Prototype of a tensegrity manipulator to mimic bird necks
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
24ème Congrès Français de Mécanique Brest, 26 au 30 Août 2019
Prototype of a tensegrity manipulator to mimic bird
necks
Matthieu Fureta , Damien Chablata , Benjamin Fasquellea , Parag Khannab ,
Christine Chevallereaua , Philippe Wengera
a. Laboratoire des Sciences du Numerique de Nantes, CNRS, Ecole Centrale de Nantes, France,
firstname.name@ls2n.fr
b. Ecole Centrale de Nantes, France, firstname.name@eleves.ec-nantes.fr
Résumé :
Une structure de tenségrité est un assemblage d’éléments en compression (barres) et d’éléments en trac-
tion (câbles, ressorts) maintenus ensemble en équilibre [1],[2]. La tenségrité est connue en architecture
et en art depuis plus d’un siècle [3] et est adaptée à la modélisation des organismes vivants [4]. Les mé-
canismes de tenségrité ont été étudiés plus récemment pour leurs propriétés prometteuses en robotique
telles que la faible inertie, la souplesse naturelle et la capacité de déploiement [5]. Un mécanisme de
tenségrité est obtenu lorsqu’un ou plusieurs éléments sont actionnés. Ces travaux s’inscrivent dans le
cadre du projet AVINECK, auquel participent des biologistes et des roboticiens dans le but principal de
modéliser et de concevoir des cous d’oiseaux. En conséquence, une classe de manipulateurs de tenségrité
planaire composée d’un assemblage en série de plusieurs mécanismes en X de Snelson [6], c’est-à-dire
des mécanismes à quatre barres croisées avec des ressorts sur leurs côtés latéraux, a été choisie comme
candidat approprié pour un modèle préliminaire plan d’un cou d’oiseau.
Le prototype consiste en un mecanisme en X de Snelson. Les barres sont assemblées selon différents
plans pour éviter les collisions internes. Le manipulateur est entraîné par des câbles parallèles aux res-
sorts et traversant les axes grâce à des perçages. Chaque câble est attaché à un tambour. Le manipulateur
est actionné par deux câbles, ce qui en fait un mécanisme antagoniste, dont on peut contrôler la raideur.
Les pièces structurelles (barres, supports, tambours) sont imprimées en 3D en ABS. Chaque liaison
pivot entre les barres et les axes est construite avec deux roulements qui assurent un centrage long, et
toutes les pièces sont arrêtées axialement avec des colliers d’arbre. Nous avons décidé d’avoir une lon-
gueur de barre transversale de 100 mm et une longueur de barre supérieure de 50 mm. Ces dimensions
sont adaptées à plusieurs jeux de ressorts disponibles, c’est-à-dire que les ressorts considérés sont tou-
jours en tension et ne sont pas trop étendus pour toutes les positions accessibles du manipulateur. Une
fois la longueur et la raideur du ressort définies, le modèle statique est calculé afin d’obtenir la force
d’entrée maximale pour les câbles. Cette force doit être suffisante pour actionner le mécanisme dans un
grand espace de travail et pour résister aux chargements externes. La force appliquée par les câbles est
directement liée au rayon du tambour et au couple du moteur. Le rayon du tambour influe également
sur la vitesse de translation du câble. Un compromis est fait pour avoir des efforts et vitesses de câbles
suffisants.
Deux variateurs interagissent avec un microprocesseur sur lequel est programmé la loi de commande.
