Utilisation de l'inférence Bayésienne pour la génération de ShakeMaps - RESIF
←
→
Transcription du contenu de la page
Si votre navigateur ne rend pas la page correctement, lisez s'il vous plaît le contenu de la page ci-dessous
Utilisation de l’inférence Bayésienne
pour la génération de ShakeMaps
2nd Workshop RESIF – Aléa sismique & Shakemaps
Shakemap – Alternatives méthodologiques
Pierre Gehl – BRGM
Avec
John Douglas – University of Strathclyde
Dina D’Ayala – University College London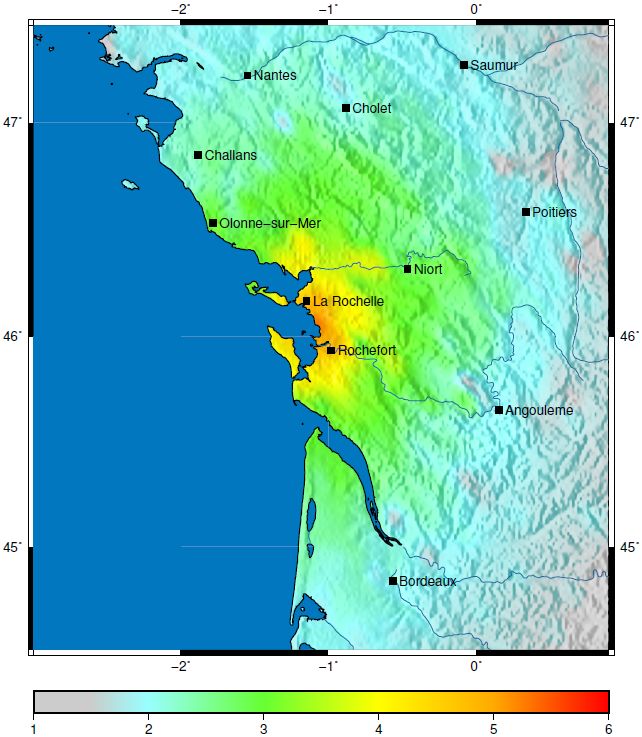
Principe de l’approche bayésienne
Réseau Bayésien Inférence bayésienne
Noeuds racines Distribution
X1 X2 – Probabilité postérieure X1 X2
marginale de X1
Noeuds descendants
X4 X3 – Probabilité X4 X3
conditionnelle
X5 X5
Observation
> Application à la génération d’une Shakemap
Distribution a priori Observations Distribution postérieure
Paramètres - Enregistrements par Mise à jour de la
probabilistes prédits des stations distribution des paramètres
par une loi - Intensités ressenties par inférence
d’atténuation
2nd Workshop RESIF, Montpellier, 31 janvier 2018 >2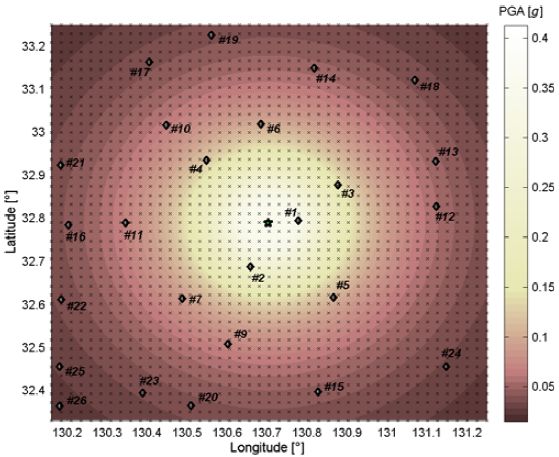
Principe de l’approche bayésienne
> Grille de 3x3 points
> 2 observations (e.g. PGA):
> Yobs1: 85% de l’estimation a priori
