Séminaire Rohde & Schwarz Evolutions du radar d'hier à aujourd'hui 19 Mars 2019 Philippe Eudeline - Rohde & Schwarz
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
Séminaire Rohde & Schwarz
Evolutions du radar d’hier à
aujourd’hui
19 Mars 2019
Philippe Eudeline
PHILIPPE EUDELINE •Directeur Innovation •Thales Land and Air Systems •Professeur Associé •Université de Rouen •ESIGELEC •Président de Normandie AeroEspace
HISTORIQUE DU RADAR
DEFINITION :
On désigne sous le nom de radar (Radio Detection and Ranging) un
système qui illumine une portion de l ’espace avec une onde
électromagnétique, et reçoit les ondes réfléchies par les objets qui
s ’y trouvent, ce qui leur permet de détecter leur existence et de
déterminer certaines caractéristiques de ces objets.
Ces caractéristiques sont variables : il peut s ’agir de la position
horizontale des objets, de leur altitude, de leur vitesse et parfois de
leur forme.
3
Principes de base du Radar
Antenne Cible
Illumination
Émetteur
Écho
Récepteur
-Émission d’une onde électromagnétique à très haute fréquence
-La cible réfléchit une partie de l’onde électromagnétique
-Le Récepteur capte l’onde réfléchie par la cible
-Un traitement de signal approprié permet de caractériser
- Position de la cible
- Vitesse de la cible
- Forme de la cible
4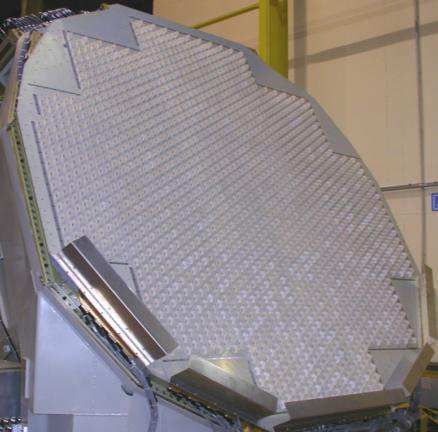
HISTORIQUE DU RADAR
UN PEU D ’HISTOIRE
Ce n ’est qu’en Novembre 1940 que le mot Radar a été
officiellement introduit par la Marine Nationale des Etats Unis,
bien que des appareils de type Radar existaient depuis
longtemps déjà mais sous d ’autres appellations (Radio Echo
Equipment aux Etats Unis et Détection Electro Magnétique DEM
en France).
Le Radar n ’a pas vu le jour soudainement mais petit à petit
grâce à l ’action conjuguée d ’éminents scientifiques de
nombreux pays.
5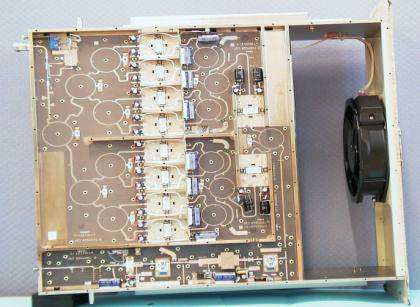
La plus grande partie de la vie scientifique de James
Clerck Maxwell, brillant scientifique britannique, a été
consacrée à l‘électricité. Sa plus grande contribution
est le développement et la formulation mathématiques
d’un ensemble de vingt équations différentielles à
vingt variables, plus tard réduites aux quatre lois de
l’électromagnétisme. Ces équations, désormais
connues sous le nom d‘équations de Maxwell, sont
présentées la première fois à la Royal Society en 1864
et décrivent le comportement et les relations du Naissance 13 juin 1831
champ électromagnétique ainsi que son interaction Édimbourg, Écosse
Décès 5 novembre 1879
avec la matière. L‘équation d’onde électromagnétique Cambridge, Angleterre
de Maxwell prévoit l'existence d'une onde associée
Nationalité écossaise
aux oscillations des champs électrique et magnétique,
se déplaçant dans le vide.