Chaque moteur est équipé d’un codeur pour connaître la position réelle du mécanisme. Le bon compor-
tement du mécanisme est assuré par une commande dynamique.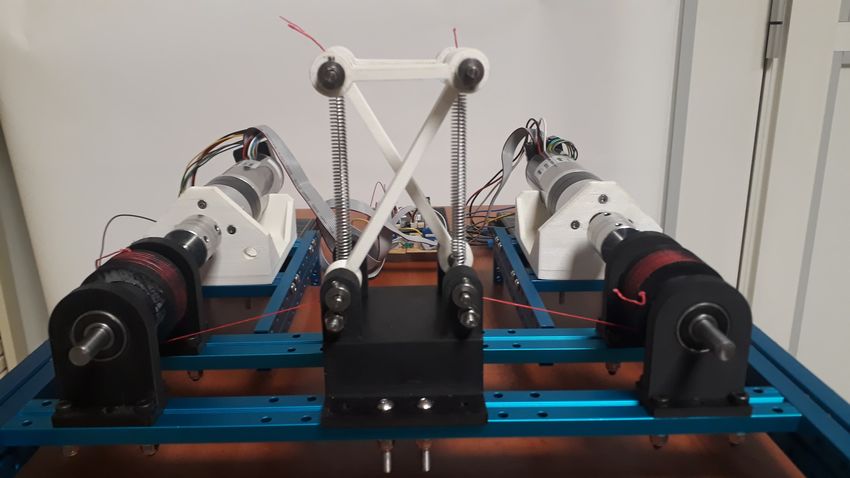
24ème Congrès Français de Mécanique Brest, 26 au 30 Août 2019 Abstract : This paper deals with the building of a 2D tensegrity mechanism. The considered mechanism is derived from the Snelson’s X-shape mechanism and is used as an elementary part of the bird neck modelling. Indeed, an n-dof manipulator can be obtained by stacking in series n X-shape mechanisms. This paper explains the design and building process of a 1-dof prototype, both on hardware and software aspects, and will be used further to have experimental results on the dynamic modelling, control laws and ac- tuation strategy. Keywords : Tensegrity, Robotics, Bio-inspired design, Dynamics 1 Introduction As birds do not have arms, they use their necks as manipulator for a whole set of tasks (feeding, cleaning, hanging, hammering,etc.). The bird necks presents amazing dexterity, dynamic performances, and can be a very good source of inspiration for robotic manipulators. The AVINECK project, involving both biologists and roboticists, aims at building a manipulator that mimics a bird neck. To link both disci- plines, the concept of tensegrity has been chosen, as it is suited to model musculo-skeletal systems, and is also a very good candidate to build light-weight, deformable, high-performance robots. A tensegrity structure is a stable assembly of tensile elements (bars) and compressive elements (cables, springs)[2], [6]. Its use in robotics is quite recent [5],[7], [8], [9], [10], [11], [12], [13]. For this project, the modelling of a bird neck in 2D is done by stacking simple Snelson-X-shape mechanisms [6], which is composed of two rigid bars connected with tendons (springs and or cables). By modifying the cable tension, the equilibrium of the mechanism can be controlled. The modeling of such a mechanism has been done in previous work [14],[15], [16], [17]. This paper focuses on the practical building of a tensegrity proto- type composed of one X-shape mechanism. The modelling of the mechanism is first introduced, then the practical aspects of this work are presented. Indeed, as this mechanism can have high dynamics, all parameters (geometric, mass and inertia, forces) needs to be taken into account and chosen with care. The control of the mechanism is implemented in a microchip that interacts with the motors directly. The building of this prototype is a first step to further work. First, the previous results obtained for the modelling of one X-shape mechanism will be experimentally validated. Then, starting from the same prototype base (motors, electronics), the stacking of several mechanisms can be done. 2 Mechanism modelling An elementary X-shape tensegrity mechanism consists of a four-bar mechanism with crossed links and two pre-tensioned springs, which makes it a class 2 tensegrity mechanism. The links are considered ri- gid, homogeneous and linear and are built such that they are not subject to buckling. They are connected by A, B, C and D, which are assumed to be perfect revolute joints with no friction and damping, see Fig. 1. The mechanism is fixed to the ground by A and B. The two springs connect A and D, and B and C, and are considered massless. The mechanism data are given in Tab. 1. The two crossed links have the same length L and the base and top links have the same length b.
24ème Congrès Français de Mécanique Brest, 26 au 30 Août 2019
C
(3)
α
D
lr , kr
Length Mass Stiffness
Link 1 b m1 -
ll , kl (2) Link 2 L m2 -
()
Link 3 L m3 -
Spring 1 l1 - k1
A
B Spring 2 l2 - k2
Fr
Fl
Figure 1 – Single module. Table 1 – Mechanism data.
The mechanism is actuated by tendons connected at hinges D and C and run through the springs and
applied forces Fl and Fr , that are bounded by Fmax and Fmin and since tendons cannot push, Fmin is
positive. The rotation range of the mechanism is −π < α < π, i.e. the mechanism cannot reach the
flat singular configurations (possible in theory but difficult to achieve in practice due to collisions). The
equation of motion has been derived in previous paper [18] thanks to the Lagrangian equation which is
written in the following form :
M (α)α̈ + C(α)α̇2 + G(α) = Zl (α)Fl + Zr (α)Fr (1)
where M is the mass and inertia term, C the term of coriolis effects and G the term of potential effects
(springs and mass). Zr and Zl corresponds to the lever arm length of forces Fr and Fl with respect to
the instantaneous center of rotation of the top bar (i.e the intersection point of the two crossed bars).
