Q n1 Ffsin1
u P ftrans u f flu
vol Q n1
Cn1 n1 Sn1
u 0 U Volumes Finis pour le fluide
E u E P 0 F U
n 1 n
Conservatif en masse, énergie et QDM
pour le fluide
F U
n 1 n
Contraintes cinématiques Modèles fluides avancés
Pas d’équilibre imposé entre fluide et
C(q, q, q,u,u) S E E FE U
n 1 n
structure
Intégration temporelle
explicite
t n
qn1/2 qn q
2
qn1 qn t qn1/2
un1 un t un
Caractéristiques
Non-linéarité géométrique
q
1
2
q t q q t q
Stabilité conditionnelle
2 l
t t c
max c
Maison de la Simulation | 14 avril 2015 | Dynamique rapide en IFS avec interfaces | PAGE 5/25EQUATIONS À RÉSOUDRE ET CHOIX DE
DISCRÉTISATION
Equations locales Système discret
q q fvol
str
n 1
MS Flink strn 1
Fvol
Fint Q n1 Ffsin1
u P ftrans u f flu
vol Q n1
Cn1 n1 Sn1
u 0 U Volumes Finis pour le fluide
E u E P 0 F U
n 1 n
Conservatif en masse, énergie et QDM
pour le fluide
F U
n 1 n
Contraintes cinématiques Modèles fluides avancés
Pas d’équilibre imposé entre fluide et
C(q, q, q,u,u) S E E FE U
n 1 n
structure
Intégration temporelle
explicite
t MS Q n1 Fvol
str
n 1
Fint Q n1
n 1/2
q qn n
n 1 n 1
n 1
Flink flu
q FP Un1 Ftrans Un1
2 MF U Fvol
q q t qn1/2
n 1 n
Q n1
n 1 n 1 Mixte Eléments Finis – Volumes Finis
un1 un t un C n1 S pour le fluide
U
Equilibre et traitement générique des
F U
n 1 n
Caractéristiques contraintes cinématiques
Robuste
Non-linéarité géométrique
E E FE U
n 1 n
Non conservatif en QDM pour le fluide
q
1
2
q t q q t q
Stabilité conditionnelle
2 l
t t c
max c
Maison de la Simulation | 14 avril 2015 | Dynamique rapide en IFS avec interfaces | PAGE 5/25EQUATIONS À RÉSOUDRE ET CHOIX DE
DISCRÉTISATION
Equations locales Système discret
q q fvol
str
n 1
MS Flink strn 1
Fvol
Fint Q n1 Ffsin1
u P ftrans u f flu
vol Q n1
Cn1 n1 Sn1
u 0 U Volumes Finis pour le fluide
E u E P 0 F U
n 1 n
Conservatif en masse, énergie et QDM
pour le fluide
F U
n 1 n
Contraintes cinématiques Modèles fluides avancés
Pas d’équilibre imposé entre fluide et
C(q, q, q,u,u) S E E FE U
n 1 n
structure
Intégration temporelle
explicite
t MS Q n1 Fvol
str
n 1
Fint Q n1
n 1/2
q qn n
n 1 n 1
n 1
Flink flu
q FP Un1 Ftrans Un1
2 MF U Fvol
q q t qn1/2
n 1 n
Q n1
n 1 n 1 Mixte Eléments Finis – Volumes Finis
un1 un t un C n1 S pour le fluide
U
Equilibre et traitement générique des
F U
n 1 n
Caractéristiques contraintes cinématiques
Robuste
Non-linéarité géométrique
E E FE U
n 1 n
Non conservatif en QDM pour le fluide
q
1
2
q t q q t q
Stabilité conditionnelle
2 l
t t c
max c
Maison de la Simulation | 14 avril 2015 | Dynamique rapide en IFS avec interfaces | PAGE 5/25COUPLAGES CINÉMATIQUES
1- CONTACT UNILATÉRAL
Contact nœud contre face Contact entre pinballs
Principe Principe
Master facet
Slave node
Contact point
Nnod
U n 3/ 2
S n U
i 1
i
n 3/ 2
M n q1 q2 n12 0
Caractéristiques Caractéristiques
Détection très robuste
Contact glissant et frottant
Algorithme hiérarchique
Détection défaillante dans
Identification générique de la
certaines configurations
normale pour
géométriques
glissement/frottement
Maison de la Simulation | 14 avril 2015 | Dynamique rapide en IFS avec interfaces | PAGE 6/25COUPLAGES CINÉMATIQUES
2- INTERACTION FLUIDE-STRUCTURE
Situation classique d’interaction fluide- IFS avec maillages coïncidents
structure
Précision si choix bien
maîtrisé de la normale
Respect strict des
domaines fluides
Manque de robustesse
pour les grands
mouvements de structure
Complexité de maillage
IFS avec structures immergées
Robustesse pour les
grands déplacements de
structures
Compatible avec la
fragmentation
Maillage aisé
Pas de respect des
Transitoire explosif en domaines fluides
cuve Précision à contrôler
Maison de la Simulation | 14 avril 2015 | Dynamique rapide en IFS avec interfaces | PAGE 7/25SUIVI D’INTERFACE
SCHÉMA ANTI-DIFFUSIF VOFIRE (1/2)
Représentation des écoulements multi-composants non-miscibles
Approches sans mélange Approches avec mélange
Interfaces lagrangiennes entre les composants Mélange homogène (non-physique) dans une cellule
Volume Of Fluid : reconstruction des interfaces et Reconstruction éventuelle de l’interface (Front Tracking)
subdivision interne des cellules
Vérification exacte de la condition de non-miscibilité Simplicité d’implémentation (hors Front Tracking)
Difficulté de mise en œuvre et robustesse Dégradation de la précision si diffusion numérique
Maison de la Simulation | 14 avril 2015 | Dynamique rapide en IFS avec interfaces | PAGE 8/25SUIVI D’INTERFACE
SCHÉMA ANTI-DIFFUSIF VOFIRE (1/2)
Représentation des écoulements multi-composants non-miscibles
Approches sans mélange Approches avec mélange
Interfaces lagrangiennes entre les composants Mélange homogène (non-physique) dans une cellule
Volume Of Fluid : reconstruction des interfaces et Reconstruction éventuelle de l’interface (Front Tracking)
subdivision interne des cellules
Vérification exacte de la condition de non-miscibilité Simplicité d’implémentation (hors Front Tracking)