6
Heinrich Rudolph Hertz prouve expérimentalement en
1884 que la lumière est une onde électromagnétique
qui obéit à la théorie de Maxwell. À Karlsruhe, il utilise
un oscillateur (dit oscillateur de Hertz, composé d'un
éclateur agissant entre deux sphères creuses en
laiton) et met en évidence l'existence d'autres ondes
électromagnétiques, celles-là non visibles. Il démontra
que ces nouvelles ondes étaient susceptibles elles
aussi de se diffracter, de se réfracter et de se polariser.
Le 13 novembre 1886, il effectua la première liaison
par faisceau hertzien entre un émetteur et un
récepteur. En 1888, il montre finalement que les
ondes électromagnétiques sont réfléchies par les
Naissance 22 février 1857
surfaces métalliques, ce qui ouvre la voie au radar.
Hambourg
Au début du XXe siècle, le développement de la radio Décès 1er janvier 1894 Bonn
et de la TSF (par Marconi, entre autres), donne lieu à
celui des antennes. Celles-ci sont fondamentales dans Nationalité allemande
l’invention du radar puisqu’il faut un émetteur et un
récepteur.
7
Hülsmeyer travailla chez Siemens-Schuckert environ deux ans, en
particulier sur les équipements électriques pour navires. Après la
mort d'un ami dans une collision entre navires, il quitta la
compagnie pour aller à Dusseldorf avec en tête une idée pour un
appareil de détection des obstacles maritimes à l'aide des ondes
radio. Il y travailla seul et en 1904, il dépose un brevet .
Son « Telemobiloskop » utilise un émetteur à éclateur pour
produire une onde radio. Celle-ci est orientée en direction par une
antenne multipolaire. L’onde frappant un obstacle métallique,
comme un navire, est en partie réfléchie vers la source où deux
antennes dipolaires servent de récepteur qui sonne une cloche
lors de détection. Ce système pouvait repérer l’azimut Christian Hülsmeyer
approximatif des navires jusqu’à 3 kilomètres, sans pouvoir (1881-1957)
déterminer la distance. La même année, Hülsmeyer utilisa son
« Telemobiloscope » au sommet d’une tour et fit un sondage
vertical pour trouver l’angle d’élévation du retour maximal, ce qui
donnait, par triangulation avec la courbe terrestre, la distance
approximative du navire.
.
8
La première démonstration publique du 'telemobiloscope' a eu lieu le 18 Mai 1904
au Pont Hohenzollern à Cologne. Dès qu’un navire approchait sur la rivière la
cloche sonnait. La sonnerie disparaissait dès que le navire changeait de direction
et quittait l’axe de l’antenne . Tous les tests réalisés furent positifs . La presse et
l’opinion public étaient très favorables à cette invention mais malheureusement les
autorités navales et les industriels n’étaient pas intéressés .
A gauche l’antenne , au milieu le récepteur et à droite l’émetteur .
9
HISTORIQUE DU RADAR
Hülsmeyer donna une démonstration en Allemagne et aux
Pays Bas. Cependant, la marine allemande ne fut pas
impressionnée, ni aucune des compagnies maritimes
approchées. Un des problèmes était le fait qu'en cas de trafic
maritime intense autour de l'émetteur, le signal de retour
subissait de multiples réflexions. De plus, la portée était
limitée, plus faible en fait que la portée des bruits de moteurs
d'un navire, et l'appareil assez difficile d'utilisation. Il se remit
au travail et le 16 janvier 1906, il obtint un second brevet
(américain celui-là) pour une version améliorée qui permettait
de filtrer les échos parasites
10LE TITANIC
Le RMS Titanic est un paquebot transatlantique britannique de
la White Star Line construit sous l'initiative de Joseph Bruce
Ismay en 1907. La construction débute en 1909 à Belfast et se
termine en 1912. C'est le plus luxueux et le plus grand
paquebot jamais construit au moment de son lancement.Le
Titanic est pourvu de seize compartiments étanches servant à
protéger le navire d'avaries importantes. Les médias lui ont
ainsi donné une réputation de navire fiable.