The static equilibrium condition is obtained if the velocities and accelerations are neglicted in equation
(1) and Fl and Fr are considered as constant, which yields :
G(α) = Zr (α)Fr + Zl (α)Fl (2)
The right-hand side of equation (2) is the actuation wrench. The wrench feasible workspace (WFW)
must respect, by definition, the kinematic constraint equations, the static equilibrium (equation (2)) and
the limits for the external forces Fmax and Fmin . Accordingly, it is possible to determine the limits of
the external wrench based on the limits of the external forces as follows :
Γmax (α) = Zl (α)Fmax + Zr (α)Fmin
(3)
Γmin (α) = Zl (α)Fmin + Zr (α)Fmax
The external wrench is bounded by equation (3). Static equilibrium (equation (2)) is obtained for a range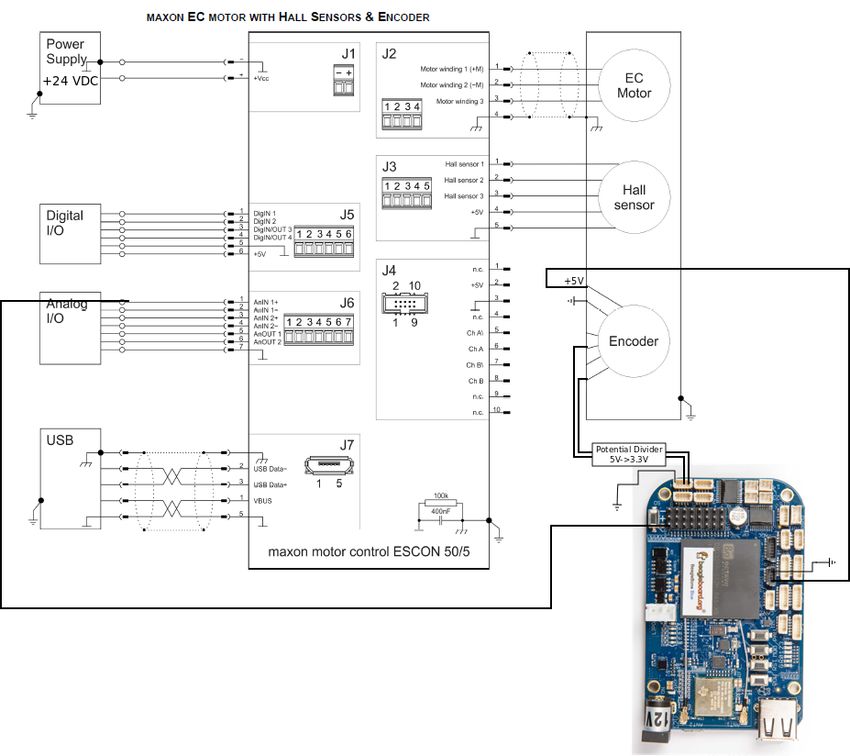
24ème Congrès Français de Mécanique Brest, 26 au 30 Août 2019
Spring Stiffness free length l0 max length lmax
1 90 N/m 0.037 m 0.165 m
2 130 N/m 0.052 m 0.191 m
3 150 N/m 0.047 m 0.152 m
4 190 N/m 0.051 m 0.152 m
Table 2 – Parameters of the different springs available
of α where G is within the feasible wrench bounding curves :
Γmin (α) ≤ G(α) ≤ Γmax (α) (4)
A control law is deduced from the dynamic model, where the Coriolis effects are neglected. For a desired
trajectory (α̈d , α̇d , αd ), the forces are computed such that
M (α) α̈d + kv (α̇d − α̇) + kp (αd − α) + G(α) = Zl (α)Fl + Zr (α)Fr (5)
where kp and kv are the gains. There are infinite number of solutions for this equation, and a solution
that minimizes the sum of the forces is chosen (bearing in mind that the two forces must be positive).