Difficulté de mise en œuvre et robustesse Dégradation de la précision si diffusion numérique
Maison de la Simulation | 14 avril 2015 | Dynamique rapide en IFS avec interfaces | PAGE 8/25SUIVI D’INTERFACE
SCHÉMA ANTI-DIFFUSIF VOFIRE (1/2)
Représentation des écoulements multi-composants non-miscibles
Approches sans mélange Approches avec mélange
Interfaces lagrangiennes entre les composants Mélange homogène (non-physique) dans une cellule
Volume Of Fluid : reconstruction des interfaces et Reconstruction éventuelle de l’interface (Front Tracking)
subdivision interne des cellules
Vérification exacte de la condition de non-miscibilité Simplicité d’implémentation (hors Front Tracking)
Difficulté de mise en œuvre et robustesse Dégradation de la précision si diffusion numérique
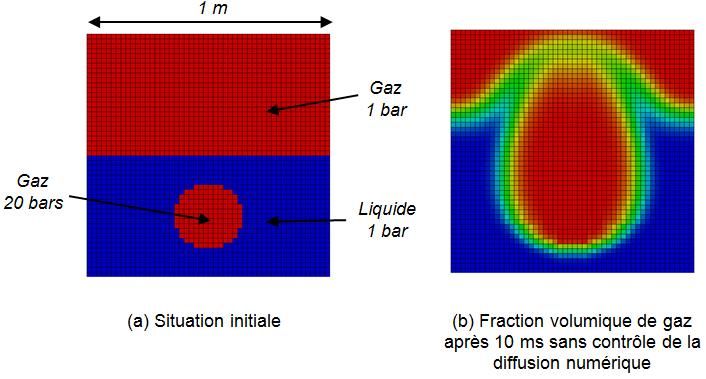
Diffusion numérique
Maison de la Simulation | 14 avril 2015 | Dynamique rapide en IFS avec interfaces | PAGE 8/25SUIVI D’INTERFACE
SCHÉMA ANTI-DIFFUSIF VOFIRE (1/2)
Représentation des écoulements multi-composants non-miscibles
Approches sans mélange Approches avec mélange
Interfaces lagrangiennes entre les composants Mélange homogène (non-physique) dans une cellule
Volume Of Fluid : reconstruction des interfaces et Reconstruction éventuelle de l’interface (Front Tracking)
subdivision interne des cellules
Vérification exacte de la condition de non-miscibilité Simplicité d’implémentation (hors Front Tracking)
Difficulté de mise en œuvre et robustesse Dégradation de la précision si diffusion numérique
Diffusion numérique Principe de la diffusion
Advection 1D de la fonction de Heavyside Choix pour hj+1/2
Upwind : hj+1/2 = hj Downwind : hj+1/2 = hj+1
Stabilité Pas de diffusion
Diffusion Croissance instable de h
Maison de la Simulation | 14 avril 2015 | Dynamique rapide en IFS avec interfaces | PAGE 8/25SUIVI D’INTERFACE
SCHÉMA ANTI-DIFFUSIF VOFIRE (1/2)
Représentation des écoulements multi-composants non-miscibles
Approches sans mélange Approches avec mélange
Interfaces lagrangiennes entre les composants Mélange homogène (non-physique) dans une cellule
Volume Of Fluid : reconstruction des interfaces et Reconstruction éventuelle de l’interface (Front Tracking)
subdivision interne des cellules
Vérification exacte de la condition de non-miscibilité Simplicité d’implémentation (hors Front Tracking)
Difficulté de mise en œuvre et robustesse Dégradation de la précision si diffusion numérique
Diffusion numérique Principe deScheme
Downwind la diffusion
with Constraints
[Després et Lagoutière, 2007][Kokh et Lagoutière, 2010]
Consistance : mj1/2 min hj ,hj1 hj1/2 max h j ,h j1 Mj1/2
Stabilité :
mj1/2 min hj1,hj h*j max h j1,h j Mj1/2
Δt de Heavyside
Advection 1D deh*la fonction
hj u hj1/2 hj1/2
Δx
Choix pour hj+1/2
Upwind : hj+1/2 = hj Downwind : hj+1/2 = hj+1
m j1/2 h j1/2 Mj1/2
x x
Mj1/2
ut
Mj1/2 h j h j1/2 m j1/2
ut
m j1/2 h j
Intervalle de confiance pour le flux
StabilitéChoix de la valeur la plus
enPas
avalde diffusion
dans cet
Diffusionintervalle Croissance instable de h
Maison de la Simulation | 14 avril 2015 | Dynamique rapide en IFS avec interfaces | PAGE 8/25SUIVI D’INTERFACE
SCHÉMA ANTI-DIFFUSIF VOFIRE (1/2)
Représentation des écoulements multi-composants non-miscibles
Approches sans mélange Approches avec mélange
Interfaces lagrangiennes entre les composants Mélange homogène (non-physique) dans une cellule
Volume Of Fluid : reconstruction des interfaces et Reconstruction éventuelle de l’interface (Front Tracking)
subdivision interne des cellules
Vérification exacte de la condition de non-miscibilité Simplicité d’implémentation (hors Front Tracking)
Difficulté de mise en œuvre et robustesse Dégradation de la précision si diffusion numérique
Diffusion numérique Principe deScheme
Downwind la diffusion
with Constraints
[Després et Lagoutière, 2007][Kokh et Lagoutière, 2010]
Consistance : mj1/2 min hj ,hj1 hj1/2 max h j ,h j1 Mj1/2
Stabilité :
mj1/2 min hj1,hj h*j max h j1,h j Mj1/2
Δt de Heavyside
Advection 1D deh*la fonction
hj u hj1/2 hj1/2
Δx
Choix pour hj+1/2
Upwind : hj+1/2 = hj Downwind : hj+1/2 = hj+1
m j1/2 h j1/2 Mj1/2
x x
Mj1/2
ut
Mj1/2 h j h j1/2 m j1/2
ut
m j1/2 h j
Intervalle de confiance pour le flux
StabilitéChoix de la valeur la plus
enPas
avalde diffusion
dans cet
Diffusionintervalle Croissance instable de h
Maison de la Simulation | 14 avril 2015 | Dynamique rapide en IFS avec interfaces | PAGE 8/25SUIVI D’INTERFACE
SCHÉMA ANTI-DIFFUSIF VOFIRE (2/2)
Schéma VOFIRE pour les écoulements liquide-gaz sur grille non-structurée mobile
Conservation de la masse du composant 1:
u
Snj 1nj 1cnj 1 Snj nj cnj t Lnj,k unj,k fj,k cnj,k t Lnj,r unj,r fj,r cnj,r 0
n n
cj,k kN rN
j
Cj,r
Extension au modèle à 5 équations
Défauts du modèles initial (Euler barotrope liquide-gaz)
Oscillations de pression sur l’interface : maillage
très fin requis pour les écoulements gravitaires
Manque de robustesse dans les faibles densités