Lors de son voyage inaugural de Southampton à New York il
percute un iceberg le 14 avril 1912 à 23 h 40 et coule le 15
avril 1912 à 2 h 20 au large de Terre Neuve
11Entre 1 490 et 1 520 personnes périssent, ce qui fait de cet
événement une des plus grandes catastrophes maritimes en temps
de paix et la plus grande pour l'époque. Le drame met en évidence
les faiblesses des navires de l'époque concernant le nombre de
moyens de sauvetage et les carences des procédures
d'urgence. Des conférences internationales sont par la suite
organisées, entraînant des changements de réglementation encore
en vigueur un siècle après la catastrophe.
LE TITANIC
12Albert W. Hull, né le 19 avril 1880 à Southington, (Connecticut) et mort le 22 janvier 1966, est un physicien en électronique américain. Il étudia les tubes à vide au laboratoire de recherche de la General Electric (GERL) et il est surtout connu pour le développement du magnétron. Ces premières recherches amenèrent Hull à développer le premier magnétron à partir de 1920. Il publia ses résultats en 1921. Son appareil avait une anode cylindrique coaxiale à une cathode, le tout plongé dans un champ magnétique axial produit par une bobine externe. Il testa son magnétron comme amplificateur dans un récepteur radio et comme un oscillateur de basse fréquence. En 1925, un de ses magnétrons développé à GERL avait une puissance de 15 kW et une fréquence de 20 kHz. Hull pensait que sa découverte servirait comme convertisseur de puissance mais l'avenir démontra qu'il serait surtout utilisé en télécommunications et dans les radars .
HISTORIQUE DU RADAR
En 1935 les Français Ponte et Guitton installaient un système de détection
d ’iceberg sur le paquebot Normandie. Tous ces systèmes utilisaient des
ondes continues (émission permanente d ’un signal non modulé).
Maurice Ponte
14HISTORIQUE DU RADAR
En Allemagne: les meilleurs radars, mais l’Etat-Major tarde à suivre
• En Allemagne, Rudolf Kühnhold, directeur du laboratoire de Radar Freya,
télétransmissions de la Marine, travaille dès 1933 sur la détection
électromagnétique. Il s’associe avec la GEMA, une société privée
créée en 1934. Fin 1933, la GEMA teste avec succès un système
de détection de navires en ondes continues utilisant un
magnétron de la firme néerlandaise Philips, délivrant 40 W sur λ
= 48 cm .
Radar Seeakt,HISTORIQUE DU RADAR
• L’équipe réoriente ses recherches vers la surveillance
aérienne. Fin 1936, une démonstration de détection
d’avions à 80 km est couronnée de succès, et la
Luftwaffe commande 12 exemplaires. En 1937, la
GEMA finalise les deux versions de son radar longue
portée à impulsions, le Freya pour la surveillance
aérienne (λ = 2,4 m), et le Seeakt, version embarquée
sur navire (λ = 80 cm),
• Mais la bureaucratie militaire retarde le projet, et en
1939, l’Allemagne entre en guerre avec seulement 6
Freya, alors que l’appareil aurait pu être fabriqué en
Radar Würzburg,
série dès 1937 ! La situation sera débloquée à partir de
juillet 1940, et plus de 2.000 Freya de différentes
versions seront produits jusqu’en 1945.HISTORIQUE DU RADAR
Un grand changement a eu lieu en 1935 après la publication de
deux mémorandums de Sir R. WATSON-WATT qui préconisait :
– L ’utilisation d ’ondes métriques.
– L ’utilisation d ’une émission d ’impulsions courtes et
espacées qui permettait une mesure directe de la distance
(radiale) des objets détectés par la mesure de l ’intervalle
du temps séparant l ’émission de la réception.
17Angleterre Chain Home
En 1937, les premières stations étaient
opérationnelles et le système mis à l'épreuve. Les
résultats furent concluants et vingt autres
stations furent commandées. Au début de la
Seconde Guerre Mondiale , 19 étaient construites Tour Marconi de la Chain Home
et prêtes à assumer un rôle décisif dans la
Bataille d’Angleterre , en 1940 où elles se sont
avérées capables de donner des alertes
avancées des raids de la Luftwaffe . Les stations
Chain Home ont été construites le long de la côte
britannique, au début au sud et à l'est de
l‘Angleterre , puis sur l'ensemble de la côte, y
compris sur les îles Shetland . Il y avait cinquante
stations à la fin de la guerre.