3 Prototyping
3.1 Requirements and dimensions
The dimensions of the prototype must first respect the kinematic constraint which imposes L > b. For
this mechanism, the minimal length of the spring is given by (L − b) and the maximal length by (L + b),
which corresponds to the flat configuration of the mechanism. From a large set of springs available
in the lab (given in table 2), the best dimensions have been determined. The parameters L and b are
chosen such that the maximal number of different springs available can be mounted on the prototype,
allowing different behavior of the mechanism, non-symmetric spring stiffness, etc. We ensured that for
each spring available, the free length l0 was lower than (L − b) and that the maximal stretched length of
the spring lmax was higher than (L + b). From that analysis, the dimensions for L and b has been chosen
such that L = 100 mm and b = 50 mm.
The two chosen motors are two MAXON brushless gearmotor (ECMAX40L/PM42). The datasheets
of the motors are given in Tab. 3. The cables are attached to the motor shaft thanks to a drum, whose
radius needs to be determined. In fact, the radius of the drum links the motor torque to the tension as
well as the motor speed and cable speed. Thus, a radius of 20 mm has been chosen for the drum, which
gives a nominal tension of 155 N , taken as Fmax and a nominal speed of 0.33 m/s for the cables. With
the previous computation of the geometric dimensions and spring stiffness available, the nominal force
Fmin = 0 N , Fmax = 155 N allows the prototype to reach almost the full range of the workspace as
shown on figure 2 (flat configuration is avoided), and the nominal speed permits to go from one extreme
position to an other in less than 0.5 s.
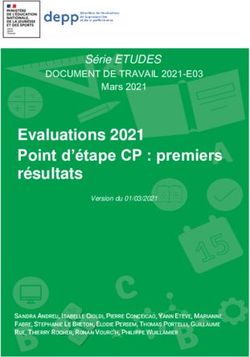
3.2 Mechanical assembly
A first design has been made with CAD software (3DEXPERIENCE), that highlighted the necessity to
use different layers, in order to avoid collisions between bars. Each revolute joint is made around a shaft24ème Congrès Français de Mécanique Brest, 26 au 30 Août 2019
Voltage 24 V CC
Nominal current 4A
No load speed 202 rpm
Nominal Torque 3.10 N m
Nominal speed 160 rpm
Table 3 – Motor data of the motor ECMAX40L/PM42
Figure 2 – Graph showing the maximal and minimal torque and the potential function G for the pro-
totype parameters. All the positions α where G(α) is inside the space bounded by Γmin and Γmax are
inside the Wrench feasible workspace
that links the bars with each other. Each bar has been 3D-printed in ABS. The revolute joint between
the extremity of each bar and the shaft is ensured with two bearings. In fact, as the depth is used, two
bearings ensuring long centering is better than only one bearing which allows swiveling and deformation
of the prototype. Thus, two crossed bars are attached to the base of the mechanism, and two top bars
for the link 3, in order to have more rigidity (see figure 3). Between the top-left and bottom-left shaft
(respectively right), the left spring (resp. right) is attached and pre-tensioned, thus ensuring a stable
equilibrium position of the mechanism (see figure 4). In the middle of each shaft, a small hole is made.
The left cable (resp. right) is attached to the hole of the top shaft, then goes through the hole of bottom
shaft. A last shaft is used as a pulley to reduce friction of the cable passing through the hole, and the
cable is finally winded and attached to the drum. The drum is also 3D-printed and a screw ensures the
proper winding of the cable around it.
3.3 Interfacing and algorithm
A Beaglebone (BB) blue microcontroller is used to control the prototype. This microcontroller offers
a large set of functions and pins, from ADC to PWM and encoders inputs. Each MAXON motor is
controlled thanks to an ESCON 50/5 controller, that ensures speed and torque control of each motor.
ESCON controllers allows a direct linking from the encoder that measures the angular position of the
motor, such that an internal speed control law is possible. In our case, we used a more complex control
law involving dynamics, that is why we needed a micro-computer and an interface between encoders,
the micro-computer and the controller (see figure 6.