(impact d’un jet sur une paroi par exemple)
Remplacement par un modèle à 5 équations
Lois d’état Stiffened Gas + transport non
conservatif du taux de vide
Insertion de la décomposition VOFIRE dans
l’équation d’advection du taux de vide
Calcul des intervalles de confiance pour le taux
de vide et le flux de masse par composant
Maison de la Simulation | 14 avril 2015 | Dynamique rapide en IFS avec interfaces | PAGE 9/25SUIVI D’INTERFACE
SCHÉMA ANTI-DIFFUSIF VOFIRE (2/2)
Schéma VOFIRE pour les écoulements liquide-gaz sur grille non-structurée mobile
Conservation de la masse du composant 1:
u
Snj 1nj 1cnj 1 Snj nj cnj t Lnj,k unj,k fj,k cnj,k t Lnj,r unj,r fj,r cnj,r 0
n n
cj,k kN rN
j
Cj,r
Extension au modèle à 5 équations
Défauts du modèles initial (Euler barotrope liquide-gaz)
Oscillations de pression sur l’interface : maillage
très fin requis pour les écoulements gravitaires
Manque de robustesse dans les faibles densités
(impact d’un jet sur une paroi par exemple)
Remplacement par un modèle à 5 équations
Lois d’état Stiffened Gas + transport non
conservatif du taux de vide
Insertion de la décomposition VOFIRE dans
l’équation d’advection du taux de vide
Calcul des intervalles de confiance pour le taux
de vide et le flux de masse par composant
Maison de la Simulation | 14 avril 2015 | Dynamique rapide en IFS avec interfaces | PAGE 9/25SUIVI D’INTERFACE
SCHÉMA ANTI-DIFFUSIF VOFIRE (2/2)
Schéma VOFIRE pour les écoulements liquide-gaz sur grille non-structurée mobile
Conservation de la masse du composant 1:
u
Snj 1nj 1cnj 1 Snj nj cnj t Lnj,k unj,k fj,k cnj,k t Lnj,r unj,r fj,r cnj,r 0
n n
cj,k kN rN
j Décomposition VOFIRE : c j,k c j,k
n R
p j,r j,k,r cnk cRj,k ; j,k,r 0,1
rN
Cj,r
Extension au modèle à 5 équations
Défauts du modèles initial (Euler barotrope liquide-gaz)
Oscillations de pression sur l’interface : maillage
très fin requis pour les écoulements gravitaires
Manque de robustesse dans les faibles densités
(impact d’un jet sur une paroi par exemple)
Remplacement par un modèle à 5 équations
Lois d’état Stiffened Gas + transport non
conservatif du taux de vide
Insertion de la décomposition VOFIRE dans
l’équation d’advection du taux de vide
Calcul des intervalles de confiance pour le taux
de vide et le flux de masse par composant
Maison de la Simulation | 14 avril 2015 | Dynamique rapide en IFS avec interfaces | PAGE 9/25SUIVI D’INTERFACE
SCHÉMA ANTI-DIFFUSIF VOFIRE (2/2)
Schéma VOFIRE pour les écoulements liquide-gaz sur grille non-structurée mobile
Conservation de la masse du composant 1:
u
Snj 1nj 1cnj 1 Snj nj cnj t Lnj,k unj,k fj,k cnj,k t Lnj,r unj,r fj,r cnj,r 0
n n
cj,k kN rN
j Décomposition VOFIRE : c j,k c j,k
n R
p j,r j,k,r cnk cRj,k ; j,k,r 0,1
rN
Cj,r
Extension au modèle à 5 équations
Défauts du modèles initial (Euler barotrope liquide-gaz)
Oscillations de pression sur l’interface : maillage
très fin requis pour les écoulements gravitaires
Manque de robustesse dans les faibles densités
(impact d’un jet sur une paroi par exemple)
Remplacement par un modèle à 5 équations
Lois d’état Stiffened Gas + transport non
conservatif du taux de vide
Insertion de la décomposition VOFIRE dans
l’équation d’advection du taux de vide
Calcul des intervalles de confiance pour le taux
de vide et le flux de masse par composant
Maison de la Simulation | 14 avril 2015 | Dynamique rapide en IFS avec interfaces | PAGE 9/25SUIVI D’INTERFACE
SCHÉMA ANTI-DIFFUSIF VOFIRE (2/2)
Schéma VOFIRE pour les écoulements liquide-gaz sur grille non-structurée mobile
Conservation de la masse du composant 1:
u
Snj 1nj 1cnj 1 Snj nj cnj t Lnj,k unj,k fj,k cnj,k t Lnj,r unj,r fj,r cnj,r 0
n n
cj,k kN rN
j Décomposition VOFIRE : c j,k c j,k
n R
p j,r j,k,r cnk cRj,k ; j,k,r 0,1
rN
Cj,r
kN ,rN
p j,k p j,r Snj 1nj 1cnj 1 Snj nj cnj tL cRj,k j,k,r p j,r cnk cRj,k tL cnj,r 0
Extension au modèle à 5 équations
Défauts du modèles initial (Euler barotrope liquide-gaz)
Oscillations de pression sur l’interface : maillage
très fin requis pour les écoulements gravitaires
Manque de robustesse dans les faibles densités
(impact d’un jet sur une paroi par exemple)
Remplacement par un modèle à 5 équations
Lois d’état Stiffened Gas + transport non
conservatif du taux de vide
Insertion de la décomposition VOFIRE dans
l’équation d’advection du taux de vide
Calcul des intervalles de confiance pour le taux
de vide et le flux de masse par composant
Maison de la Simulation | 14 avril 2015 | Dynamique rapide en IFS avec interfaces | PAGE 9/25SUIVI D’INTERFACE
SCHÉMA ANTI-DIFFUSIF VOFIRE (2/2)
Schéma VOFIRE pour les écoulements liquide-gaz sur grille non-structurée mobile
Conservation de la masse du composant 1:
u
Snj 1nj 1cnj 1 Snj nj cnj t Lnj,k unj,k fj,k cnj,k t Lnj,r unj,r fj,r cnj,r 0
n n
cj,k kN rN
j Décomposition VOFIRE : c j,k c j,k
n R
p j,r j,k,r cnk cRj,k ; j,k,r 0,1
rN
Cj,r
kN ,rN
p j,k p j,r Snj 1nj 1cnj 1 Snj nj cnj tL cRj,k j,k,r p j,r cnk cRj,k tL cnj,r 0