> Yobs2: 110% de l’estimation a priori
Terme d’erreur
> Réseau Bayésien correspondant: inter-événement
Observations
Paramètres sur
la grille
Corrélation spatiale
des termes d’erreur
intra-événement
2nd Workshop RESIF, Montpellier, 31 janvier 2018 >3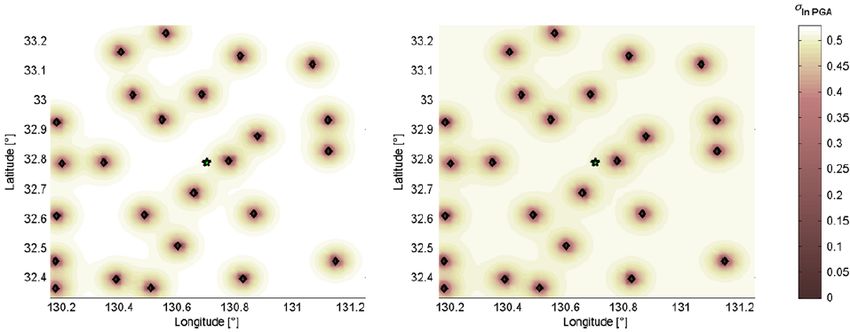
Principe de l’approche bayésienne
Terme local (intra-
événement)
Terme global
(inter-événement)
Terme local (intra-
événement)
2nd Workshop RESIF, Montpellier, 31 janvier 2018 >4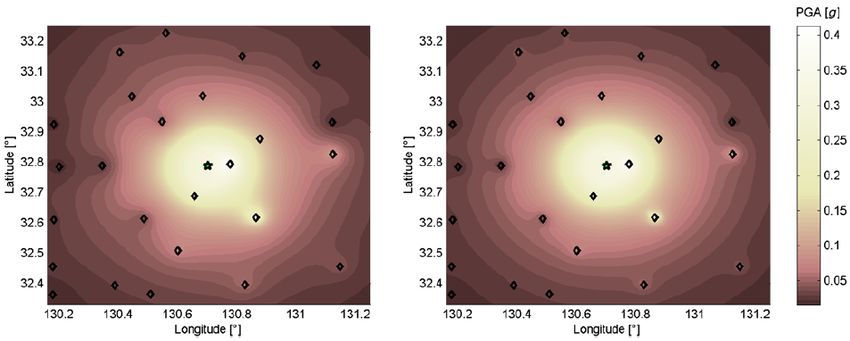
Traitement de plusieurs types d’observations
MMI
GMICE
PGA
GMPE
Corrélation
spatiale PGA
Corrélation
spatiale SA(T)
GMPE
SA(T)
2nd Workshop RESIF, Montpellier, 31 janvier 2018 >5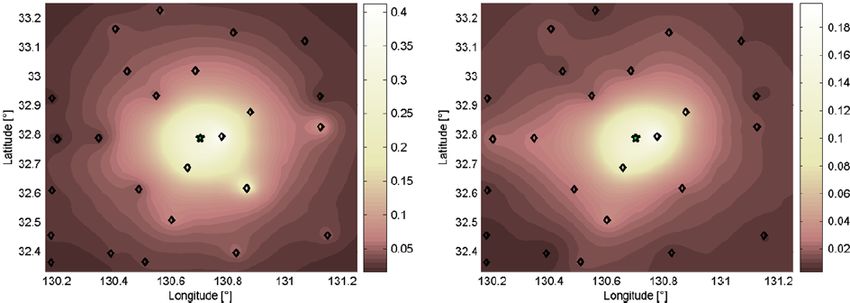
Validation – Séisme Mw 6.2 Kumamoto (2016)
PGA [g] SA(1.0s) [g]
> Grille de 48x48 points (100x100 km2)
> 26 stations sismiques
> Estimation conjointe de PGA et SA(1.0s)
> Résultats quasi-identiques à l’approche ShakeMap USGS
> Traitement rigoureux de l’incertitude (équilibre entre les variabilités
inter- et intra-événement)
cf. Gehl et al. (2017) pour la validation analytique
2nd Workshop RESIF, Montpellier, 31 janvier 2018 >6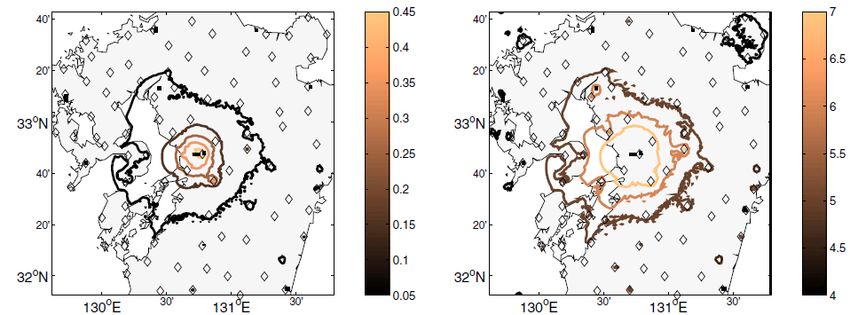
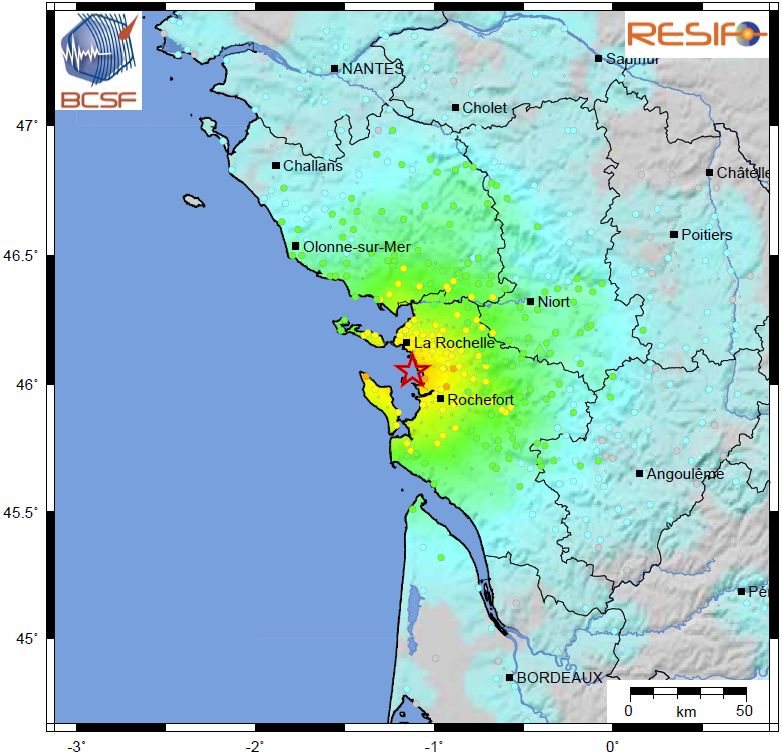
Test – Séisme ML 5.0 La Rochelle (2016)