18HISTORIQUE DU RADAR
ETATS UNIS
À l’automne 1922, Albert H. Taylor et Leo C. Young , du Naval
Research Laboratory (NRL) aux États-Unis, effectuaient des essais
de communication radio dans le fleuve Potomac . Ils
remarquèrent que les bateaux en bois traversant la trajectoire de
leur signal d’onde continu causaient des interférences,
redécouvrant ainsi le même principe qu’Hülfsmeyer. En 1930,
Lawrence A. Hyland du NRL détecta le passage d’un avion à l’aide
d’une interférence dans le signal d’une onde continue de 33 MHz
(longueur d’onde d’environ 10 mètres). Ces deux expériences
montraient la possibilité de détection mais ne fournissaient pas la
position ni la vitesse de la cible.
19Pearl Harbor
L'attaque sur Pearl Harbor, base navale américaine située sur l’île
d’Oahu, dans l’archipel de l‘Etat américain d’Hawaï, au cœur de l’océan
Pacifique , fut lancée par surprise le matin du dimanche 7 Décembre
1941 par le Service aérien de la marine impériale japonaise contre la
flotte américaine du Pacifique dans le port et d’autres forces qui
stationnaient aux alentours. Cette attaque s’inscrit dans la politique
d’expansion impériale. L’anéantissement de la principale flotte de
l‘United States Navy devait permettre à l’empire du Soleil levant d’établir
sa sphère de co-prospérité de la grande Asie orientale . Le Quartier-
général impérial souhaitait également répondre aux sanctions
économiques prises par Washington en juillet 1941 après l‘invasion de la
Chine et celle de l’Indochine française par l‘armée impériale japonaise .
20Pearl Harbor
À l'issue de l'attaque, conduite en deux vagues aériennes, les pertes
américaines furent importantes : 2 403 morts et 1 178 blessés. Quatre
navires de ligne, trois croiseurs, trois destroyers et 188 avions furent
détruits. Cependant, beaucoup de navires purent être remis en état
dans les mois qui suivirent, et les trois porte-avions américains du
Pacifique, alors absents de Pearl Harbor, échappèrent à l'attaque.
Les Japonais perdirent 64 hommes, 29 avions et cinq sous-marin de
poche; un marin fut capturé.
Le général Short estimait que le danger le plus immédiat pour les
terrains d'aviation était le sabotage, et avait par conséquent ordonné
que les avions soient concentrés en des endroits faciles à surveiller,
situation qui facilita leur destruction par l'attaque aérienne ;
21Les premiers radars aéroportés
Le radar aéroporté posait à la fois des problèmes technologiques – comment
miniaturiser l’appareil – et « psychologiques » - comment accoutumer les
pilotes de chasse à son usage.
Chez Telefunken, Wilhelm Runge conçoit un prototype en avril 1940, avec 16
dipôles sur le nez de l’avion (ce qui réduit la vitesse de 10 km/h). En raison de
résistances chez les pilotes, ce radar n’entre en service qu’en avril 1941.
Plusieurs versions (FuMG 202 à 220) sortiront sous le nom de Lichtenstein. 400
exemplaires furent produits, surtout pour les chasseurs de nuit Junker 88, qui
l’utilisaient en approche finale après guidage par les radars de la ligne
Kammhuber.
22Les premiers radars aéroportés
Aux Etats Unis Edouard George Bowen transforme son
prototype en radar de recherche air-mer. Ce radar
aéroporté, appelé ASV (Airborne Research for Surface
Vessels) sera produit en série à partir de l’automne 1939
et équipera les avions du Coastal Command à partir de
septembre 1940. Les radars ASV seront d’une grande
utilité dans la lutte contre les sous-marins allemands à
partir du printemps 1941.
.