Somme convexe de problèmes pseudo-1D
Extension au modèle à 5 équations
Défauts du modèles initial (Euler barotrope liquide-gaz)
Oscillations de pression sur l’interface : maillage
très fin requis pour les écoulements gravitaires
Manque de robustesse dans les faibles densités
(impact d’un jet sur une paroi par exemple)
Remplacement par un modèle à 5 équations
Lois d’état Stiffened Gas + transport non
conservatif du taux de vide
Insertion de la décomposition VOFIRE dans
l’équation d’advection du taux de vide
Calcul des intervalles de confiance pour le taux
de vide et le flux de masse par composant
Maison de la Simulation | 14 avril 2015 | Dynamique rapide en IFS avec interfaces | PAGE 9/25RÉSOLUTION
1- PRINCIPALES TÂCHES ALGORITHMIQUES
Système discret
MS Q n1 t n1 Fvol
str
n 1
Fint Q n1
n 1 n 1
C Λ flu
MF U Fvol
FP Un1 Ftrans Un1
Q n1
Cn1 n1 Sn1
U Fn1
F U
n 1 n
E E FE U
n 1 n
Maison de la Simulation | 14 avril 2015 | Dynamique rapide en IFS avec interfaces | PAGE 10/25RÉSOLUTION
1- PRINCIPALES TÂCHES ALGORITHMIQUES
Système discret Calculs élémentaires
MS Q t n1
n 1
F
str n 1
Fint Q n1
o Calcul des contraintes et des forces internes
n 1 n 1
C Λ
vol
MF U flu
F
vol
FP Un1 Ftrans Un1
o
pour les différentes modélisations
Calcul des flux et suivi d’interface (fluide)
Q n 1 o Hétérogénéité des coûts par cellule
Cn1 n1 Sn1
U Fn1
F U
n 1 n
E E FE U
n 1 n
Maison de la Simulation | 14 avril 2015 | Dynamique rapide en IFS avec interfaces | PAGE 10/25RÉSOLUTION
1- PRINCIPALES TÂCHES ALGORITHMIQUES
Système discret Calculs élémentaires
MS Q t n1
n 1
F
str n 1
Fint Q n1
o Calcul des contraintes et des forces internes
n 1 n 1
C Λ
vol
MF U flu
F
vol
FP Un1 Ftrans Un1
o
pour les différentes modélisations
Calcul des flux et suivi d’interface (fluide)
Q n 1 o Hétérogénéité des coûts par cellule
Cn1 n1 Sn1
U Fn1
F U
n 1 n
E E FE U
n 1 n
Détection et écriture des contraintes cinématiques
o Détection des contacts
o Ecriture des relations d’interaction fluide-structure
o Tris spatiaux, calculs d’intersection et d’inclusion
Crash avec auto-contact Explosion en cuve avec
structures immergées
Maison de la Simulation | 14 avril 2015 | Dynamique rapide en IFS avec interfaces | PAGE 10/25RÉSOLUTION
1- PRINCIPALES TÂCHES ALGORITHMIQUES
Système discret Calculs élémentaires
MS Q t n1
n 1
F
str n 1
Fint Q n1
o Calcul des contraintes et des forces internes
n 1 n 1
C Λ
vol
MF U flu
F
vol
FP Un1 Ftrans Un1
o
pour les différentes modélisations
Calcul des flux et suivi d’interface (fluide)
Q n 1 o Hétérogénéité des coûts par cellule
Cn1 n1 Sn1
U Fn1
F U
n 1 n
E E FE U
n 1
Calcul des forces d’interaction
n
o Condensation sur les multiplicateurs
1 1
Détection et écriture des contraintes cinématiques M
n 1 n 1 n 1 MS n1
C S n 1
t
C Λ C n 1
F Sn1
o Détection des contacts MF MF
o Ecriture des relations d’interaction fluide-structure
Hn1Λ Bn1
o Tris spatiaux, calculs d’intersection et d’inclusion
o Résolution et calcul des forces de liaison
Crash avec auto-contact Explosion en cuve avec
structures immergées
Maison de la Simulation | 14 avril 2015 | Dynamique rapide en IFS avec interfaces | PAGE 10/25RÉSOLUTION
2- IMPLÉMENTATION PARALLÈLE (MPI)
Gestion générique des contraintes cinématiques
Ecriture inter-domaines de contraintes transitoires avec entités remote
Candidats remote
Candidat remote
SD2
SD1
SD1
Candidats
Candidats Facettes locaux
locaux SD2 locales Eléments de structure locaux
Contact unilatéral Interaction fluide-structure immergée
Maison de la Simulation | 14 avril 2015 | Dynamique rapide en IFS avec interfaces | PAGE 11/25RÉSOLUTION
2- IMPLÉMENTATION PARALLÈLE (MPI)
Gestion générique des contraintes cinématiques
Ecriture inter-domaines de contraintes transitoires avec entités remote Résolution
Candidats remote
Candidat remote
SD2
SD1
SD1
Groupe 1
Groupe 2
Candidats
Candidats Facettes locaux
locaux SD2 locales Eléments de structure locaux
Contact unilatéral Interaction fluide-structure immergée
Maison de la Simulation | 14 avril 2015 | Dynamique rapide en IFS avec interfaces | PAGE 11/25RÉSOLUTION
2- IMPLÉMENTATION PARALLÈLE (MPI)
Gestion générique des contraintes cinématiques
Ecriture inter-domaines de contraintes transitoires avec entités remote Résolution
Candidats remote
Candidat remote
SD2
SD1 SD1
SD1
Groupe 1
local SD2 Groupe 2
global
Candidats
Candidats Facettes locaux
locaux SD2 locales Eléments de structure locaux
Contact unilatéral Interaction fluide-structure immergée
Maison de la Simulation | 14 avril 2015 | Dynamique rapide en IFS avec interfaces | PAGE 11/25RÉSOLUTION
2- IMPLÉMENTATION PARALLÈLE (MPI)
Gestion générique des contraintes cinématiques
Ecriture inter-domaines de contraintes transitoires avec entités remote Résolution
Candidats remote
Candidat remote Expression de l’opérateur :
1
SD2
n 1 n 1 MS
SD1 H SD1
C n 1
t
Cn1
MF
SD1
Opérateur diagonal par blocs
Stratégie à définir pour les blocs inter-
domaines.