> Peu d’observations intrumentales (2 stations)
> Nombreux témoignages (370 observations utilisées)
> ShakeMap en Intensité:
2nd Workshop RESIF, Montpellier, 31 janvier 2018 >7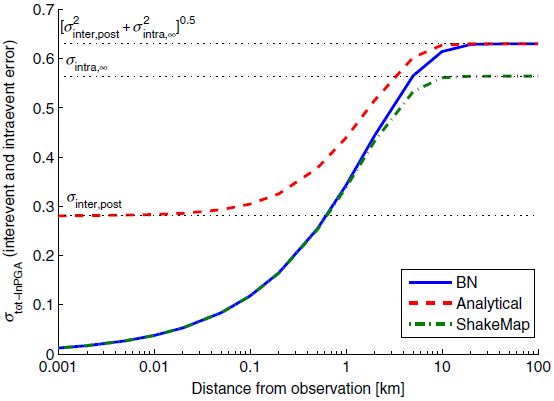
Test – Séisme ML 5.0 La Rochelle (2016)
> ShakeMap PGA:
0.7% g (Franceséisme)
1.4% g (Franceséisme)
2nd Workshop RESIF, Montpellier, 31 janvier 2018 >8Test – Séisme ML 5.0 La Rochelle (2016)
> ShakeMap SA(1.0s)
2nd Workshop RESIF, Montpellier, 31 janvier 2018 >9Conclusions
> Intérêt de l’approche investiguée:
> Traitement rigoureux des sources d’incertitudes:
> Sigmas inter- et intra-événement
> Sigma des GMICEs
> Corrélation entre paramètres (e.g. PGA et SA)
> Possibilité d’obtenir des distributions conjointes de probabilités
> Performance accrue pour les séismes avec peu d’observations
> Défis à relever:
> Optimiser la rapidité d’exécution
> Influence des modèles de correlation spatiale
> Intégrer d’autres sources d’incertitudes (choix de GMPE,
magnitude, epicentre,…)
2nd Workshop RESIF, Montpellier, 31 janvier 2018 > 10Références
Bensi, M.T., Der Kiureghian, A. and Straub, D. (2011). A Bayesian Network methodology for infrastructure
seismic risk assessment and decision support. PEER Report 2011/02, Berkeley, California.