23Les premiers radars aéroportés
Des recherches parallèles sont confiées début 1940 à la société
industrielle EMI. Le premier prototype d’EMI, le AI Mark IV,
testé à partir de juillet 1940, se révèle très supérieur aux
modèles de Bowen. Le AI Mark IV est mis en production et
monté sur des avions à partir d’octobre 1940. Les premiers
résultats probants au combat apparaissent en mars 1941, soit
six mois après le début du « Blitz » de l’aviation allemande sur
Londres (qui dura de septembre 1940 à mai 1941). Les anglais
poursuivront la gamme des AI jusqu’au Mark 9, avant d’adopter
le SCR-720 américain centimétrique, rebaptisé AI Mark 10.
24Les premiers radars aéroportés
Radar Hydravion Short Edward George
Lichtenstein sur Sunderland équipé Bowen
un Junker 88, d'antennes ASV (à
l'arrière , verticales et
latérales)
25Une nouvelle étape est franchie à la fin des années 1950 à la
suite de la publication d ’un ouvrage du Britannique PA
Woodward. Il préconise de moduler (en phase ou en fréquence)
l ’onde émise.
Ceci permet, en utilisant un récepteur dit « adapté », de
reconnaître le signal reçu même s ’il est noyé dans un bruit
parasite très puissant et de mesurer le décalage émission-
réception avec une excellente qualité. Cette innovation a permis
d ’améliorer de façon très importante la portée des radars (dits à
impulsions codées).
C ’est aussi à cette époque qu’a été introduit, pour mesurer la
vitesse des cibles le filtrage doppler. Mais il a fallu attendre
l ’arrivée des mémoires numériques MOS pour pouvoir enfin
effectuer des mesures Doppler performantes.
26HISTORIQUE DU RADAR
Le Balayage Electronique
Le besoin de pouvoir modifier quasi instantanément l ’optique