Limites à l’extensibilité :
Identifications des blocs multi-
Groupedomaines
1
local SD2 Groupe 2
global
Candidats Calcul couplé des efforts
Candidats Facettes locaux
locaux SD2 correspondants
locales Eléments de structure locaux
Contact unilatéral Interaction fluide-structure immergée
Configurations évaluées positivement
Calculs de structure avec Interaction fluide-structure Ecoulements complexes sur grille fixe
données matérielles très immergée avec déplacements ou ALE
hétérogènes (EDF) modérés
Maison de la Simulation | 14 avril 2015 | Dynamique rapide en IFS avec interfaces | PAGE 11/25RÉSOLUTION
2- IMPLÉMENTATION PARALLÈLE (MPI)
Gestion générique des contraintes cinématiques
Ecriture inter-domaines de contraintes transitoires avec entités remote Résolution
Candidats remote
Candidat remote Expression de l’opérateur :
1
SD2
n 1 n 1 MS
SD1 H SD1
C n 1
t
Cn1
MF
SD1
Opérateur diagonal par blocs
Stratégie à définir pour les blocs inter-
domaines.
Limites à l’extensibilité :
Identifications des blocs multi-
Groupedomaines
1
local SD2 Groupe 2
global
Candidats Calcul couplé des efforts
Candidats Facettes locaux
locaux SD2 correspondants
locales Eléments de structure locaux
Contact unilatéral Interaction fluide-structure immergée
Configurations
Configurations problématiques
évaluées positivement
Calculs de structure avec Interaction fluide-structure Ecoulements complexes sur grille fixe
Contact avec grands déplacements
données matérielles très relatifs entre ou ALE
immergée avec déplacementsApproches sans maillage avec
structures
hétérogènes (EDF) modérés perte de structure du modèle
Maison de la Simulation | 14 avril 2015 | Dynamique rapide en IFS avec interfaces | PAGE 11/25RÉSOLUTION
3- CARACTÉRISTIQUES DU SOLVEUR DISTRIBUÉ (1/2)
Deux difficulté majeures
1 Perte de qualité de la décomposition de domaine 2 Calcul centralisé des forces de réactions globales
Maison de la Simulation | 14 avril 2015 | Dynamique rapide en IFS avec interfaces | PAGE 12/25RÉSOLUTION
3- CARACTÉRISTIQUES DU SOLVEUR DISTRIBUÉ (1/2)
Deux difficulté majeures
1 Perte de qualité de la décomposition de domaine 2 Calcul centralisé des forces de réactions globales
Illustration du problème pour de grands mouvements relatifs de structures en
contact
Situation initiale pour un sous- Le même sous-domaine après un
domaine donné demi-tour du rotor
Maison de la Simulation | 14 avril 2015 | Dynamique rapide en IFS avec interfaces | PAGE 12/25RÉSOLUTION
3- CARACTÉRISTIQUES DU SOLVEUR DISTRIBUÉ (1/2)
Deux difficulté majeures
1 Perte de qualité de la décomposition de domaine 2 Calcul centralisé des forces de réactions globales
Décomposition de domaine dynamique
Contraintes d’implémentation
Pas de centralisation du modèle complet sur un
processus MPI
Actualisation transparente pour l’utilisateur
Coût réduit pour l’actualisation
Critères de réactualisation
Fréquence imposée dans le jeu de données
Critères automatiques à développer
Prise en compte de la signification physique de la
condition de stabilité
Persistance des données de l’ordre de 1000
cycles en temps
Maison de la Simulation | 14 avril 2015 | Dynamique rapide en IFS avec interfaces | PAGE 12/25RÉSOLUTION
3- CARACTÉRISTIQUES DU SOLVEUR DISTRIBUÉ (1/2)
Deux difficulté majeures
1 Perte de qualité de la décomposition de domaine 2 Calcul centralisé des forces de réactions globales
Décomposition de domaine dynamique
Contraintes d’implémentation
Pas de centralisation du modèle complet sur un
processus MPI
Actualisation transparente pour l’utilisateur
Coût réduit pour l’actualisation
Critères de réactualisation
Fréquence imposée dans le jeu de données
Critères automatiques à développer
Prise en compte de la signification physique de la
condition de stabilité
Persistance des données de l’ordre de 1000
cycles en temps
Temps d’actualisation < 2% du temps de calcul entre deux actualisations
sur des exemples significatifs
Maison de la Simulation | 14 avril 2015 | Dynamique rapide en IFS avec interfaces | PAGE 12/25RÉSOLUTION
3- CARACTÉRISTIQUES DU SOLVEUR DISTRIBUÉ (2/2)
Deux difficulté majeures
1 Perte de qualité de la décomposition de domaine 2 Calcul centralisé des forces de réactions globales
1e objectif : ne pas assembler d’opérateur
global
Approche itérative : Λ k R k Hn1Λ k Bn1
Evaluation du résidu :
Fk t Cng1Λ k Calcul des
++forces sur les ddls locaux et
remote sur le SD où chaque liaison est écrite
Transfert et sommation des forces sur les ddls remote FkS
R k Cng1M1FkS Bn1 Résidu partiel sur chaque SD
Algorithme de résolution : Gradient Conjugué
Maison de la Simulation | 14 avril 2015 | Dynamique rapide en IFS avec interfaces | PAGE 13/25RÉSOLUTION
3- CARACTÉRISTIQUES DU SOLVEUR DISTRIBUÉ (2/2)
Deux difficulté majeures
1 Perte de qualité de la décomposition de domaine 2 Calcul centralisé des forces de réactions globales
1e objectif : ne pas assembler d’opérateur
global
Approche itérative : Λ k R k Hn1Λ k Bn1
Evaluation du résidu :
Fk t Cng1Λ k Calcul des
++forces sur les ddls locaux et
remote sur le SD où chaque liaison est écrite
Transfert et sommation des forces sur les ddls remote FkS
R k Cng1M1FkS Bn1 Résidu partiel sur chaque SD
Algorithme de résolution : Gradient Conjugué
Préconditionneur obtenu
2e objectif : converger rapidement en négligeant les
couplages inter-domaines
Préconditionnement indispensable
Résolution de problèmes locaux avec remote
Maison de la Simulation | 14 avril 2015 | Dynamique rapide en IFS avec interfaces | PAGE 13/25RÉSOLUTION
3- CARACTÉRISTIQUES DU SOLVEUR DISTRIBUÉ (2/2)