The closed loop is presented on the Figure 5. Given a desired trajectory (α̈d , α̇d , αd ) and the current
position α, the forces to be applied are computed with the dynamic control law provided in equation (5).24ème Congrès Français de Mécanique Brest, 26 au 30 Août 2019
Figure 3 – Picture of the prototype
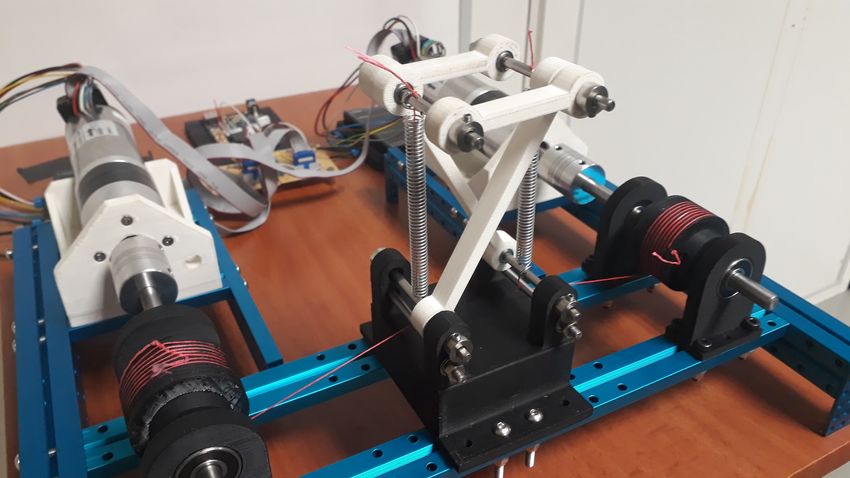
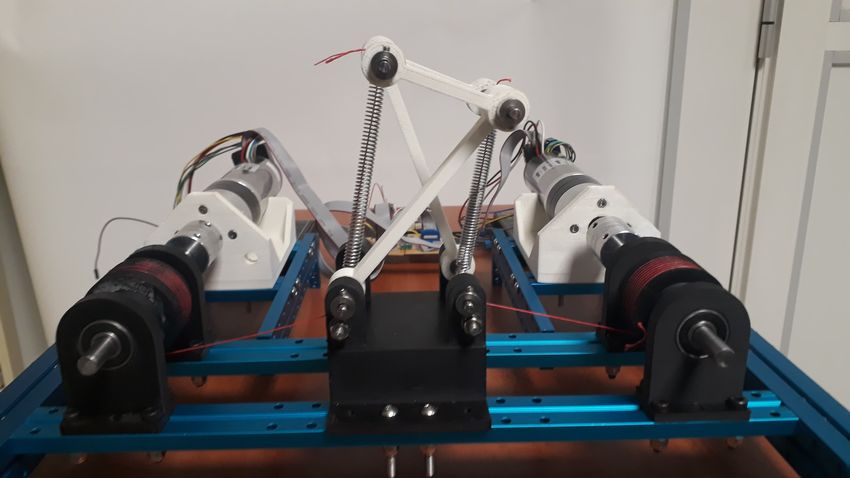
Figure 4 – Front view of the rest equilibrium position of the prototype (left) and a given equilibrium
position of the prototype with force actuation (right)24ème Congrès Français de Mécanique Brest, 26 au 30 Août 2019
α̈d , α̇d , αd
- fl , fr sl , sr
Dynamic Model - PWM - Motors
-
Γ
α
pl , pr ll , lr
Tensegrity
Converter Encoders
Mechanism
Figure 5 – Closed loop
The velocity α̇ is also used, thus it must be measured or calculated. These forces are converted in PWM
signals sl , sr which are given to the motors (thanks to the ESCON controller). Thus, the two motors apply
a torque Γ on the drum, which is linked to the torque applied on the mechanism thanks to drum radius
and right-hand-side part of equation (1). The lengths ll , lr of the two cables are linked to the positions
of the motors pl , pr , which are the outputs of the encoders. The encoders are directly connected to the
beaglebone, with some voltage adaptation. The inclination α of the tensegrity mechanism is deduced
from pl and pr , the dimensions of the mechanism and the drum.
The algorithm on the Beaglebone is written in C language. The Robot Control Library is used to control
the inputs/outputs of the Beaglebone.
4 Conclusion and future work
This article presented the design, the assembly and control of a tensegrity mechanism prototype. After
a first modeling of the Snelson X-shape mechanism, a first design has been made. Using 3D-printer
and standard parts, a Snelson X-shape has been built. Thanks to cable actuation, forces are applied on
the mechanism and modify its equilibrium configuration. The computation of the input forces in made
thanks to a dynamic control law. This control law and the PWM signal to motors is provided through both
a Beaglebone blue microchip and motor controllers. The real position of the mechanism to be compared
with the desired trajectory is computed with motor encoders that measures directly the position of the
drum.