d ’une antenne radar pour obtenir à volonté n ’importe quelle
forme de faisceau (large, étroit, monopulse, avec une crevasse
dans la direction d ’un brouilleur) a conduit à développer des
antennes composées de milliers de sources rayonnantes dont la
phase du signal émis est commandée électroniquement.
Des investissements technologiques très importants sont
réalisés chaque année pour améliorer les performances des
composants , pour réduire l’encombrement et améliorer la
fiabilité . On doit à ces efforts technologique l’émergence des
radars Multi-Fonctions
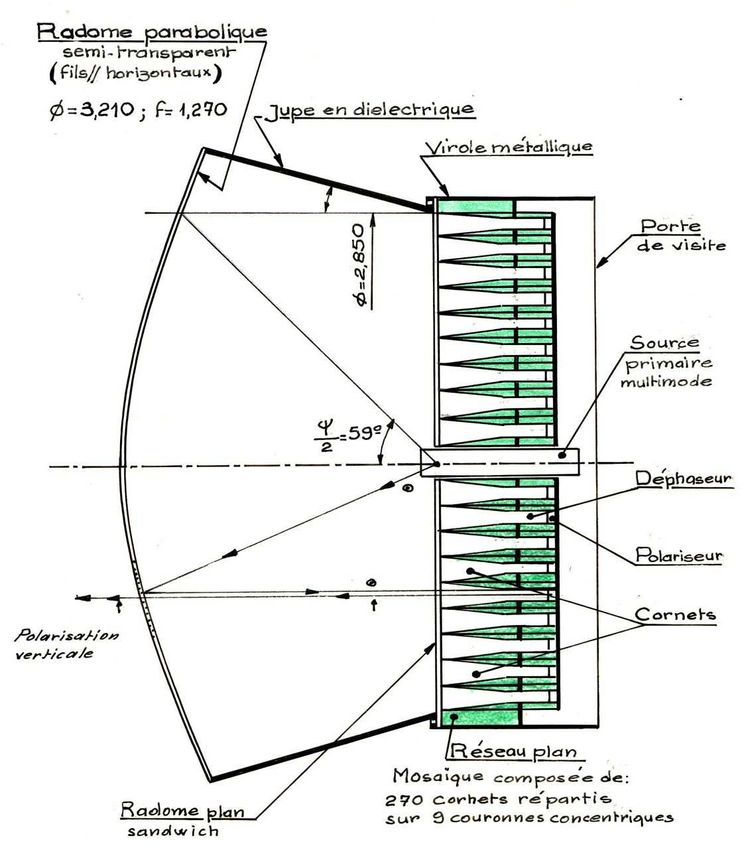
271972
Le premier Radar Français à Balayage électronique :
L’ Artois
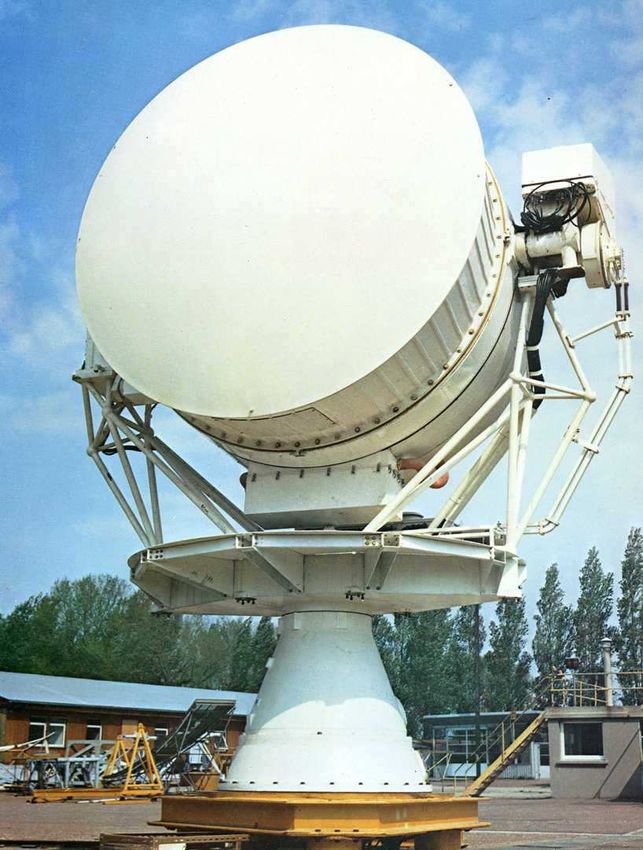
28Radar à Balayage électronique passif :
Lentille réseau
déphaseur
29L’émission état solide
L ’apparition sur le marché, au début des années 80,
des premiers composants (transistors) de puissance a
permis le développement de nouveaux types
d ’émetteurs. Les américains ont été les premiers à
mettre au point ces émetteurs et leur ont donné le
nom de Solid State Transmitter qui a été traduit
littéralement par Émetteurs État Solide. Depuis cette
date de grands progrès ont été réalisés pour
développer des composants de plus en plus puissants
et tous les radars de nouvelle génération sont équipés
de tels émetteurs.
30L’émission état solide
Module Émission 1400 W
EMETTEUR 18 kW Bande S
31Les Antennes à Balayage Electronique Actives ( à partir de 1990)
Afin de pouvoir suivre plusieurs cibles en même
temps et grâce au développement de composants
intégrés MMIC ( Microwave Monolitics Integrated
Circuits ) des antennes dites actives ( disposant
d’un émetteur/ Récepteur sur chaque dipôle
rayonnant ) on été développées .