Illustrations
Deux difficulté majeures
1 Perte de qualité de la décomposition de domaine 2 Calcul centralisé des forces de réactions globales
1e objectif : ne pas assembler d’opérateur
global
Approche itérative : Λ k R k Hn1Λ k Bn1
Evaluation du résidu :
Fk t Cng1Λ k Calcul des
++forces sur les ddls locaux et
remote sur le SD où chaque liaison est écrite
Transfert et sommation des forces sur les ddls remote FkS
R k Cng1M1FkS Bn1 Résidu partiel sur chaque SD
Algorithme de résolution : Gradient Conjugué
Préconditionneur obtenu
2e objectif : converger rapidement en négligeant les
couplages inter-domaines
Préconditionnement indispensable
Résolution de problèmes locaux avec remote
Maison de la Simulation | 14 avril 2015 | Dynamique rapide en IFS avec interfaces | PAGE 13/25RÉSOLUTION
3- CARACTÉRISTIQUES DU SOLVEUR DISTRIBUÉ (2/2)
Illustrations
Deux difficulté majeures
1 Perte de qualité de la décomposition de domaine 2 Calcul centralisé des forces de réactions globales
1e objectif : ne pas assembler d’opérateur
global
Approche itérative : Λ k R k Hn1Λ k Bn1
Evaluation du résidu :
Fk t Cng1Λ k Calcul des
++forces sur les ddls locaux et
remote sur le SD où chaque liaison est écrite
Transfert et sommation des forces sur les ddls remote FkS
R k Cng1M1FkS Bn1 Résidu partiel sur chaque SD
Algorithme de résolution : Gradient Conjugué
Préconditionneur obtenu
2e objectif : converger rapidement en négligeant les
couplages inter-domaines
Préconditionnement indispensable
Résolution de problèmes locaux avec remote
Maison de la Simulation | 14 avril 2015 | Dynamique rapide en IFS avec interfaces | PAGE 13/252. IMPLÉMENTATION D’UNE
STRATÉGIE AVEC ADAPTIVE MESH
REFINEMENT
CEA | 7 JUIN 2012
| PAGE 14
17 AVRIL 2015PRINCIPES DE BASE
1. CAHIER DES CHARGES
Technologie AMR
Gestion du maillage
Pas de recours à un mailleur externe
Compatibilité avec les grilles mobiles (lagrangien et ALE)
Raffinement pour fluide et structure sans restriction a
priori
Critères de raffinement
Suivi des fronts d’onde
Suivi des surfaces d’interaction (contact, fluide-structure)
Suivi des interfaces
Inter-compatibilité entre les critères
Résolution
Connexions cinématiques Stratégie parallèle
Prise en compte des contraintes de contact Compatibilité avec le solveur distribué multi-
unilatéral domaines
Prise en compte des contraintes d’IFS Equilibrage dynamique de la charge en présence
conformes de raffinement
Prise en compte des contraintes d’IFS
immergées
Maison de la Simulation | 14 avril 2015 | Implémentation d’une stratégie avec AMR | PAGE 15/25PRINCIPES DE BASE
2. TRAVAUX ANTÉRIEURS
Subdivision conforme (octree) Gestion des hanging nodes
Hanging nodes courants : continuité cinématique à
assurer
Boundary hanging nodes : propagation des conditions aux
limites et des contraintes d’interaction au bord du maillage
Collaboration EC-JRC/Ispra – UPC Barcelone
Thèse F. Verdugo
Technologie EPX : F. Casadei, P. Diez
Raffinement initial dans une AMR et IFS : travaux préliminaires
bulle d’explosif
Maison de la Simulation | 14 avril 2015 | Implémentation d’une stratégie avec AMR | PAGE 16/25RÉSOLUTION PARALLÈLE AVEC AMR
1. STRUCTURE DE DONNÉES ET COMMUNICATIONS
Problématique générale
? R SD 2
Cellules fantômes de
base
SD 1 ?
Cellules courantes
(base et adap)
Maison de la Simulation | 14 avril 2015 | Implémentation d’une stratégie avec AMR | PAGE 17/25RÉSOLUTION PARALLÈLE AVEC AMR
1. STRUCTURE DE DONNÉES ET COMMUNICATIONS
Problématique générale
Raffiner et déraffiner les
cellules fantômes comme
les cellules courantes
Rend complexe l’usage
d’algorithmes de R SD 2
raffinement récursifs
Cellules fantômes de
base
Cellules courantes
SD 1
(base et adap)
Maison de la Simulation | 14 avril 2015 | Implémentation d’une stratégie avec AMR | PAGE 17/25RÉSOLUTION PARALLÈLE AVEC AMR
1. STRUCTURE DE DONNÉES ET COMMUNICATIONS
Problématique générale
Raffiner et déraffiner les
cellules fantômes comme
les cellules courantes
Rend complexe l’usage
d’algorithmes de R SD 2
raffinement récursifs
Cellules fantômes de
base
Cellules courantes
SD 1
(base et adap)
Adaptation des communications pour les
cellules fantômes
Numérotation locale des cellules adap dans un cellule
fantôme de base
Echanges spécifiques pour les indicateurs
Données sur tous les nœuds et cellules adap à
l’intérieur d’une cellule fantôme potentiellement utiles
Maison de la Simulation | 14 avril 2015 | Implémentation d’une stratégie avec AMR | PAGE 17/25RÉSOLUTION PARALLÈLE AVEC AMR
1. STRUCTURE DE DONNÉES ET COMMUNICATIONS
Problématique générale
Raffiner et déraffiner les
cellules fantômes comme
les cellules courantes
Rend complexe l’usage
d’algorithmes de R SD 2
raffinement récursifs
Cellules fantômes de
base
Cellules courantes
SD 1
(base et adap)
Adaptation des communications pour les
cellules fantômes
Numérotation locale des cellules adap dans un cellule
fantôme de base
Echanges spécifiques pour les indicateurs
Données sur tous les nœuds et cellules adap à
l’intérieur d’une cellule fantôme potentiellement utiles
Maison de la Simulation | 14 avril 2015 | Implémentation d’une stratégie avec AMR | PAGE 17/25RÉSOLUTION PARALLÈLE AVEC AMR
2. NUMÉROTATION DES NŒUDS
Besoin d’une numérotation globale des nœuds
Indispensable pour identifier de manière unique un nœud dans une relation inter-domaines
Stratégie pour la numérotation globale
SD j (j > i)
SD i
Aucun changement dans le solveur multi-domaines sur les liaisons
Gestion des hanging links
Les hanging links sont créés seulement entre nœuds locaux et sur le processus où le hanging node est défini