Gehl, P., Douglas, J., & D'Ayala, D. (2017). Inferring Earthquake Ground-Motion Fields with Bayesian
Networks. Bulletin of the Seismological Society of America, 107(6), 2792-2808.
Murphy, K. (2007). Bayes Net toolbox. Available from https://github.com/bayesnet/bnt.
2nd Workshop RESIF, Montpellier, 31 janvier 2018 > 11Spatially correlated ground motion fields
> Generic form for GMPEs: From Park et al. (2007)
Yi , j = f (θ i , j ) + ηi + ξ j
Inter-event error σinter Intra-event error σintra
- Common to all sites for - Correlated Gaussian field:
a given event
Where:
with
> Accounting for both cross-correlation and spatial correlation:
> Two IM types Y1 and Y2
> Cross-correlation coefficient ρ12
> 12General principles of Bayesian Networks
> BN = acyclic oriented graph è nodes (variables) and oriented edges
(statistical dependencies)
> Discrete or continuous Gaussian variables
BN structure BN inference
Root nodes Posterior
X1 X2 – Marginal distribution X1 X2
probability of X1
Child node
X4 X3 – Conditional X4 X3
probability
X5 X5
Evidence
> 13Bayesian inference from observations
> Use of continuous Gaussian BNs
> 14Demonstration on a synthetic example
> 3x3 grid (1 km grid step)
> Mw 5.5 EQ at coordinates [−3; 5]
> GMPE by Chiou & Youngs (2008)
> 2 single-IM observations:
> Yobs1: 15% smaller than GMPE estimate
> Yobs2: 10% larger than GMPE estimate
> Corresponding BN: Inter-event error
Observations
IMs at grid points
Intra-event
correlation structure
> 15Demonstration on a synthetic example
> Junction-tree algorithm:
> Updating of the probability distributions:
> 16Other shake-map methods
> The USGS SkakeMap algorithm (Worden & Wald, 2016):
> Removal of total bias from seismic records by adjusting
inter-event error term
> Interpolation between observations and bias-adjusted GMPE
estimates (weighted by distances from observations)
> Total ground-motion variability is computed from weighting of
intra-event error term with decay function
> Analytical solution (e.g. Stafford, 2012):
> Analytical resolution of a conditional multivariate normal
distribution
> 17Comparisons on the synthetic example
> Updated variables from the three methods:
> BN updating of mean values = analytical solution
> BN updating of inter-event error = analytical solution
> Total variability terms do not match
> 18Variability treatment
> Evolution of variability with distance from observation
limrà∞ σ2tot = σ2inter,post + σ2intra,post(∞)
limrà0 σ2tot = 0
> ShakeMap method: σ2inter,post set to zero
> Analytical solution: σ2inter,post and σ2intra,post are no longer
independent given observations
> 19Mw 6.2 Kumamoto foreshock on 14th Apr. 2016
Prior estimation > Metadata from USGS:
> Magnitude: Mw 6.2
> Depth: 9.0 km
> Longitude: 130.704°E
> Latitude: 32.788°N
> GMPE: Chiou and Youngs (2008, 2009)
> Total number of seismic stations: 194
> DYFI: 27 aggregated data points
> 100x100 km2 square grid
> 48x48 grid points
> 26 seismic stations considered
> 20Single-IM Bayesian inference
BN approach ShakeMap algorithm
PGA
shake-map
Uncertainty on
ln(PGA)
> 21Joint inference of cross-correlated IMs
PGA [g] SA(1.0s) [g]
> Ability to compute joint probabilities at a given site
> Helpful for the assessment of infrastructure systems affected by
multiple types of IM
> Seismic stations with missing data can still be used to constrain the
ground-motion field
> 22Accounting for macroseismic observations
PGA [g] MMI
> 200x200 km2 square grid
> 96x96 grid points
> 90 seismic stations considered + 14 macroseismic observations
è ~ 1 hour of processing time on a (slow) personal computer
> 23Vous pouvez aussi lire