Ces antennes sont équipées de plusieurs milliers
(1000 à 10000 sources rayonnantes )
32Les Antennes à Balayage Electronique Actives
33Antennes à 4 panneaux fixes
Radar Bande X
Radar Bande S
Mat Intégré
Radar Multifonctions pour application Navale
34Radar Passif Un radar passif est un Radar qui peut détecter et suivre un objet en utilisant les réflexions de sources étrangères au système telles que des stations de radiodiffusion ou de radiocommunication. C'est un cas particulier du radar bistatique qui peut utiliser soit une source faisant partie de son système, soit une source étrangère. Dans le cas d'un radar passif, il n'y a pas d'émetteur dédié. À la place, le récepteur utilise un émetteur d'opportunité — ne faisant pas partie de son système — et mesure la différence de marche entre le signal qu'il reçoit directement de l'émetteur, et le signal réfléchi par la cible. Cette mesure permet de déterminer la « distance bistatique » de l'objet qui se présente sous forme d'une ellipse, l'émetteur et le récepteur occupant respectivement les foyers de l'ellipse. En plus de la distance bistatique, un radar passif permet de mesurer le décalage de fréquence de l'écho par effet Doppler et dans certaines configurations son azimut. Ces informations étant connues on peut calculer la position, le cap et la vitesse de la cible. Dans certains cas on peut utiliser plusieurs émetteurs et/ou plusieurs récepteurs et augmenter ainsi la pertinence et la précision de la mesure (multistatisme). On peut noter que si l'on dispose de plus de trois géométries différentes de couples émetteur-récepteur non liées, alors le vecteur vitesse obtenu est un vecteur vitesse absolu et non un simple vecteur radial comme dans un radar monostatique ou bistatique.
Radar Passif
Principales sources utilisables
On a développé des systèmes de radars passifs qui utilisent
chacune de ces sources :
• télévision analogique,
• radio FM,
• stations terrestres de GSM,
• diffusion audionumérique,
• diffusion vidéonumérique,
• émetteurs terrestres de TV haute définition en Amérique
du Nord.Radar passif
Avantages
• Pas de nécessité d'allocation spécifique de fréquences.
• Mise en œuvre indétectable
• Faible investissement de départ.
• Faible coût de maintien en condition opérationnelle dû à l'absence
d'émetteur et de pièces mobiles.
• Installation discrète et de petite dimension pouvant donc être
envisagée dans des endroits inaccessibles aux radars
conventionnels (parcs naturels, milieux urbains...).
• Bonne efficacité sur les cibles à très basse altitude ou masquées en
raison des bandes de fréquence très basses et des géométries
multistatiques utilisées.
• Efficacité contre les avions furtifs pour les mêmes raisons.
• Rafraîchissements rapides, en général de l'ordre d'une seconde.
• Difficile à brouiller à distance (bistatique) voire impossible
(multistatique).
• Bonne résistance aux missiles anti-radarRadar passif Inconvénients • Technologie récente encore en pleine évolution. • Dépendance de sources extérieures au système. • Complexe à mettre en œuvre. • Limité à la 2D
Les Radar Numérique Thales a lancé la production du SEA FIRE, un radar numérique destiné à équiper les Frégates de taille intermédiaire Bénéficiant de l’expertise de Thales en matière de Big Data et de cyber sécurité, ce Radar fonctionne en bande S, le SEA FIRE est muni de quatre antennes actives [AESA] entièrement numériques à panneaux fixes, lesquelles lui permettront « d’augmenter significativement les performances de détection et de poursuite avec une couverture sans masque sur 360°en azimuth et jusqu’à 90°en élévation . »
Les Radar Numérique Performances Le SEA FIRE sera en mesure de suivre simultanément plus de 800 pistes et de repérer des aéronefs ou des missiles évoluant à 500 km de distance ou bien des navires de surfaces navigant sur une distance de 80 km. Il pourra être utilisé comme radar de conduite de tur pour les missiles surface-air Aster 30 ou comme radar météo. Le SEA FIRE répond aux besoins de différentes missions depuis l’autodéfense du navire jusqu’à la défense aérienne étendue (conduite de tir pour les missiles actuels et futurs) , tout en étant opérationnel dans des environnements complexes en zone littorale ou en présence de brouillage intense » contre des menaces « conventionnelles, asymétriques ou émergentes. »
Conclusions Les équations définies par Maxwell et mises en œuvre par Christian Hülsmeyer et par Sir Robert Watson- Watt sont immuables et n’évolueront pas Par contre les technologies évoluent en permanence et apportent de nouvelles solutions pour améliorer sans cesse les capacités de détection des Radar Nous entrons dans l’ère du Radar Numérique avec tous les avantages du numérique mais aussi tous ces risques
Merci pour votre attention
Vous pouvez aussi lire