Les nouveaux couplages inter-domaines résultant de hanging links sont gérés comme pour toutes les autres
contraintes cinématiques non-permanentes)
Maison de la Simulation | 14 avril 2015 | Implémentation d’une stratégie avec AMR | PAGE 18/25RÉSOLUTION PARALLÈLE AVEC AMR
2. NUMÉROTATION DES NŒUDS
Besoin d’une numérotation globale des nœuds
Indispensable pour identifier de manière unique un nœud dans une relation inter-domaines
Stratégie pour la numérotation globale
Numéro global des
nœuds de base
SD j (j > i)
Incrémenter avec
les nœuds adap de
chaque sous-
domaine par ordre
SD i croissant
Aucun changement dans le solveur multi-domaines sur les liaisons
Gestion des hanging links
Les hanging links sont créés seulement entre nœuds locaux et sur le processus où le hanging node est défini
Les nouveaux couplages inter-domaines résultant de hanging links sont gérés comme pour toutes les autres
contraintes cinématiques non-permanentes)
Maison de la Simulation | 14 avril 2015 | Implémentation d’une stratégie avec AMR | PAGE 18/25RÉSOLUTION PARALLÈLE AVEC AMR
2. NUMÉROTATION DES NŒUDS
Besoin d’une numérotation globale des nœuds
Indispensable pour identifier de manière unique un nœud dans une relation inter-domaines
Stratégie pour la numérotation globale
Numéro global des
nœuds de base
SD j (j > i)
Incrémenter avec
les nœuds adap de
chaque sous-
domaine par ordre
SD i croissant
Aucun changement dans le solveur multi-domaines sur les liaisons
Gestion des hanging links
Les hanging links sont créés seulement entre nœuds locaux et sur le processus où le hanging node est défini
Les nouveaux couplages inter-domaines résultant de hanging links sont gérés comme pour toutes les autres
contraintes cinématiques non-permanentes)
Maison de la Simulation | 14 avril 2015 | Implémentation d’une stratégie avec AMR | PAGE 18/25RÉSOLUTION PARALLÈLE AVEC AMR
2. NUMÉROTATION DES NŒUDS
Besoin d’une numérotation globale des nœuds
Indispensable pour identifier de manière unique un nœud dans une relation inter-domaines
Stratégie pour la numérotation globale
Nœuds existant sur
SD j mais définis en Numéro global des
premier sur SD i nœuds de base
SD j (j > i)
Incrémenter avec
les nœuds adap de
chaque sous-
domaine par ordre
SD i croissant
Aucun changement dans le solveur multi-domaines sur les liaisons
Gestion des hanging links
Les hanging links sont créés seulement entre nœuds locaux et sur le processus où le hanging node est défini
Les nouveaux couplages inter-domaines résultant de hanging links sont gérés comme pour toutes les autres
contraintes cinématiques non-permanentes)
Maison de la Simulation | 14 avril 2015 | Implémentation d’une stratégie avec AMR | PAGE 18/25RÉSOLUTION PARALLÈLE AVEC AMR
2. NUMÉROTATION DES NŒUDS
Besoin d’une numérotation globale des nœuds
Indispensable pour identifier de manière unique un nœud dans une relation inter-domaines
Stratégie pour la numérotation globale
Nœuds existant sur
SD j mais définis en Numéro global des
premier sur SD i nœuds de base
SD j (j > i)
Incrémenter avec
les nœuds adap de
chaque sous-
domaine par ordre
SD i croissant
Aucun changement dans le solveur multi-domaines sur les liaisons
Gestion des hanging links
Les hanging links sont créés seulement entre nœuds locaux et sur le processus où le hanging node est défini
Les nouveaux couplages inter-domaines résultant de hanging links sont gérés comme pour toutes les autres
contraintes cinématiques non-permanentes)
Maison de la Simulation | 14 avril 2015 | Implémentation d’une stratégie avec AMR | PAGE 18/25RÉSOLUTION PARALLÈLE AVEC AMR
2. NUMÉROTATION DES NŒUDS
Besoin d’une numérotation globale des nœuds
Indispensable pour identifier de manière unique un nœud dans une relation inter-domaines
Stratégie pour la numérotation globale
Nœuds existant sur
SD j mais définis en Numéro global des
premier sur SD i nœuds de base
SD j (j > i)
Incrémenter avec
les nœuds adap de
chaque sous-
domaine par ordre
SD i croissant
Aucun changement dans le solveur multi-domaines sur les liaisons
Gestion des hanging links
Les hanging links sont créés seulement entre nœuds locaux et sur le processus où le hanging node est défini
Les nouveaux couplages inter-domaines résultant de hanging links sont gérés comme pour toutes les autres
contraintes cinématiques non-permanentes)
Maison de la Simulation | 14 avril 2015 | Implémentation d’une stratégie avec AMR | PAGE 18/25RÉSOLUTION PARALLÈLE AVEC AMR
3. EXEMPLES
Onde de choc en 3D
Maison de la Simulation | 14 avril 2015 | Implémentation d’une stratégie avec AMR | PAGE 19/25RÉSOLUTION PARALLÈLE AVEC AMR
3. EXEMPLES
Onde de choc en 3D Onde de choc en 3D avec IFS
Maison de la Simulation | 14 avril 2015 | Implémentation d’une stratégie avec AMR | PAGE 19/25AMR MULTI-CRITÈRES
1. PRINCIPE
Des critères simples, faciles à combiner et à
paralléliser
Critère donné par une simple distance entre un
point et un nuage de référence
Maison de la Simulation | 14 avril 2015 | Implémentation d’une stratégie avec AMR | PAGE 20/25AMR MULTI-CRITÈRES
1. PRINCIPE
Des critères simples, faciles à combiner et à
paralléliser
Critère donné par une simple distance entre un
point et un nuage de référence
Maison de la Simulation | 14 avril 2015 | Implémentation d’une stratégie avec AMR | PAGE 20/25AMR MULTI-CRITÈRES
1. PRINCIPE
Des critères simples, faciles à combiner et à
paralléliser
Critère donné par une simple distance entre un
point et un nuage de référence
Maison de la Simulation | 14 avril 2015 | Implémentation d’une stratégie avec AMR | PAGE 20/25AMR MULTI-CRITÈRES