This first prototype will be used to validate modeling results on a single mechanism, and the dynamic
control law. Future work will be to stack at least two mechanisms, and study different actuation strategies
(symmetric or non symmetric cable, side-routed or strut-routed cables) and find the best choice in terms
of nature mimicking and performances (workspace, dynamics). This work will be extend to N stacked
mechanism, first in 2D, then in 3D.
Références
[1] R. B. Fuller, Tensile-integrity structures, United States Patent 3063521,1962
[2] Motro, R. Tensegrity systems : the state of the art, Int. J. of Space Structures, 7 (2), pp 75–83, 1992
[3] Skelton, R. and de Oliveira, M., Tensegrity Systems. Springer, 2009
[4] S. Levin, The tensegrity-truss as a model for spinal mechanics : biotensegrity, J. of Mechanics in
Medicine and Biology, Vol. 2(3), 200224ème Congrès Français de Mécanique Brest, 26 au 30 Août 2019 Figure 6 – Layout of the interface between the micro-computer, the controller, motor and encoder. This scheme is reproduced for both motors, connecting on the same beaglebone
24ème Congrès Français de Mécanique Brest, 26 au 30 Août 2019
[5] P. Wenger and D. Chablat, Kinetostatic Analysis and Solution Classification of a Planar Tensegrity
Mechanism, proc. 7th. Int. Workshop on Comp. Kinematics, Springer, ISBN 978-3-319-60867-9,
pp422-431, 2017.
[6] K. Snelson, 1965, Continuous Tension, Discontinuous Compression Structures, US Patent No.
3,169,611
[7] M. Arsenault and C. M. Gosselin, Kinematic, static and dynamic analysis of a planar 2-dof tensegrity
mechanism, Mech. and Mach. Theory, Vol. 41(9), 1072-1089, 2006
[8] C. Crane, J. Bayat, V. Vikas, R. Roberts, Kinematic analysis of a planar tensegrity mechanism with
pres-stressed springs, in Advances in Robot Kinematics : analysis and design, pp 419-427, J. Lenar-
cic and P. Wenger (Eds), Springer (2008)
[9] Q. Boehler, M. Vedrines, S. Abdelaziz, P. Poignet, P. Renaud, Design and evaluation of a novel
variable stiffness spherical joint with application to MR-compatible robot design. In Robotics and
Automation (ICRA), 2016 IEEE International Conference on (pp. 661-667).
[10] D. Bakker, D. Matsuura, Y. Takeda, J. Herder, Design of an environmentally interactive continuum
manipulator, Proc.14th World Congress in Mechanism and Machine Science, IFToMM’2015, Tai-
pei, Taiwan, 2015
[11] J. Rieffel and J.B. Mouret, Adaptive and Resilient Soft Tensegrity Robots, Soft Robotics 2018 Jun
1 ; 5(3) : 318–329.
[12] V. Baum, T. Kaufhold, I. Zeidis, K. Zimmermann, Spherical mobile robot based on a tensegrity
structure with curved compressed members. AIM 2016 : 1509-1514.
[13] M Vespignani, J. Friesen, V. SunSpiral, J. Bruce , Design of superball v2, a compliant tensegrity
robot for absorbing large impacts. 2018 IEEE/RSJ International Conference on Intelligent Robots
and Systems.
[14] A. Van Riesen, M. Furet, C. Chevallereau, P. Wenger, Dynamic Analysis and Control of an Antago-
nistically Actuated Tensegrity Mechanism, in Romansy 22 – Robot Design, Dynamics and Control,
Spinger, ISBN : 978-3-319-78962-0, 2018
[15] M. Furet, A. Van Riesen, C. Chevallereau, P. Wenger, Optimal Design of Tensegrity Mechanisms
Used in a Bird Neck Model, in EuCoMeS2018 : Proceedings of the 7th European Conference on
Mechanism Science, Springer, ISBN : 978-3-319-98019-95
[16] M. Furet, M. Lett, P. Wenger, Kinematic analysis of planar tensegrity 2-X manipulators, Proc. 16th
Internat ional Symposium on Advances in Robot Kinematics, Bologna, Italia, 2018
[17] M. Furet and P. Wenger, Workspace and cuspidality analysis of a 2-X planar manipulator, Proc.
4th IFToMM Symposium on Mechanism Design for Robotics, Udine, Italia, 2018
[18] B. Fasquelle, M. Furet, C. Chevallereau, P. Wenger, Dynamic modeling and control of a tensegrity
manipulator mimicking a bird neck, 15th IFToMM World Congress, Krakow, Poland, 2019Vous pouvez aussi lire