1. PRINCIPE
Des critères simples, faciles à combiner et à
paralléliser
Critère donné par une simple distance entre un
point et un nuage de référence
Maison de la Simulation | 14 avril 2015 | Implémentation d’une stratégie avec AMR | PAGE 20/25AMR MULTI-CRITÈRES
1. PRINCIPE
Des critères simples, faciles à combiner et à
paralléliser
Critère donné par une simple distance entre un
point et un nuage de référence
Maison de la Simulation | 14 avril 2015 | Implémentation d’une stratégie avec AMR | PAGE 20/25AMR MULTI-CRITÈRES
1. PRINCIPE
Des critères simples, faciles à combiner et à
paralléliser
Critère donné par une simple distance entre un
point et un nuage de référence
Maison de la Simulation | 14 avril 2015 | Implémentation d’une stratégie avec AMR | PAGE 20/25AMR MULTI-CRITÈRES
1. PRINCIPE
Des critères simples, faciles à combiner et à Implémentation parallèle
paralléliser Simple échange des points de référence
Critère donné par une simple distance entre un Filtrage par la bounding box de chaque processus
point et un nuage de référence (idem contact, IFS…)
Maison de la Simulation | 14 avril 2015 | Implémentation d’une stratégie avec AMR | PAGE 20/25AMR MULTI-CRITÈRES
1. PRINCIPE
Des critères simples, faciles à combiner et à Implémentation parallèle
paralléliser Simple échange des points de référence
Critère donné par une simple distance entre un Filtrage par la bounding box de chaque processus
point et un nuage de référence (idem contact, IFS…)
Maison de la Simulation | 14 avril 2015 | Implémentation d’une stratégie avec AMR | PAGE 20/25AMR MULTI-CRITÈRES
2. EXEMPLES
Gradient de pression et IFS immergée
Maison de la Simulation | 14 avril 2015 | Implémentation d’une stratégie avec AMR | PAGE 21/25AMR MULTI-CRITÈRES
2. EXEMPLES
Gradient de pression et IFS immergée Courbure du champ de vitesse et contact
Maison de la Simulation | 14 avril 2015 | Implémentation d’une stratégie avec AMR | PAGE 21/25BOUNDARY HANGING NODES ET ALE
Report des conditions aux limites sur les
frontières du domaine
Interpolation des normales
Mouvement de grille sur les cellules de base
uniquement
Maison de la Simulation | 14 avril 2015 | Implémentation d’une stratégie avec AMR | PAGE 22/25BOUNDARY HANGING NODES ET ALE
Report des conditions aux limites sur les Mouvement d’interfaces
frontières du domaine Critère de raffinement au voisinage de la
Interpolation des normales discontinuité de concentration
Mouvement de grille sur les cellules de base
uniquement
Maison de la Simulation | 14 avril 2015 | Implémentation d’une stratégie avec AMR | PAGE 22/25EXEMPLE DE DÉMONSTRATION
CHUTE D’UN RÉSERVOIR AVEC AMR
Maison de la Simulation | 14 avril 2015 | Implémentation d’une stratégie avec AMR | PAGE 23/253. CONCLUSION ET PERSPECTIVES
CEA | 7 JUIN 2012
| PAGE 24
17 AVRIL 2015CONCLUSIONS ET PERSPECTIVES
Ce qui fonctionne
Technologie AMR opérationnelle pour la majorité
des fonctionnalités d’EPX : non-structuré,
maillage mobiles, connexions cinématiques
variées
Insertion dans le formalisme multi-domaines pour
le parallélisme à mémoire distribué (éléments
finis uniquement)
Mise en œuvre d’une famille de critères de
raffinement aisés à calculer et à combiner
Développement actif via JRC/Ispra (extension
aux coques par exemple)
Maison de la Simulation | 14 avril 2015 | Conclusions et perspectives | PAGE 25/25CONCLUSIONS ET PERSPECTIVES
Ce qui fonctionne Encore un effort…
Technologie AMR opérationnelle pour la majorité Performance parallèle à consolider
des fonctionnalités d’EPX : non-structuré, Nombreuses optimisations pour la gestion des
maillage mobiles, connexions cinématiques zones d’extension dans la structure de données
variées d’EPX
Insertion dans le formalisme multi-domaines pour Déséquilibre entre les sous-domaines (voir ci-
le parallélisme à mémoire distribué (éléments dessous)
finis uniquement) Détérioration de la convergence de l’algorithme de
Mise en œuvre d’une famille de critères de calcul distribuée des efforts de liaisons
raffinement aisés à calculer et à combiner Généralisation aux volumes finis à faire
Développement actif via JRC/Ispra (extension Intégrer l’AMR dans la mise à jour de la
aux coques par exemple) décomposition de domaine
Voie vers une gestion dynamique de la mémoire
Correction des déséquilibres en intégrant la
subdivision dans la pondération de la
décomposition de domaine
Des simulations de validation à réaliser
Essais disponibles en fluide-structure sous impact
(ONERA)
Simulations commencées, non abouties…
Maison de la Simulation | 14 avril 2015 | Conclusions et perspectives | PAGE 25/25CONCLUSIONS ET PERSPECTIVES
Maison de la Simulation | 14 avril 2015 | Conclusions et perspectives | PAGE 25/25CONCLUSIONS ET PERSPECTIVES
Maison de la Simulation | 14 avril 2015 | Conclusions et perspectives | PAGE 25/25CONCLUSIONS ET PERSPECTIVES
Maison de la Simulation | 14 avril 2015 | Conclusions et perspectives | PAGE 25/25CONCLUSIONS ET PERSPECTIVES
Maison de la Simulation | 14 avril 2015 | Conclusions et perspectives | PAGE 25/25http://www-epx.cea.fr
| PAGE 26
Commissariat à l’énergie atomique et aux énergies alternatives Direction de l’Energie Nucléaire
CEA | 7 JUIN 2012 Centre de Saclay | 91191 Gif-sur-Yvette Cedex Département de Modélisation des
T. +33 (0)1 69 08 40 18| F. +33 (0)1 69 08 76 19 Systèmes et Structures
Service d’Etudes Mécaniques et
Etablissement public à caractère industriel et commercial | RCS Paris B 775 685 019
17 AVRIL 2015 ThermiquesVous pouvez aussi lire